 Juha Kuusama
Juha KuusamaLitePlacer is a pick and Place machine aimed for a prototype building stage. It is:
- Accurate! – Reliably places 0402 passives
- Easy to assemble! – No special tools or precision instruments needed
- Vision! – Two cameras
- Affordable! – DIY kits are available
Here is a video introducing and explaining the operations. Full details at www.liteplacer.com.
For reference and keeping history intact: Here are the old details:
Full details and instructions will be published once the project is finished. I don't see much point in documenting something that is changing as fast as the project is now. Code and CAD repositories will come.
The images:
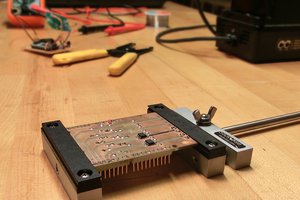
Detail of the pick and place head: You can see a limit switch, rotation mechanism and the vacuum tube with a needle holder.
A teaser from the instructions: As said, full instructions will be provided. As a teaser, I'm showing one image from the work in progress. :)
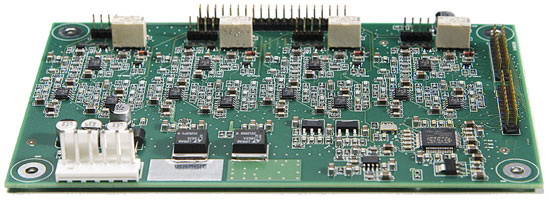
The machine itself
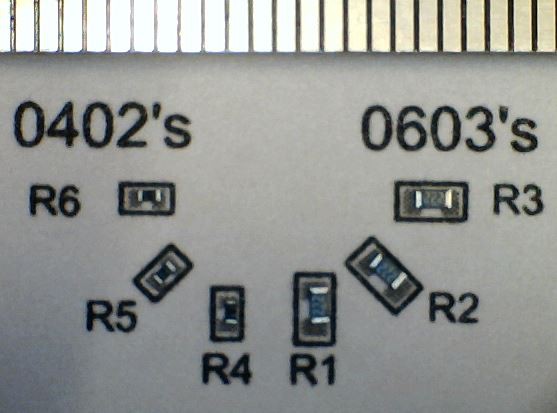
Results, 0603s and 0402s placement results.
Components
I will also publish the full component list with sourcing information later, probably on the projects own website.
System Design
My system design consists of two documents (for now). First is the LitePlacer Concept Diagram which is just that. I tried to produce it as an image, but it didn't turn out well, and this site only allows image downloads. So, here is an external link to it.
The other is the LitePlacer Mechanical assembly, which is a pretty cool zoomable and rotate-able PDF of the mechanical design. You can find that here.
 Should be simple from here. :-) It would have been nice to get the software fully done before holidays; that almost happened. But right now, I don't have time to even shoot a video, I'll be away with the family soon.
Should be simple from here. :-) It would have been nice to get the software fully done before holidays; that almost happened. But right now, I don't have time to even shoot a video, I'll be away with the family soon.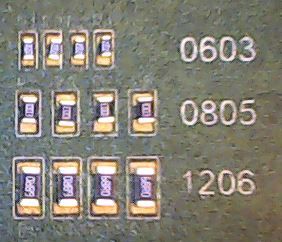

 Alex Rich
Alex Rich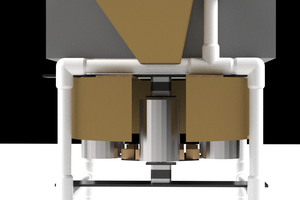
 Blue Ice
Blue Ice
 jean
jean
 David
David
Really good