 Frank
FrankConcept
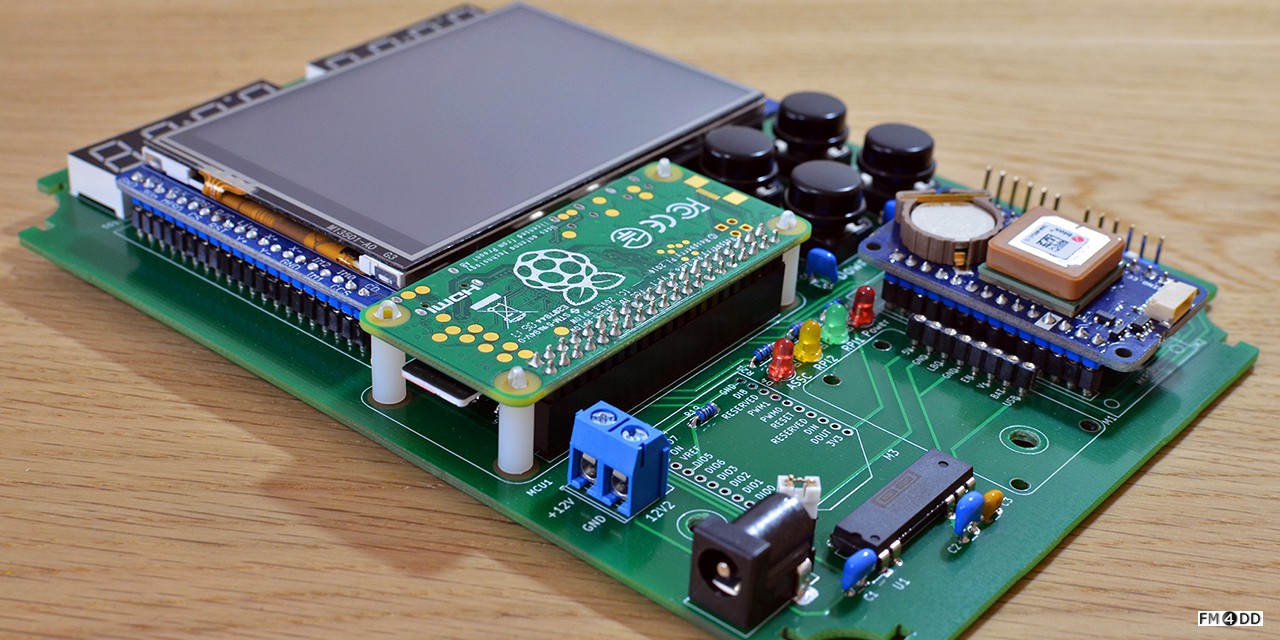
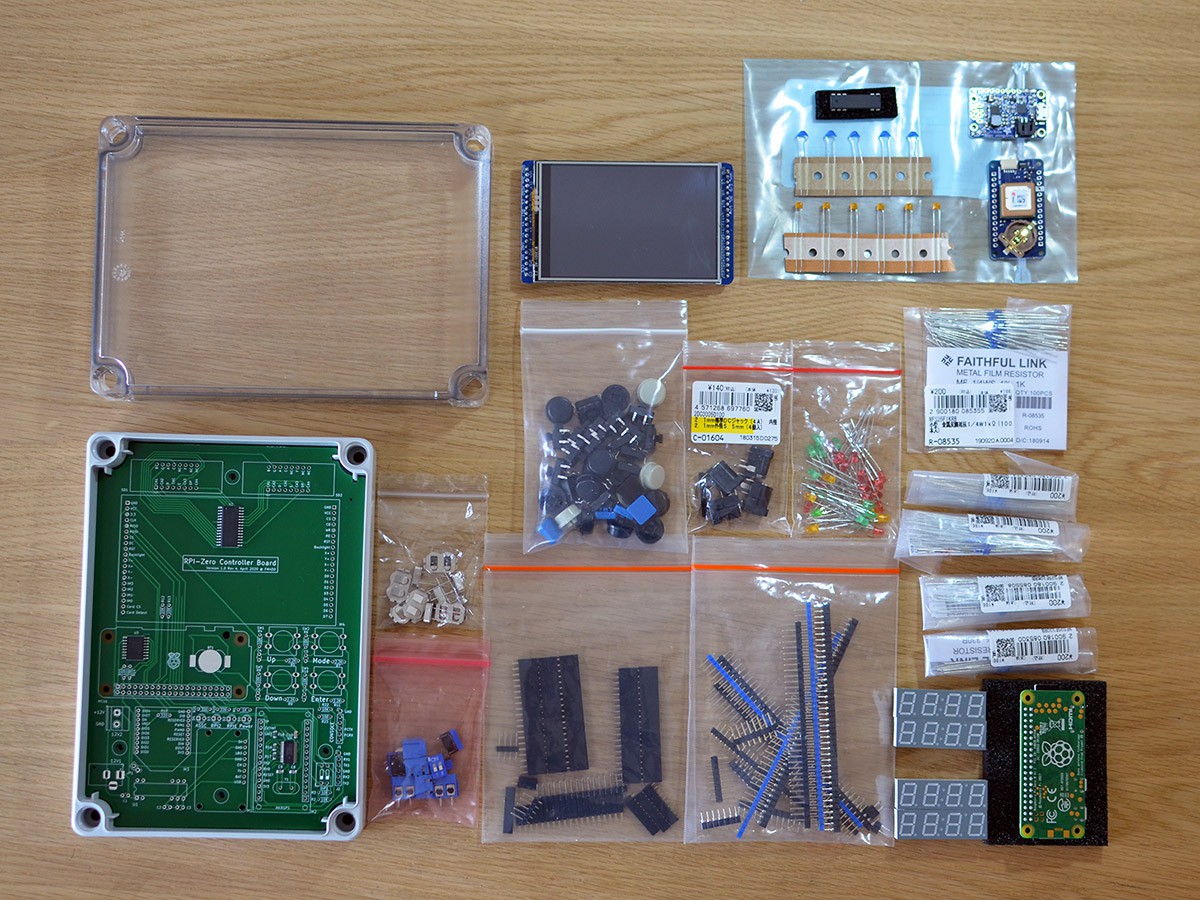
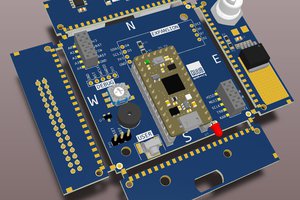
PiCon One is a multi-function controller for automation and industrial use cases. Instead of juggling multiple hats, I wanted an integrated device with environmental protection. The result is a controller board integrating the Raspberry Pi Zero W, fitted into a industrial enclosure from Takachi.
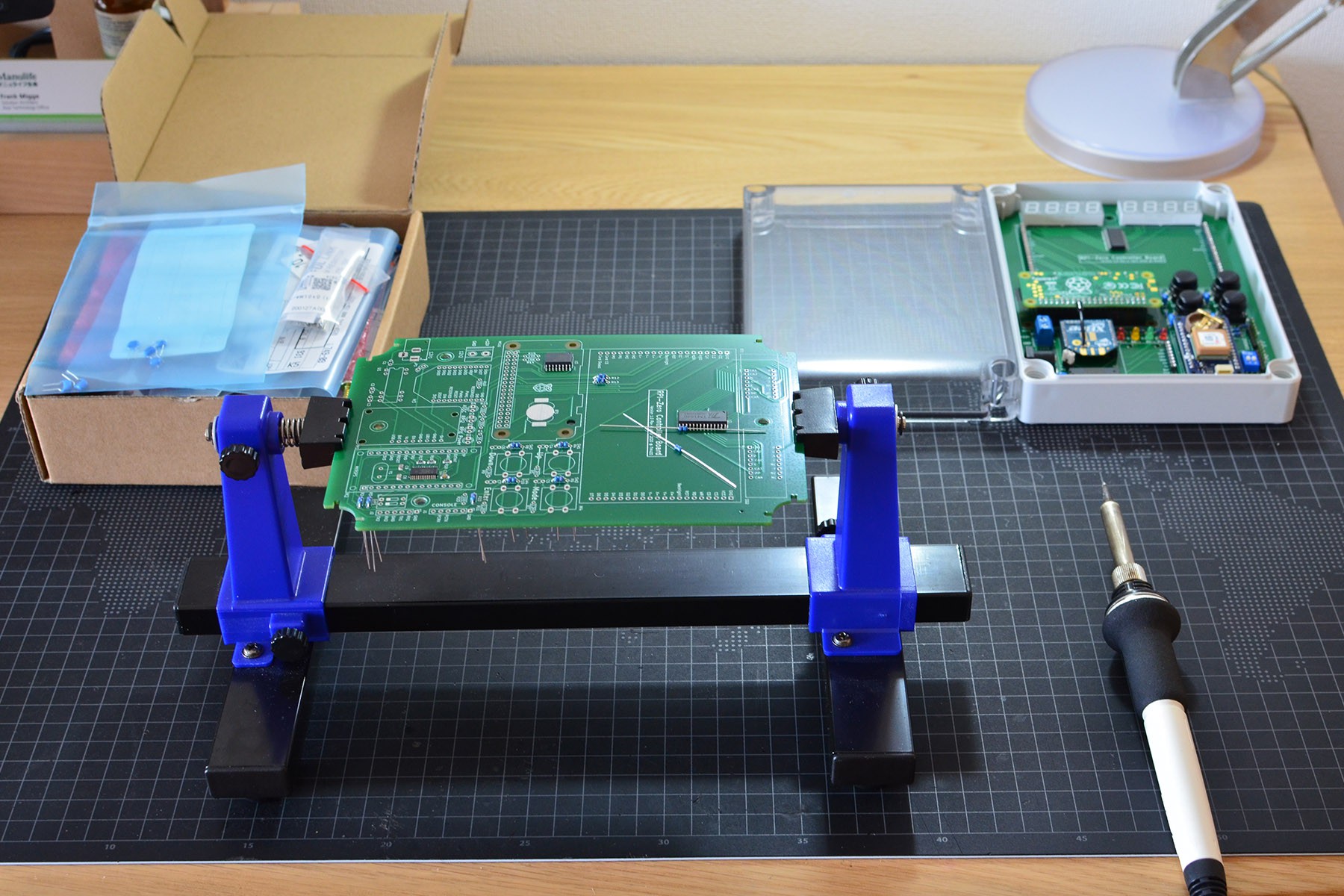
The enclosure is rated IP65, making the controller "dust tight" and protected against water spray. This should let it operate 24x7 in less ideal environments.
What functions does it have?
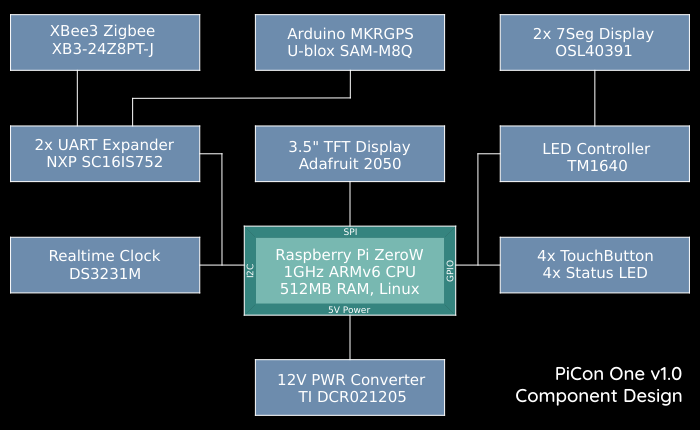
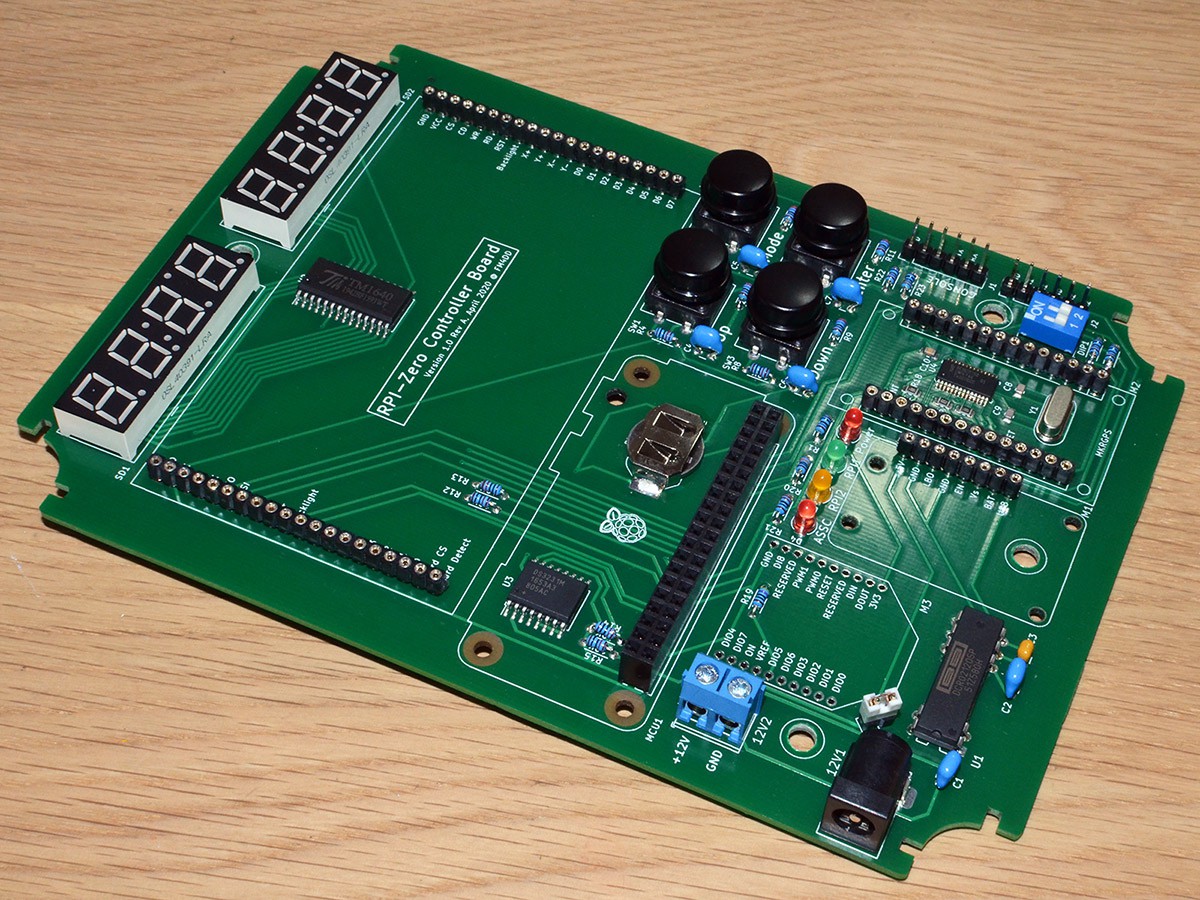
The first design iteration has below set of devices:
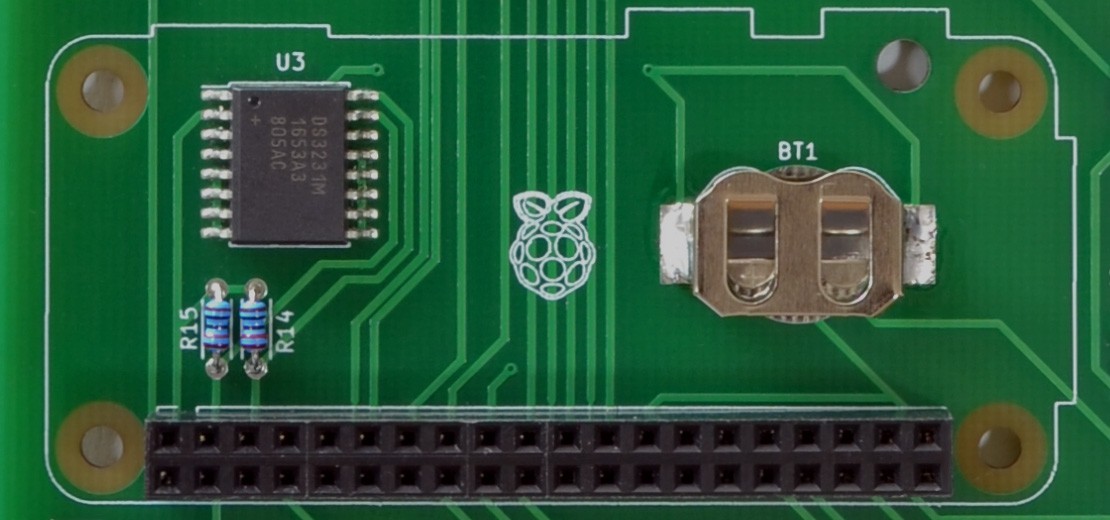
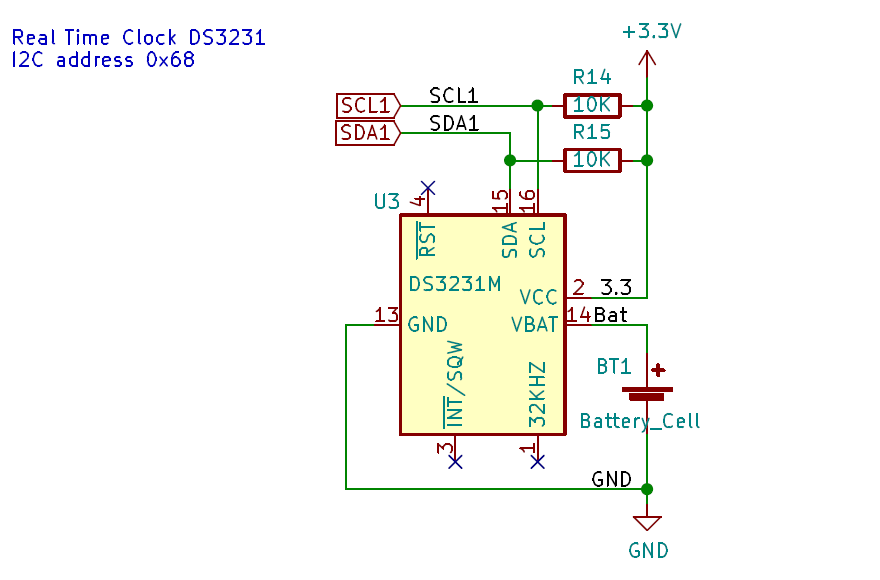
- DS3231 battery-buffered realtime clock (RTC)
- 2x additional serial ports via 16S752
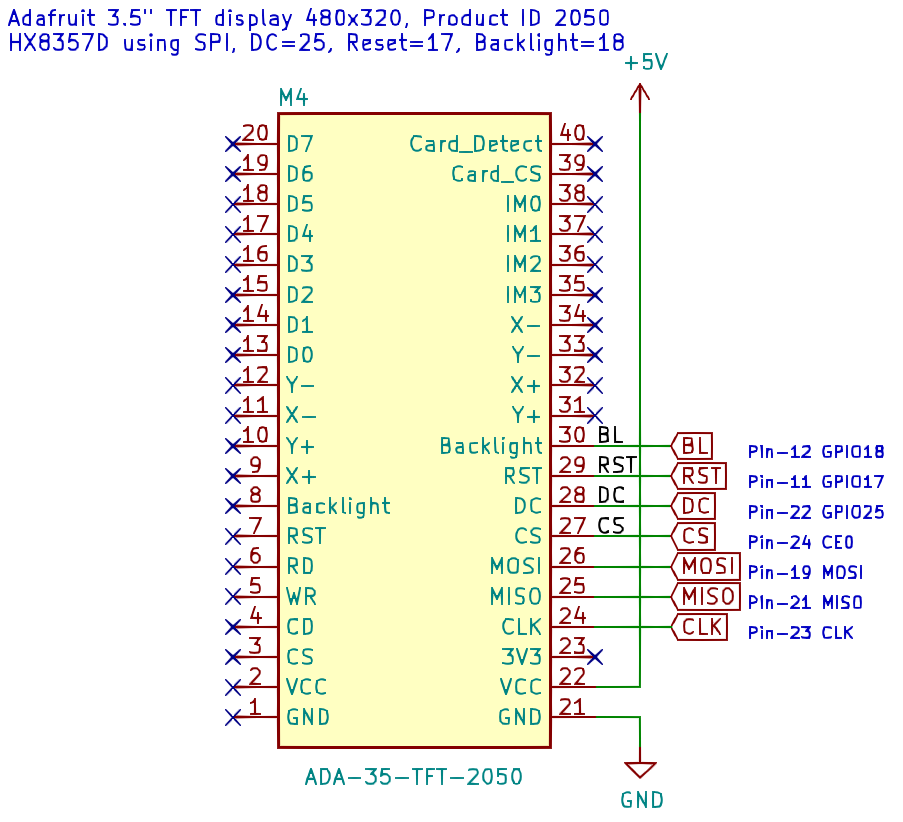
- 320x480 TFT display
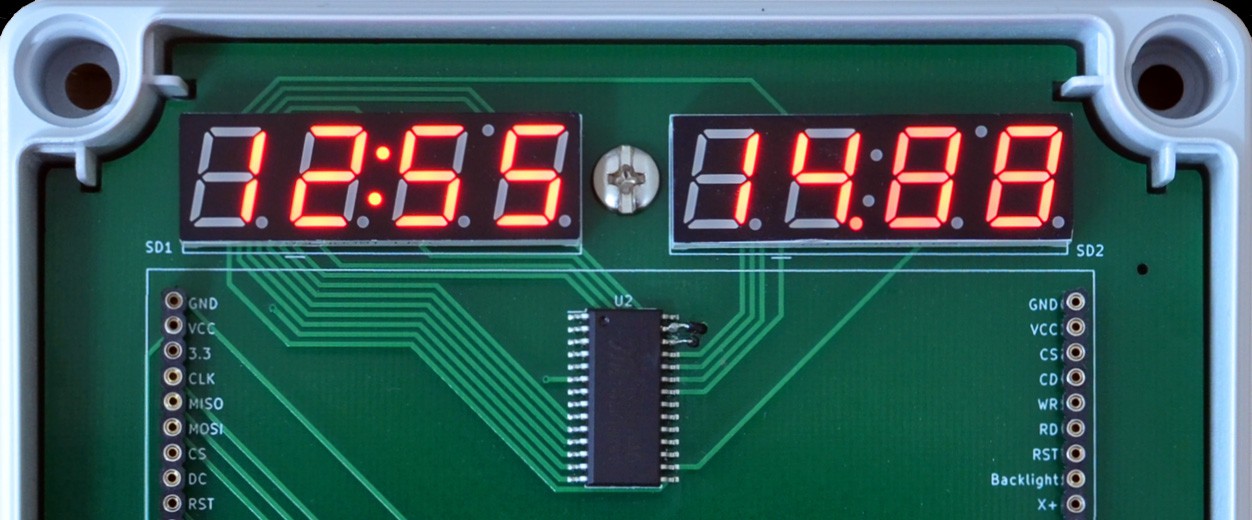
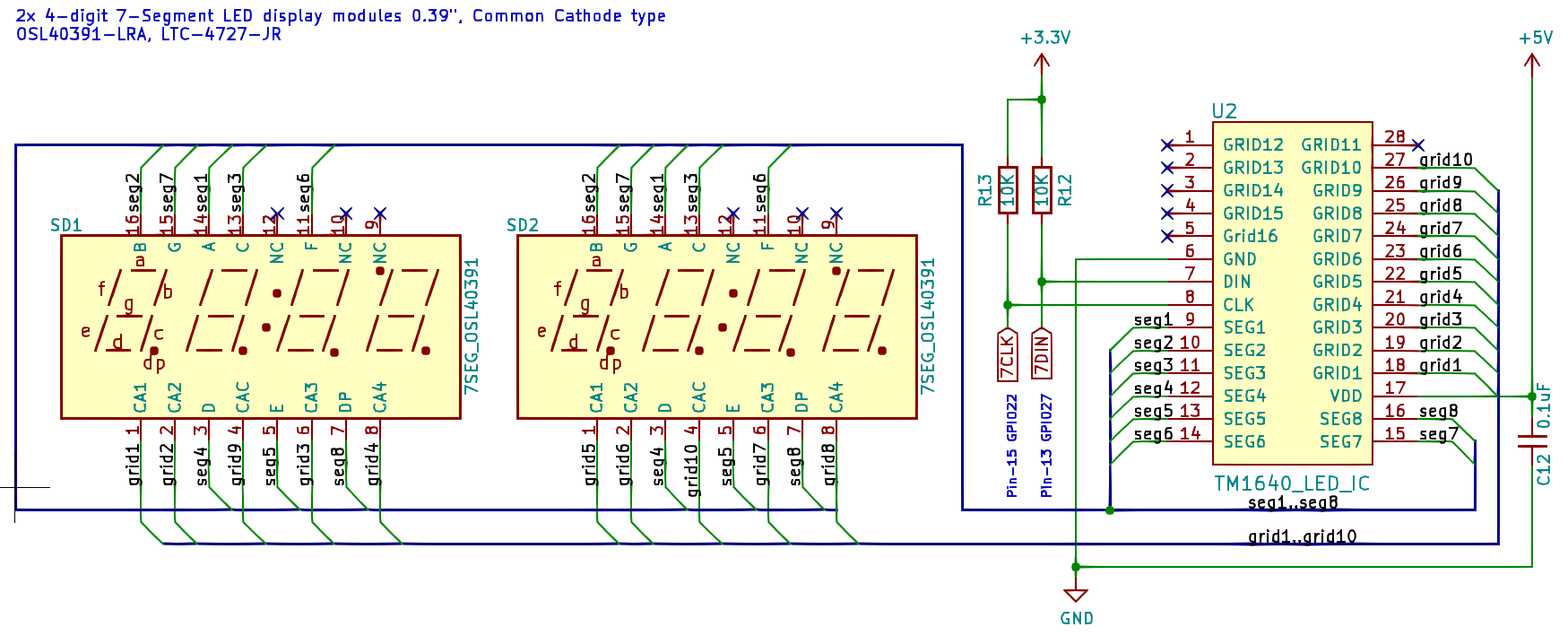
- 2x 4-digit 7-segment LED modules
- 4x pushbuttons
- 2x programmable status LEDs
- GPS module interface
- XBee Zigbee module interface
- Serial console port connector
- flexible power options
- UPS-style Lipo battery backup
The realtime clock, paired with the GPS module creates a high-precision time source, usable in places were no network is not available.
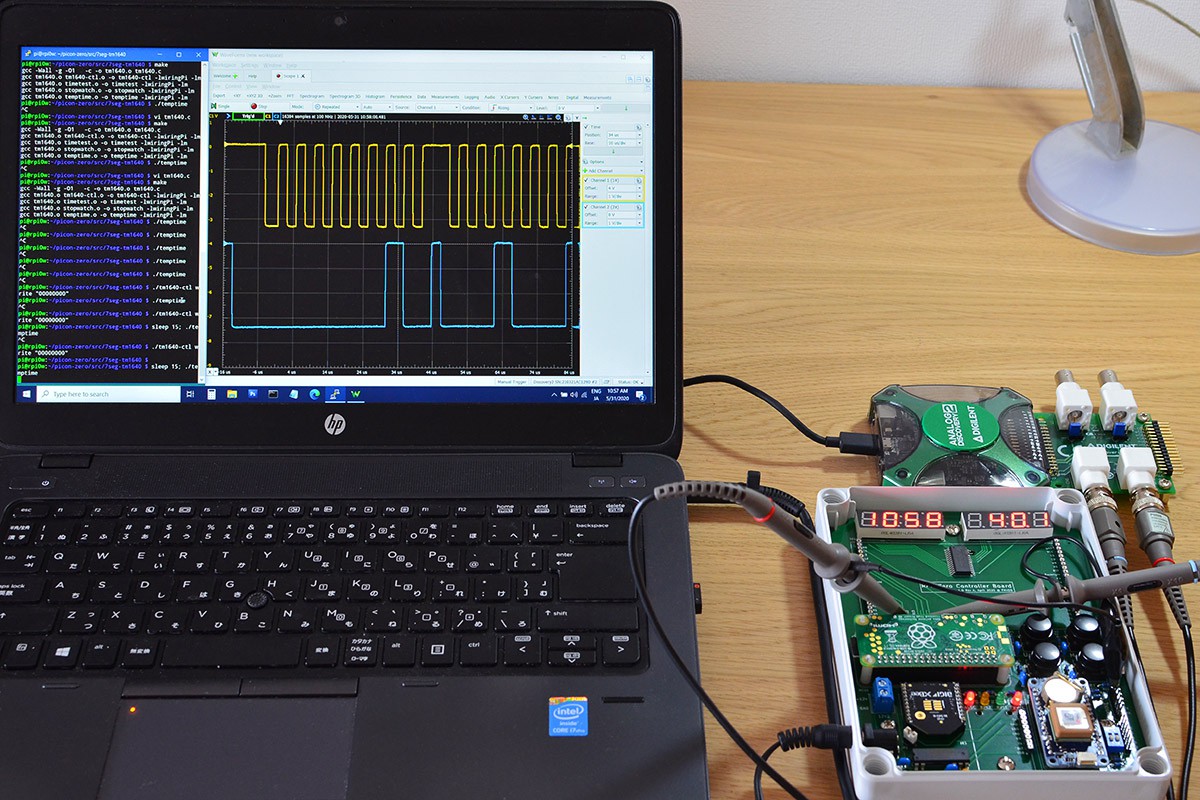
The seven-segment display has a fast response time, and is well suited for prominently showing quickly changing measurements.
The TFT display provides system output, and with 4 input buttons provides a graphical user interface.
The Xbee radio module broadcasts control data to a group of devices for motor control, or receives sensor data input back.
Why did I make it?
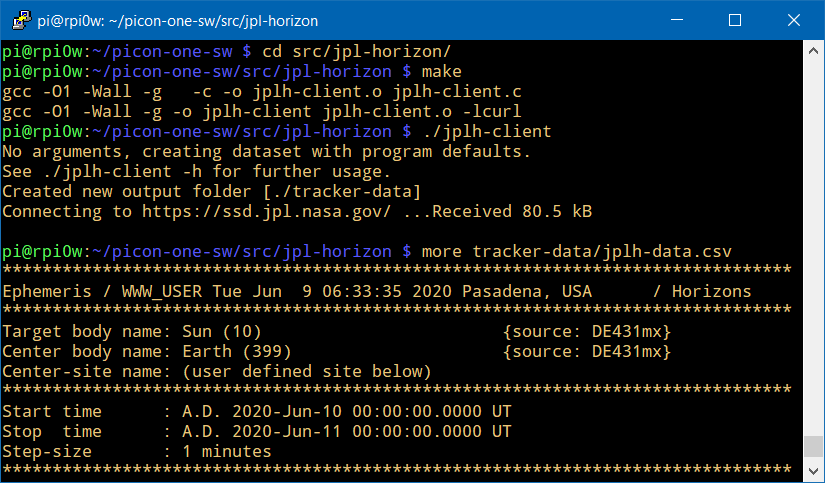
I wanted a compact, fully integrated multi-function control hub for solar systems. I want it to be able to do power generation monitoring, data logging, to calculate and transmit solar panel position data for motorized solar panel orientation. It should have protection to let it function outdoors.
Other potential uses cases
- Wind power generation control and monitoring
- GPS location tracking and autopilot steering control. e.g. for boats
- Home automation, status monitoring and HVAC system control
What makes it different
While checking if this has been built before, I found available solutions are typically meant for further integration into bigger systems. They are either designed as pure compute units (e.g. Strato Pi with DIN rail mounts and no display), or as touch displays for kiosk-style applications (e.g. Industrial Shields). Possibly the closest one is ModBerry.
I could not find one that was ready to be used outdoors without further construction and mounting, and having the set of peripherals integrated and ready to use.
Why Raspberry Pi Zero?
Pros:
- Full OS with good development options
- Wireless networking for ease of access
- Widely available, common platform with great ecosystem
- Long lifecycle
- Attractive balance of cost, size, and features
- Modest heat generation
Cons:
- Rather large default Raspbian OS footprint (approx. 1GB even for "lite")
- OS computing overhead
- SD card storage somewhat slow
I briefly considered other SoC boards such as Beaglebone (+eMMC, -Wifi), NanoPi Neo2 (+size , +CPU, -GPIO), and higher-end MCU's such as Cortex-M7 (e.g. Teensy 4.0). An MCU would be a much cleaner hardware design, but does require a lot more investment in software and UI development that I won't be able to handle with my time budgets.
For an industrial controller, the RPi Compute Module is an attractive choice as well, but needs more consideration on the trade-offs.
What is the current State?
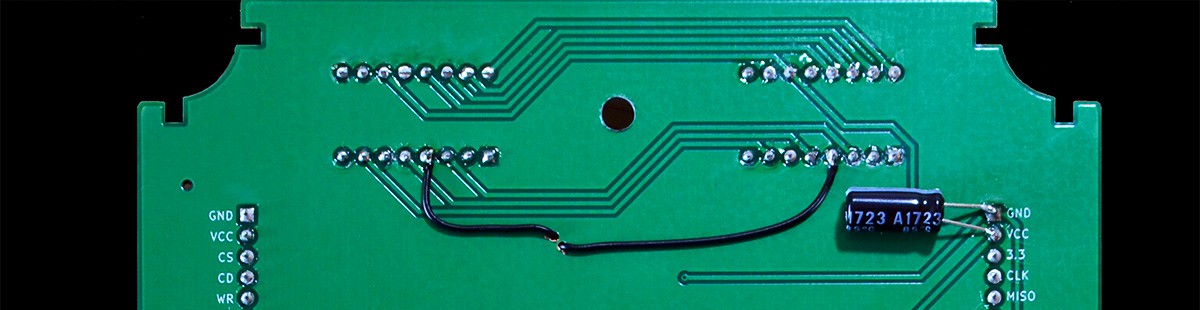
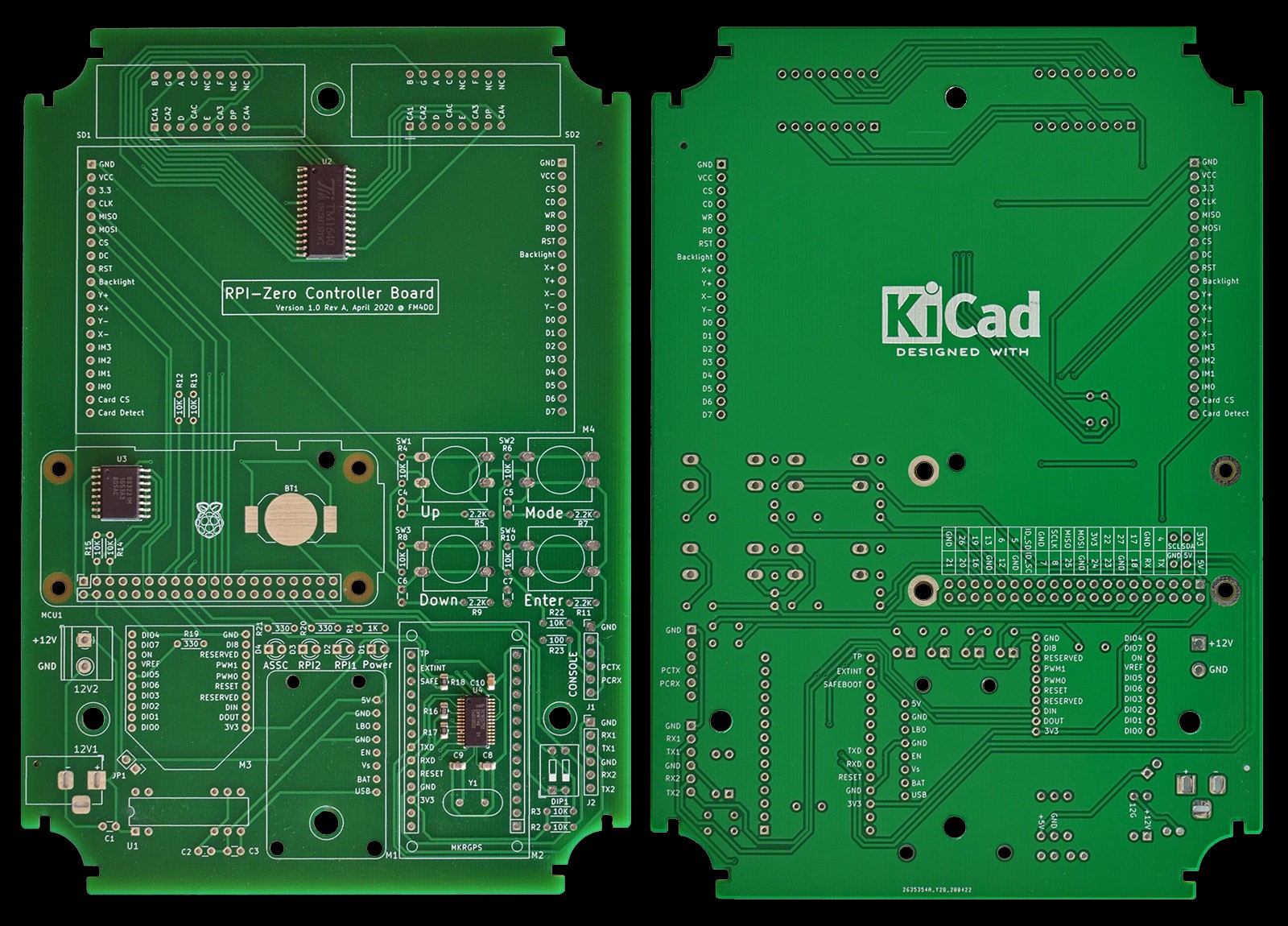
The first alpha PCB has been created, and two prototypes have been assembled. The peripherals are verified working, and I am busy working through software integration.
If you have been reading to here and have comments for improvement, I'd love to hear about it. As every new design attempt, a number of shortcomings call for improvement. I keep an issues list in Github.
I really appreciate suggestions on PCB board design, sharing best practice, and especially about good power rail design. Ideally, PiCon One gets a power input selection for grid or solar, a battery backup, and a PI shutdown+power-off logic that...
Read more »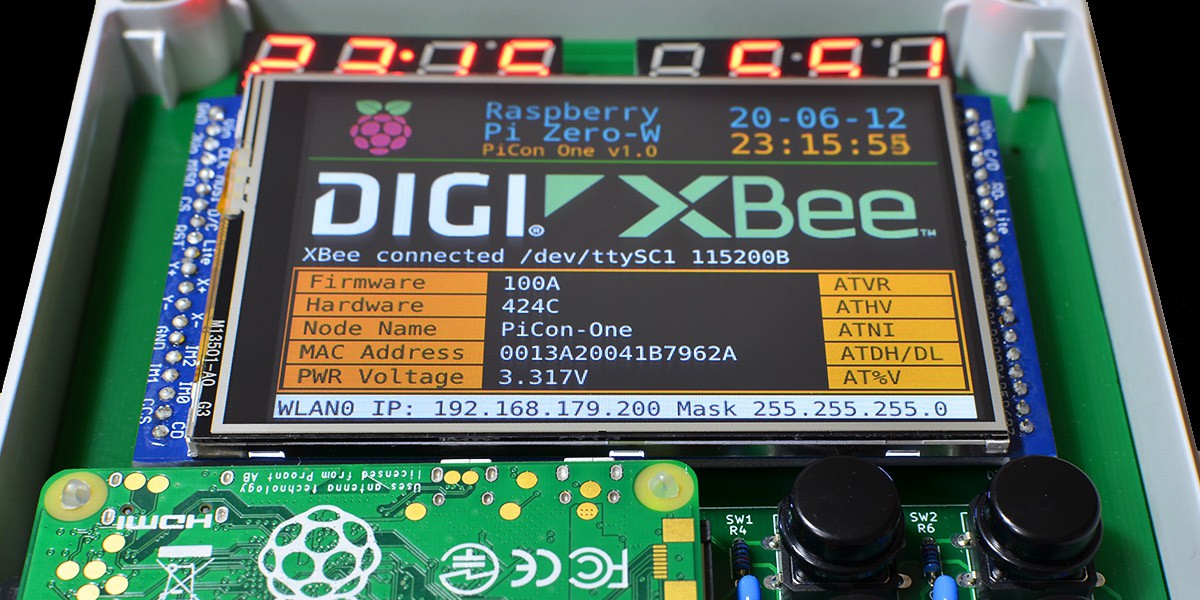











 rob
rob
 Jean Alinei
Jean Alinei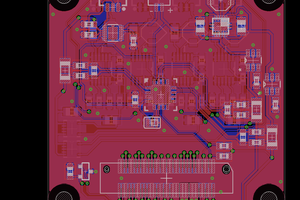
 Pinski1
Pinski1
 Jarred
Jarred
Esp32 Based IoT Controller is a low-power system established as the go-to chip or module in the IoT world.