 HACKRC
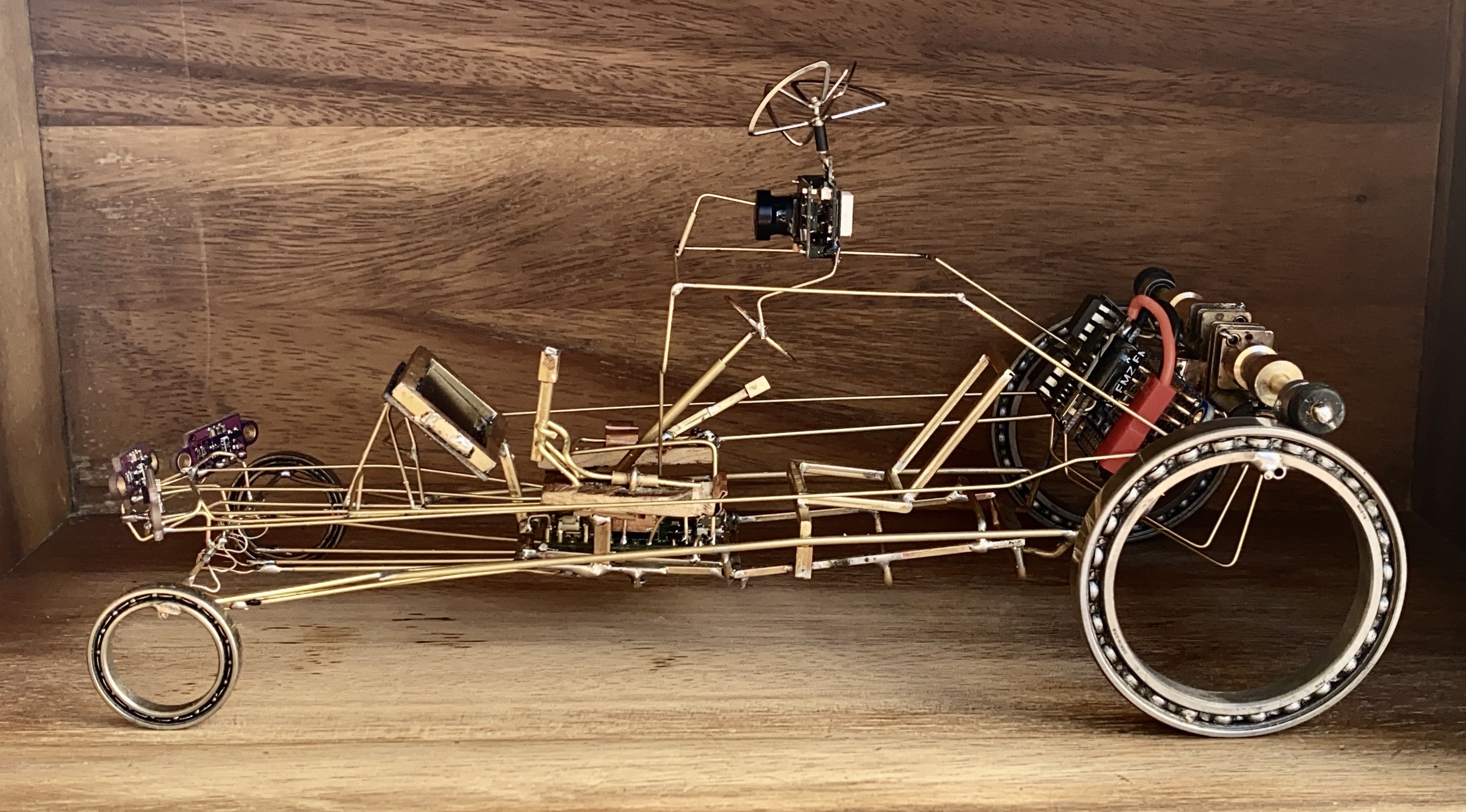
HACKRCCreated a brass-wire autonomous car as an entry into the 2020 Hackaday Circuit Sculpture Challenge.

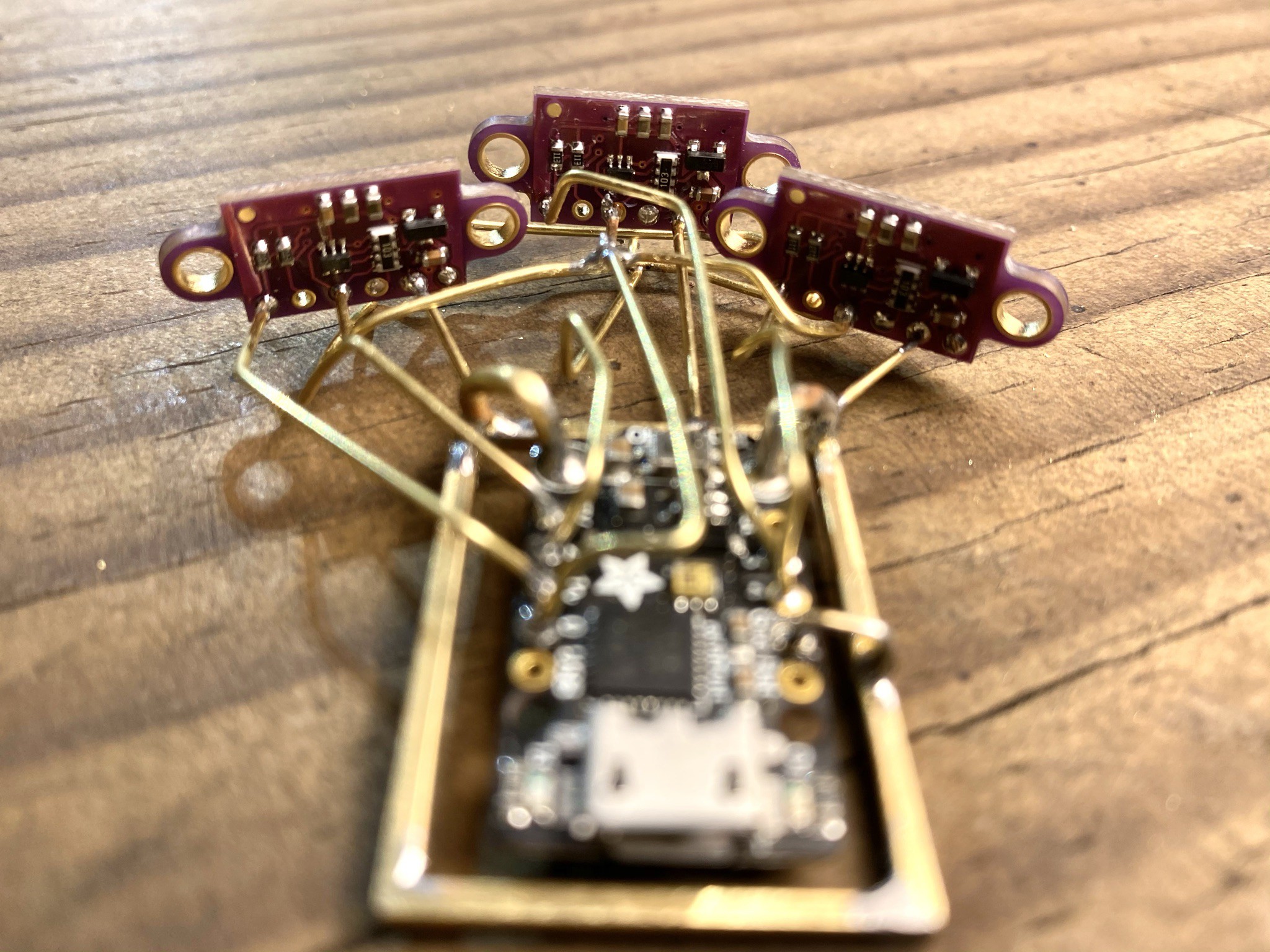
CircuitPython on the amazing Teensy 4.0 reads distance data from 3 lidar boards, outputs the data to the ssd1306 display and drives the car away from obstacles.


It's not a traditional Cordwood circuit where everything is packed together as tightly as possible to save space. However it spans several boards and I was trying to make it look like a car. The lidar boards being optical can't be stacked much more without interfering with each other.
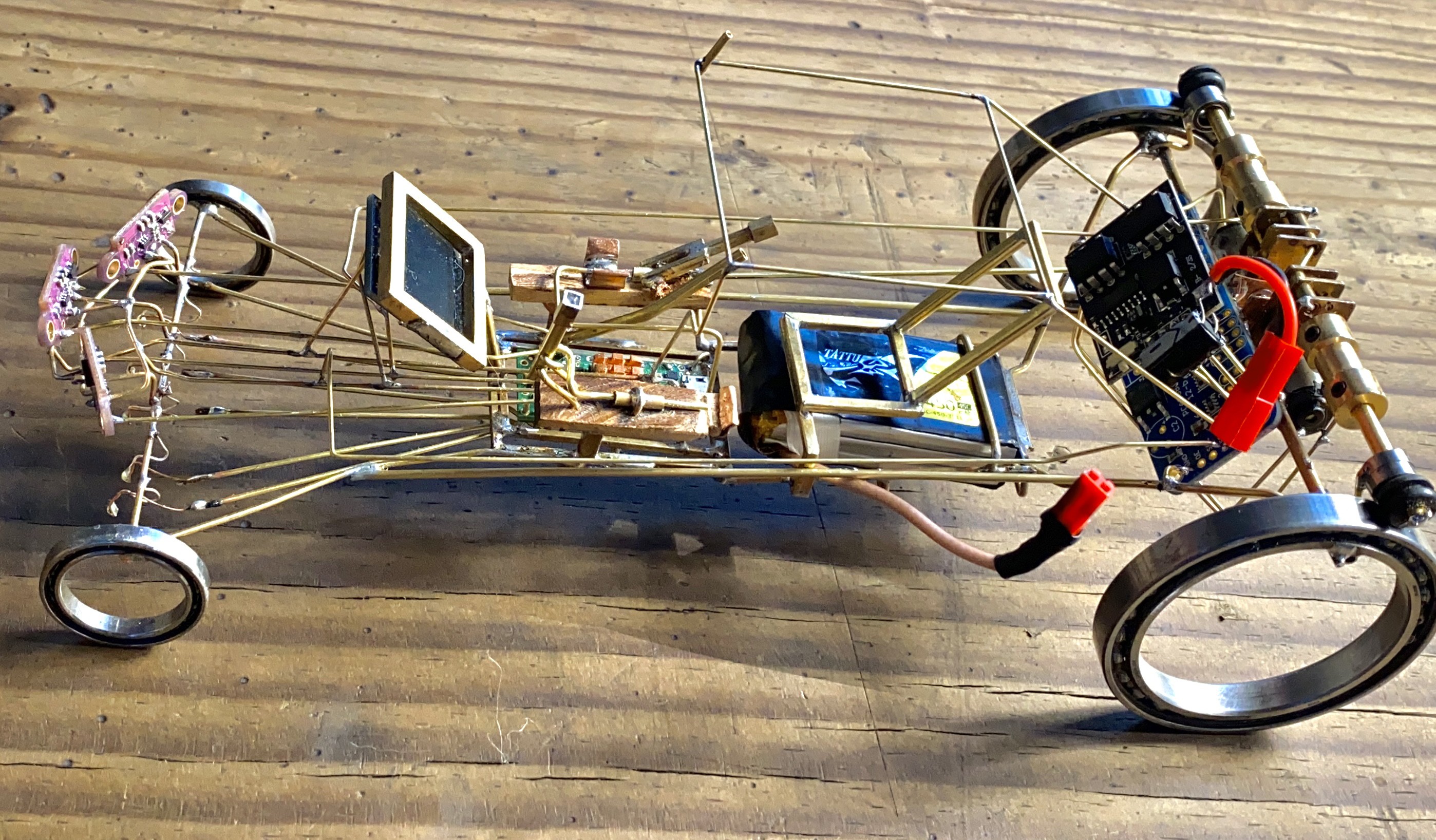
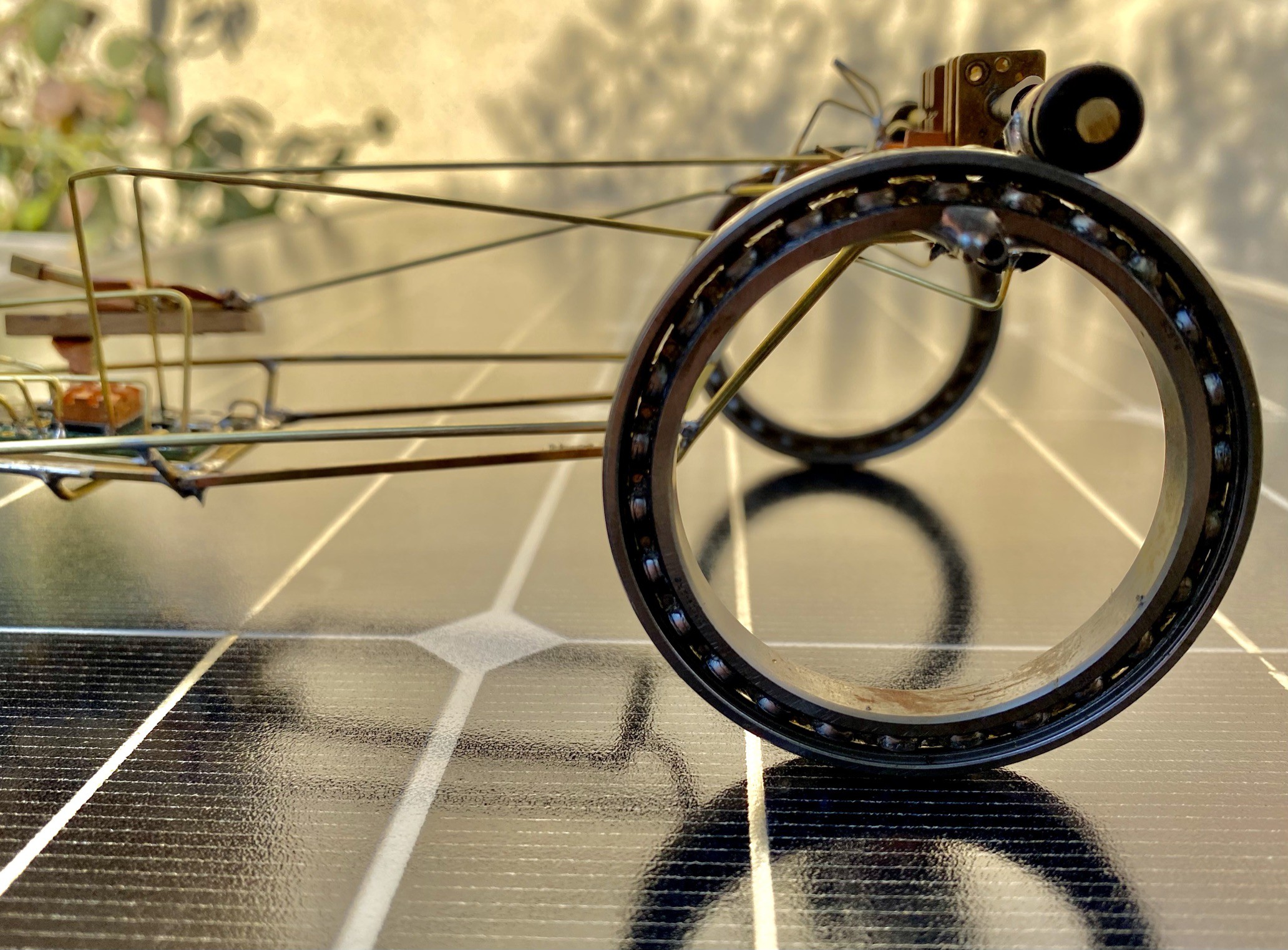
Incidentally, the wheels are some of the ball bearings you need to complete this Hackaday Project : Simple Cycloidal Robot Leg for Quadruped by Paul Gould which I just made and works wonderfully.
Originally, I started by having the lidar and display run by a Adafruit Trinket M0 at 8MHz. The speed was usable but it was just too small to run the 3 lidar boards and the display at the same time. I wasn't able to load all of the needed libraries and the Trinket M0 CircuitPython doesn't have terminalio so no built-in font. With 40k storage, there wasn't enough space for the program, all the dependencies and a font. Maybe with some tweeks it could work on the Trinket because it was really close.
Failed Trinket M0 attempt:
No issues of that kind with the 1MB, 600MHz Teensy 4.0. CircuitPython 6.0 was recently released and has been working great with the mu editor. . There is more functionality available by using the Arduino IDE as it's been around so much longer, but CircuitPython is way easier with many modules available.
Uses the CircuitPython 6.0.0-rc.0 Firmware and the CircuitPython 6 Libraries.
Teensy 4.0 is programmed using the Arduino IDE with the Teensyduino add-on:
Here's the bare Teensy with a grounded frame before installing it into the car:
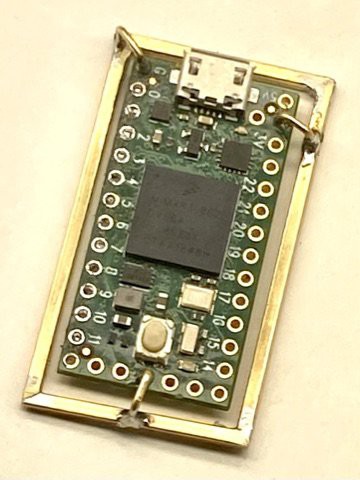
Bare Frame - original motors weren't 3s compatible so went like the dickens but only for a little while.

The Steering Wheel is a FPV camera with it's mini base-station.

The seat is the battery holder.

 David L Norris
David L Norris
 Gabriel F
Gabriel F
 Aaron
Aaron