 Maximiliano Palay
Maximiliano PalayThis is the final project I've been working on to graduate as a Telematics Engineer @ Universidad de Montevideo. I've decided to document the process and share it on Hackaday after much progress was already made, but I'll do my best to share every step. Will try not to get too technical on the involved research. Many design considerations, including a biomechanics analysis, partial geometry optimization of a few design parameters and more are not shared in this post for the sake of simplicity and understanding. If you'd like to see that, the thesis pdf will be shared. Hope this can help someone!
I've been referencing other projects and research, and have taken inspiration from those. This project does not claim improvements over available work. It was a humble and simplified attempt at creating something super complex.
Although I'm working and presenting this work on my own, it wouldn't have been possible without the help of many people, who really got involved in the project. Each one of them contributed to this. Be it from a technical, researcher, or subjective perspective, or those that just asked about the project every now and then, thank you.
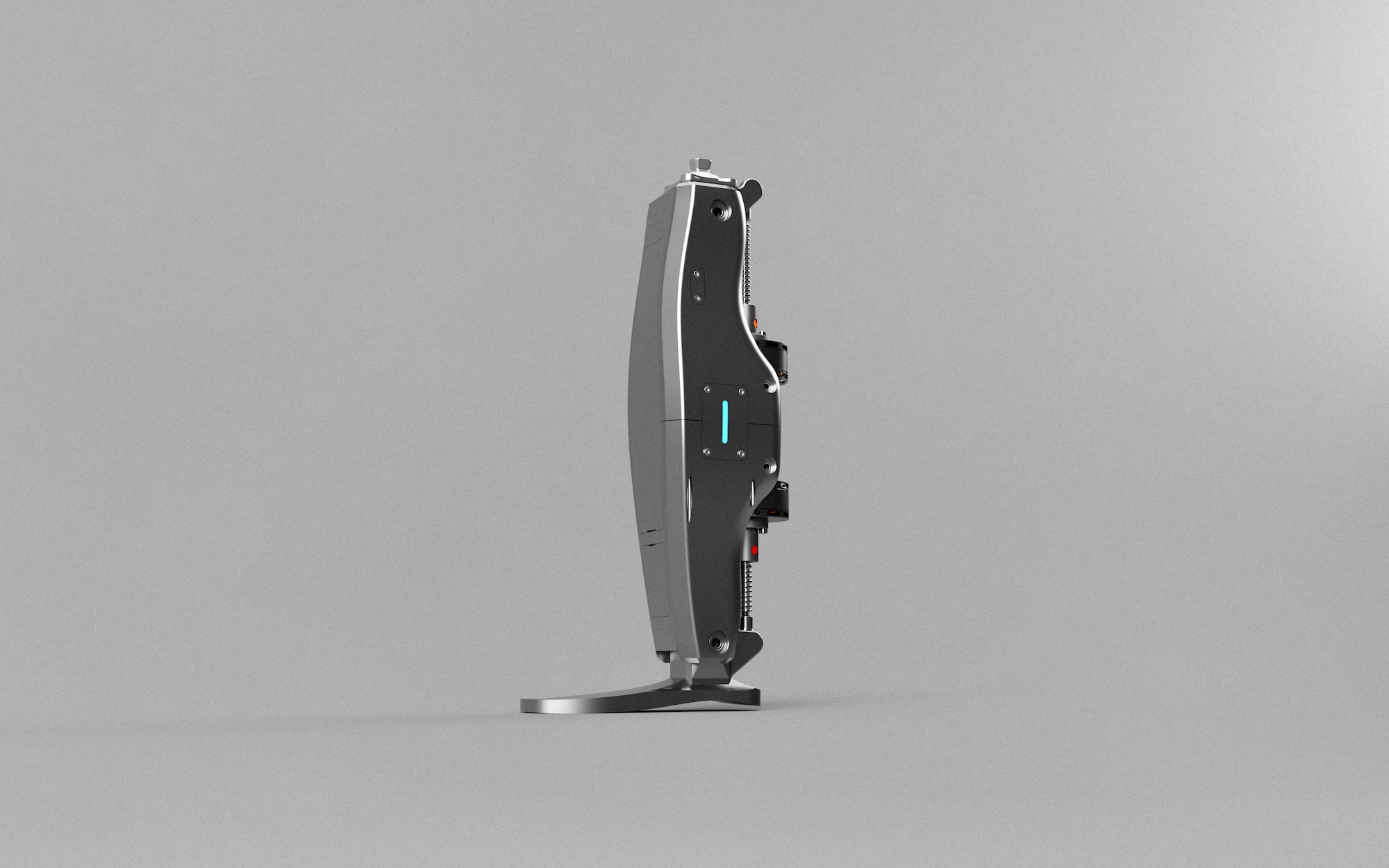
Main design inspiration comes from Matt Carney, PhD's work at the Biomechatronics MIT lab. His thesis, called "Design and Evaluation of a Reaction-Force Series Elastic Actuator Configurable as Biomimetic Powered Ankle and Knee Prostheses" was a key resource for this work. Although this is a much simpler and less spec'd version, I intended to give it a try with a restricted budget and with purely hobby components.













 Joe
Joe
 Peter Sinclair
Peter Sinclair
 Hunter Santana
Hunter Santana
 AngelLM
AngelLM
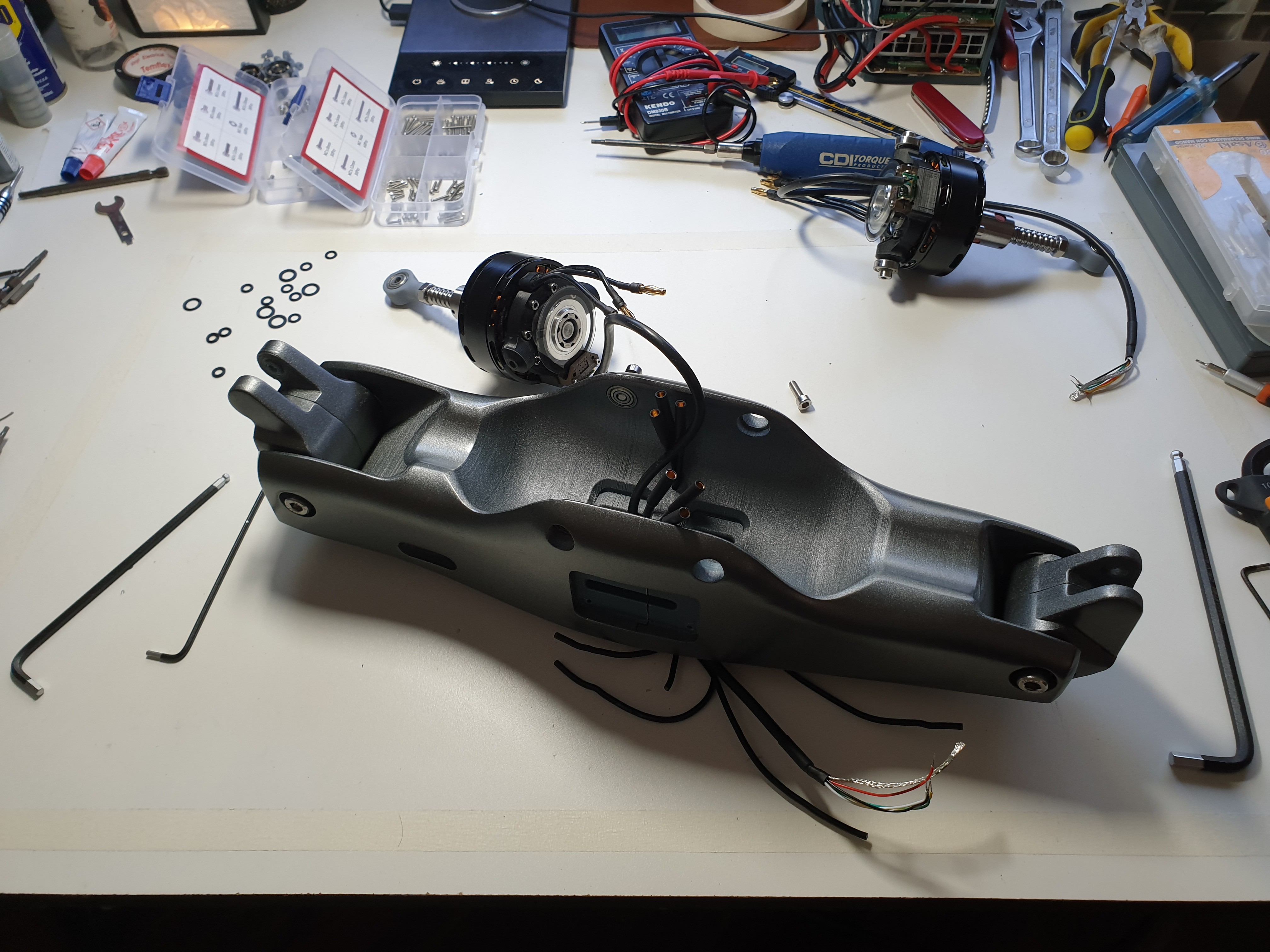
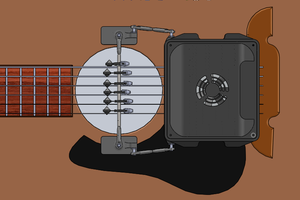
Excellent effort! Really good mechanical solution with two motors - it solves several problems at once!
Have you tested how much current it requires under full load, and have you estimated what kind of loads appear on major joints (especially important if another material will be used)?