 schwarzrmsu
schwarzrmsuI will be adding project details once I have the project a bit more finalized. I plan on adding very detailed descriptions for each circuit, but would like to avoid re-doing a bunch of stuff if changes are required.
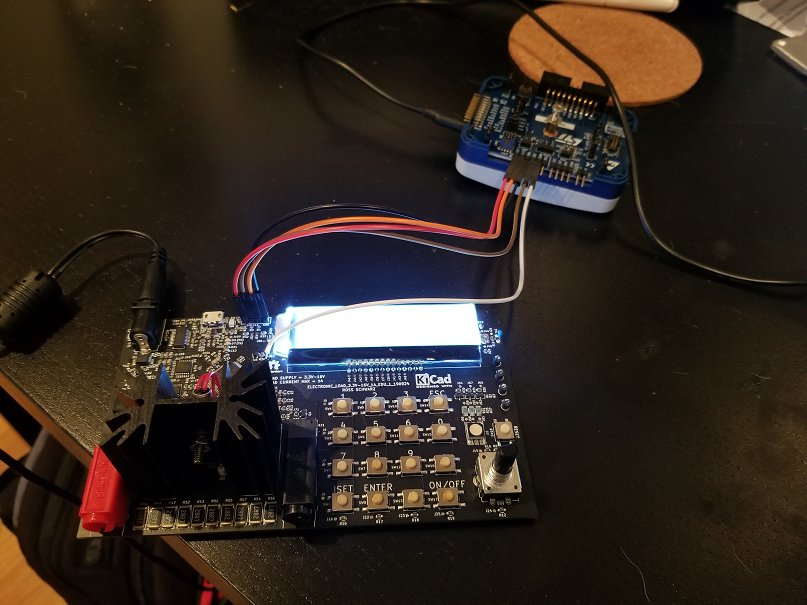
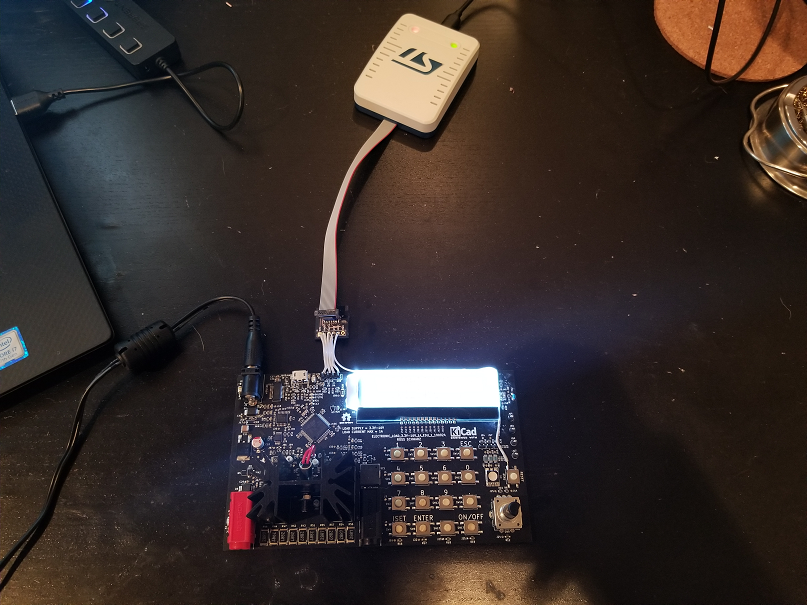
Please follow project logs in short term for project related details. I plan on providing updates after completion of major milestones.
















 jlbrian7
jlbrian7
 agp.cooper
agp.cooper
 silver2row
silver2row
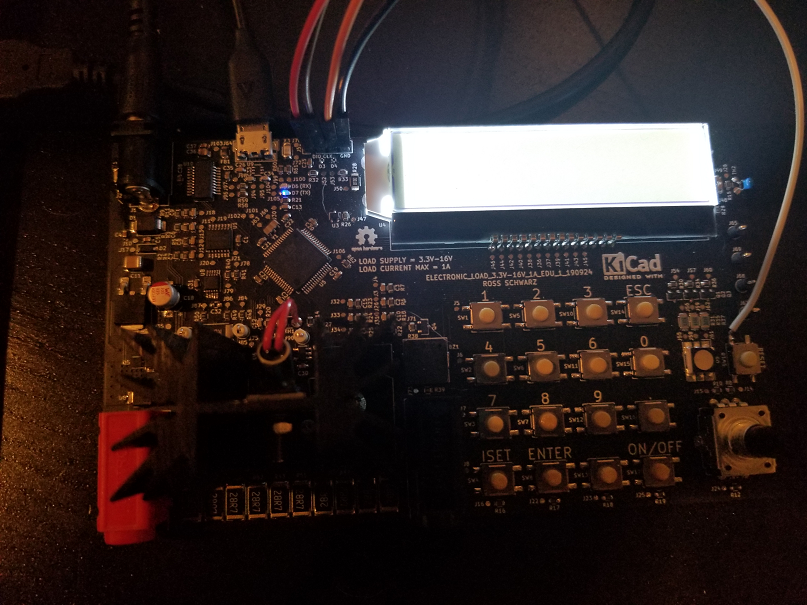
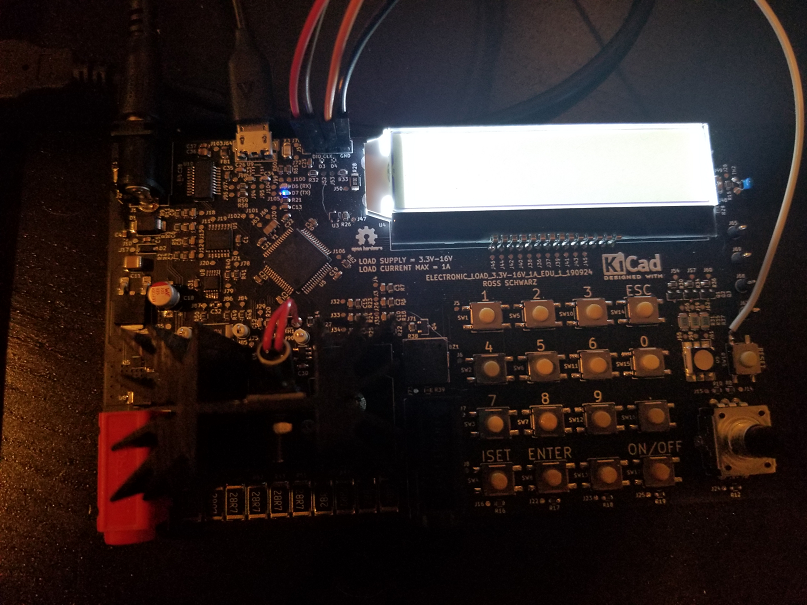
That project is really great. It really stands out head and shoulders above all of the other low power DC power loads in terms of user interface.
If i could just give some ideas for later versions (if you are considering making any more ofc.):
- Some sort of fan header. You can get greater currents that way, since you can get more power out of the system.
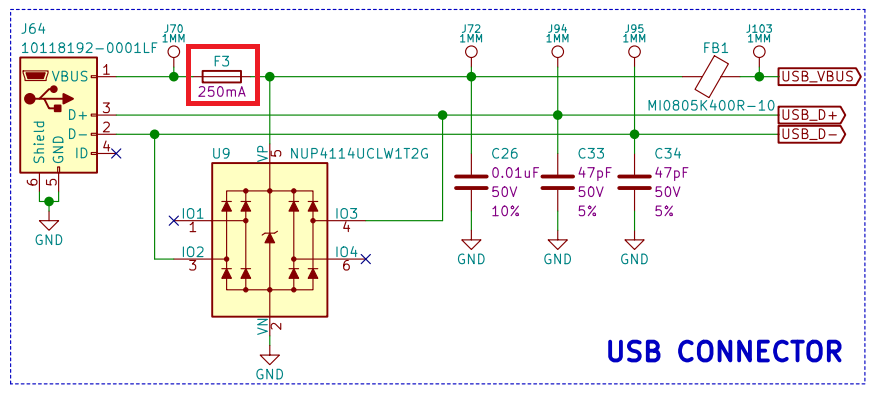
- Getting USB CDC driver is really easy using the STM32 tools (like the CubeMX). I'd personally go with one of the STM32F042 and skip the FTDI IC.
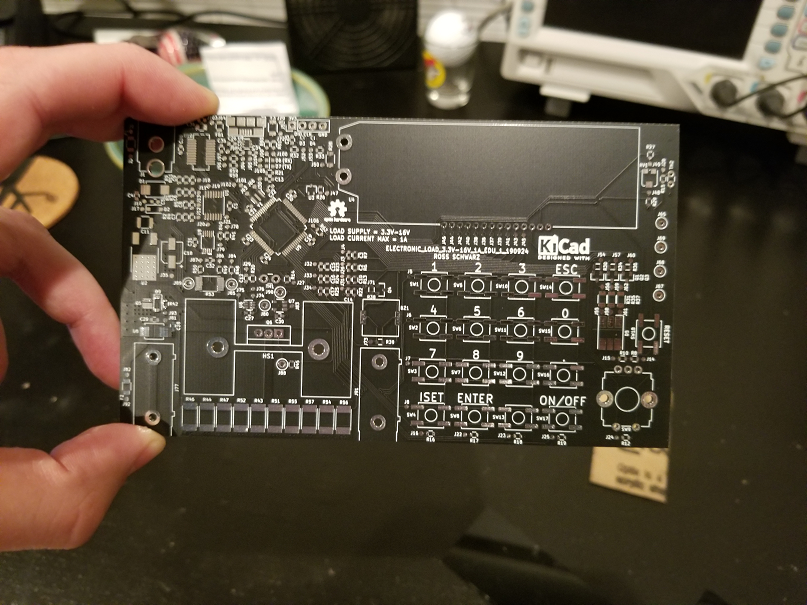
Also your layout and documentation are really nice. Way nicer than some commercial products i've had to redesign.