 ArsenioDev
ArsenioDev

Realized to my dismay(and likely yours) that I will be unable to open source this rocket guidance project. Due to ITAR and this being classified as Defense-related I cannot export this code or hardware outside of the continental US. Link for those who wish to research more on these regulations. ITAR Regulations 121.1, Category 4, paragraph H:
(1) Flight control and guidance systems (including guidance sets) specially designed for articles enumerated in paragraph (a) of this category (MT for those articles enumerated in paragraphs (a)(1) and (a)(2) of this category);
Note to paragraph (h)(1): A guidance set integrates the process of measuring and computing a vehicle's position and velocity (i.e., navigation) with that of computing and sending commands to the vehicle's flight control systems to correct the trajectory.
As a reminder, this project MAY fall under ITAR restrictions and as I do not have the funds to file for verification, I am playing it safe by not sharing code or CAD. This system is not designed nor intended to be used as a weapon, rather just keeps a high-power sport rocket flying vertical. No I will not help you port my work to be used in mortars/missiles (yes people have seriously asked this). I am doing this project as a personal challenge to learn new skills, processes and to broaden my project scale horizons, I harbor no malicious intent.
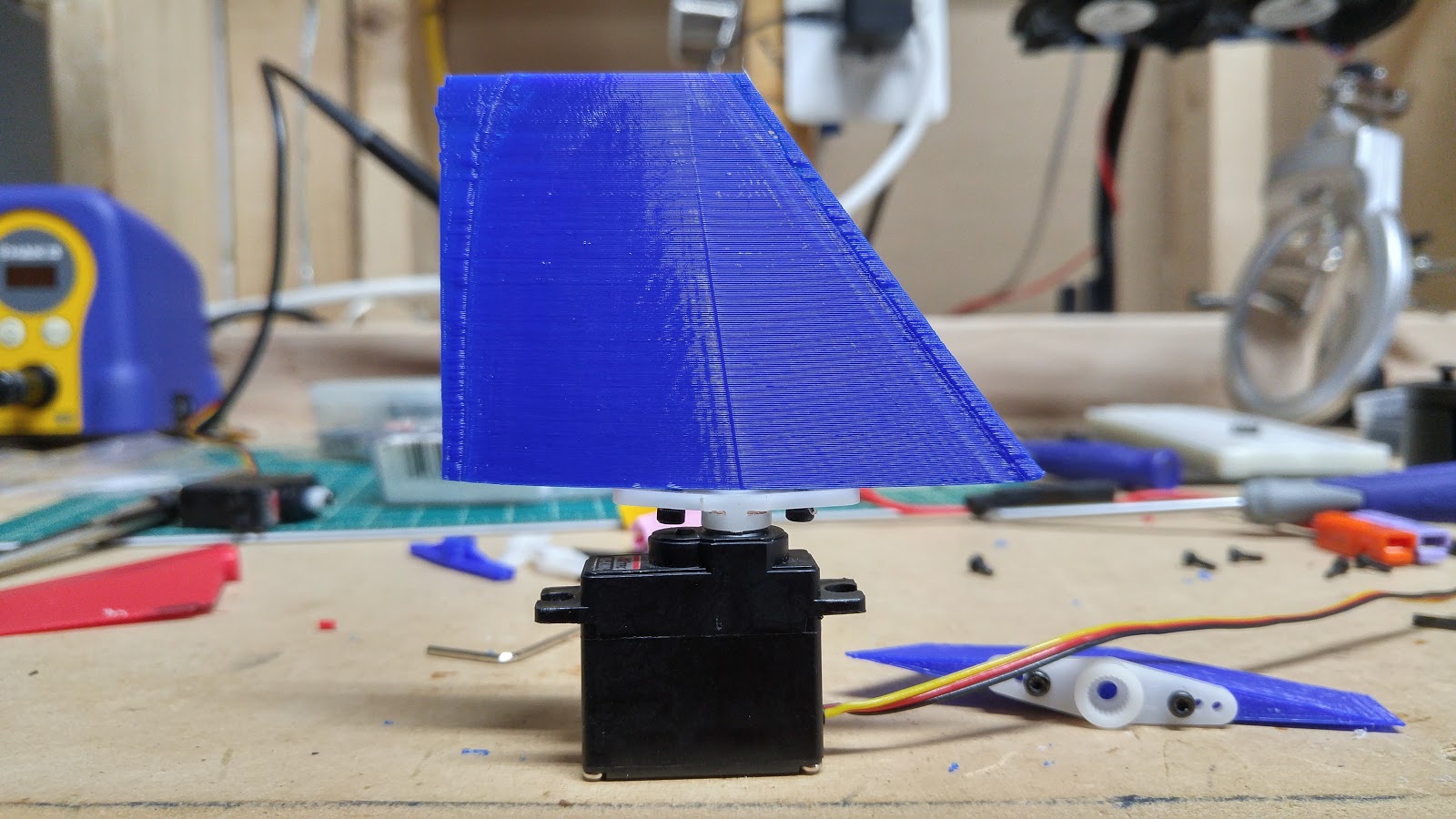
Preliminary rough prototype completed! https://vine.co/v/M2bnuHb19q3
Reprinting with fixed tolerances https://vine.co/v/MEJTLW6UvmV
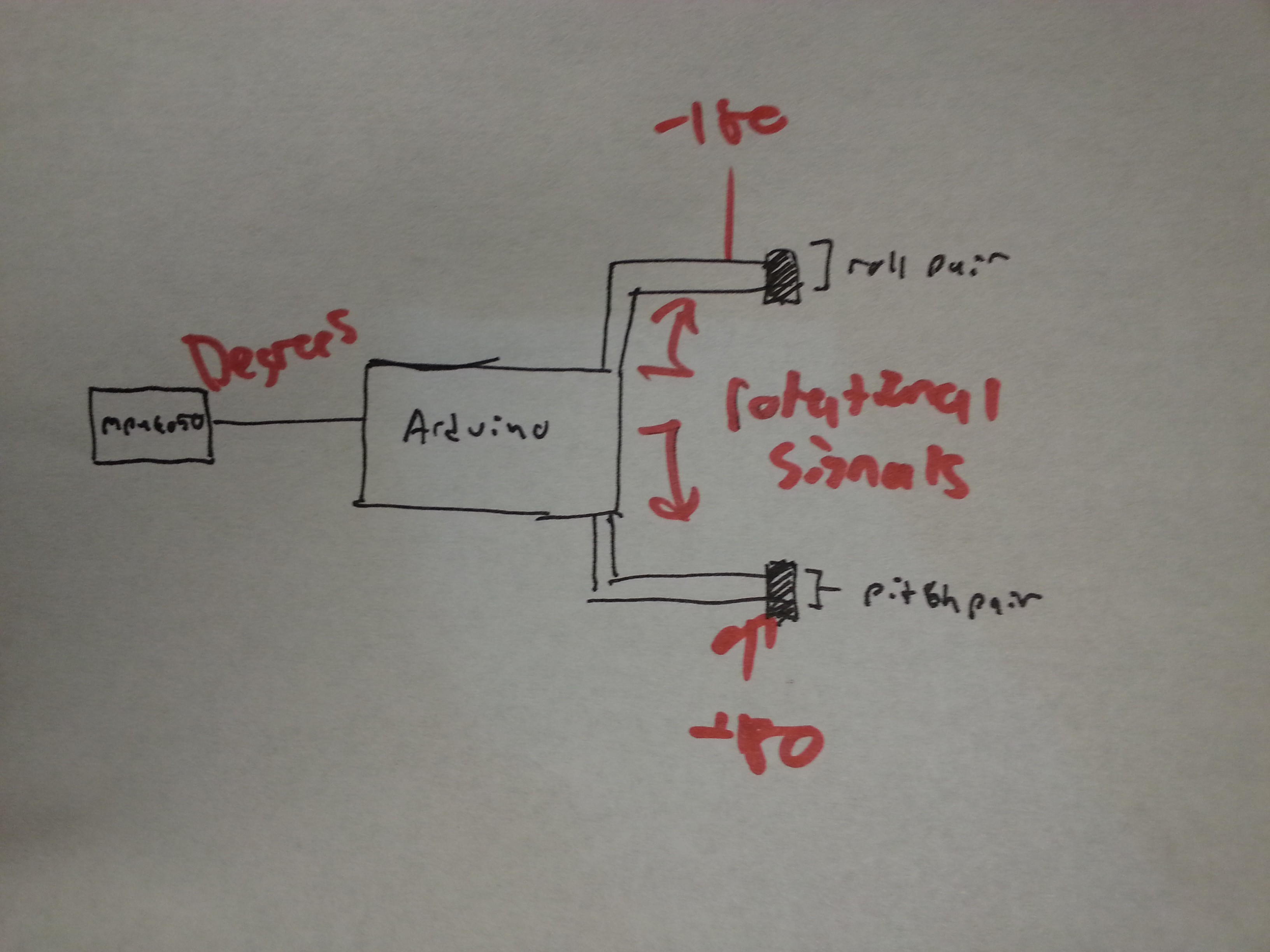




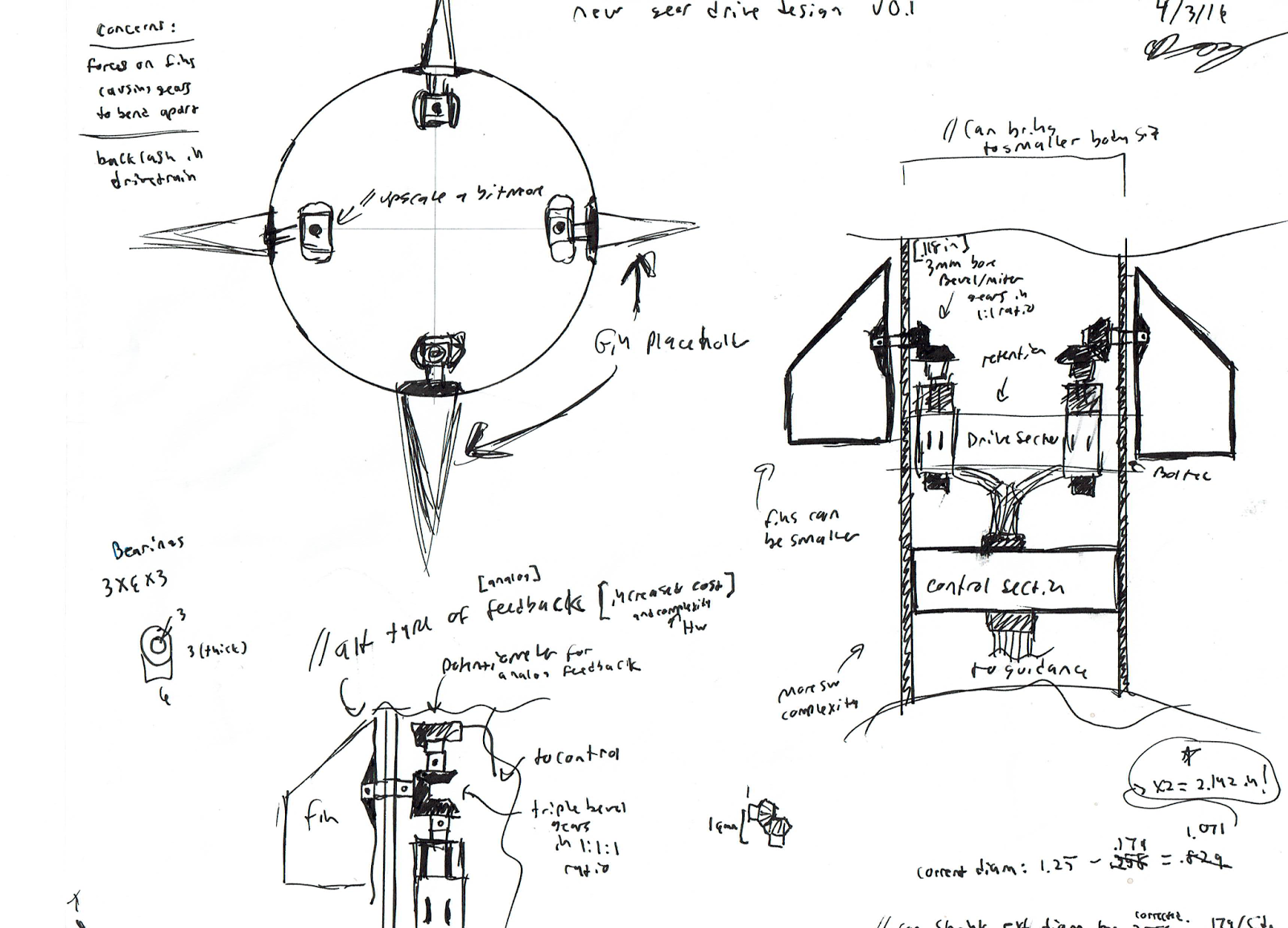
![Basic system block diagram with in-progress notes [Blackbox project note censored for safety]](https://2.bp.blogspot.com/-we0Mu2rvEdU/V6yysIw2znI/AAAAAAAAE4M/AhE1K0zwfZcYhVw-kNRZd2U_1QhGHUykgCPcB/s1600/002.png)
















 Jon VB
Jon VB
 Drew Pilcher
Drew Pilcher
 Cees Meijer
Cees Meijer
 Yohan Hadji
Yohan Hadji
Nice work. I would love to see a test flight. Maybe you could launch it at an angle so we can see it correct?