 Pavel G.
Pavel G.Goals
- 10kg/cm torque at 180 degrees per second (30 RPM)
- 3D printed with minimum hardware
- Easy to get hardware from aliexpress or amazon
- Price target < 50$
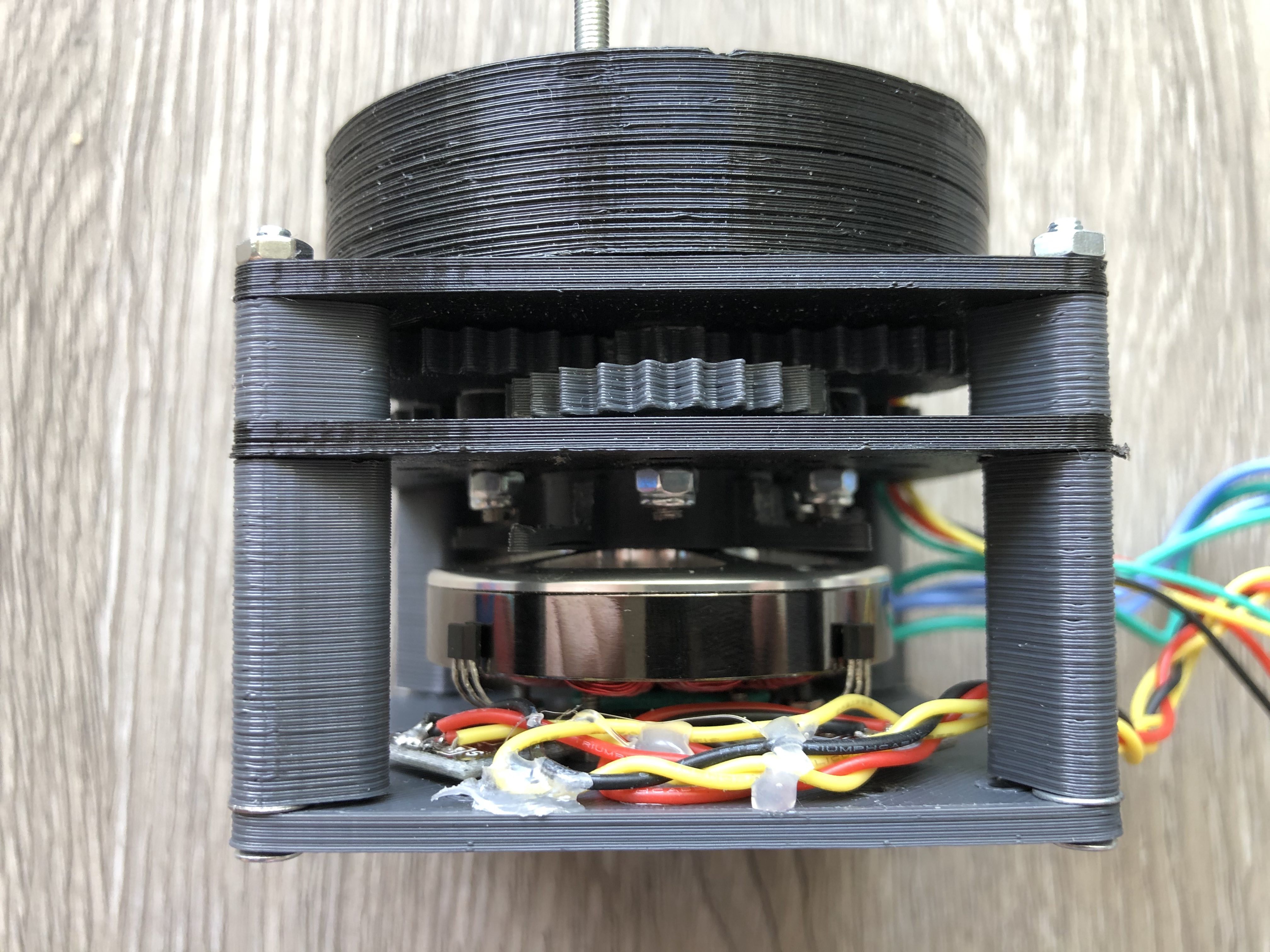
- Compact (at least actuator itself, electronics can be outside) - my target is a 70x70 for footprint - height is 64mm
- Lightweight (currently 299g)






 Dharshan
Dharshan
 Thomas
Thomas
 hIOTron
hIOTron