Gaultier Lecaillon
Gaultier Lecaillon-
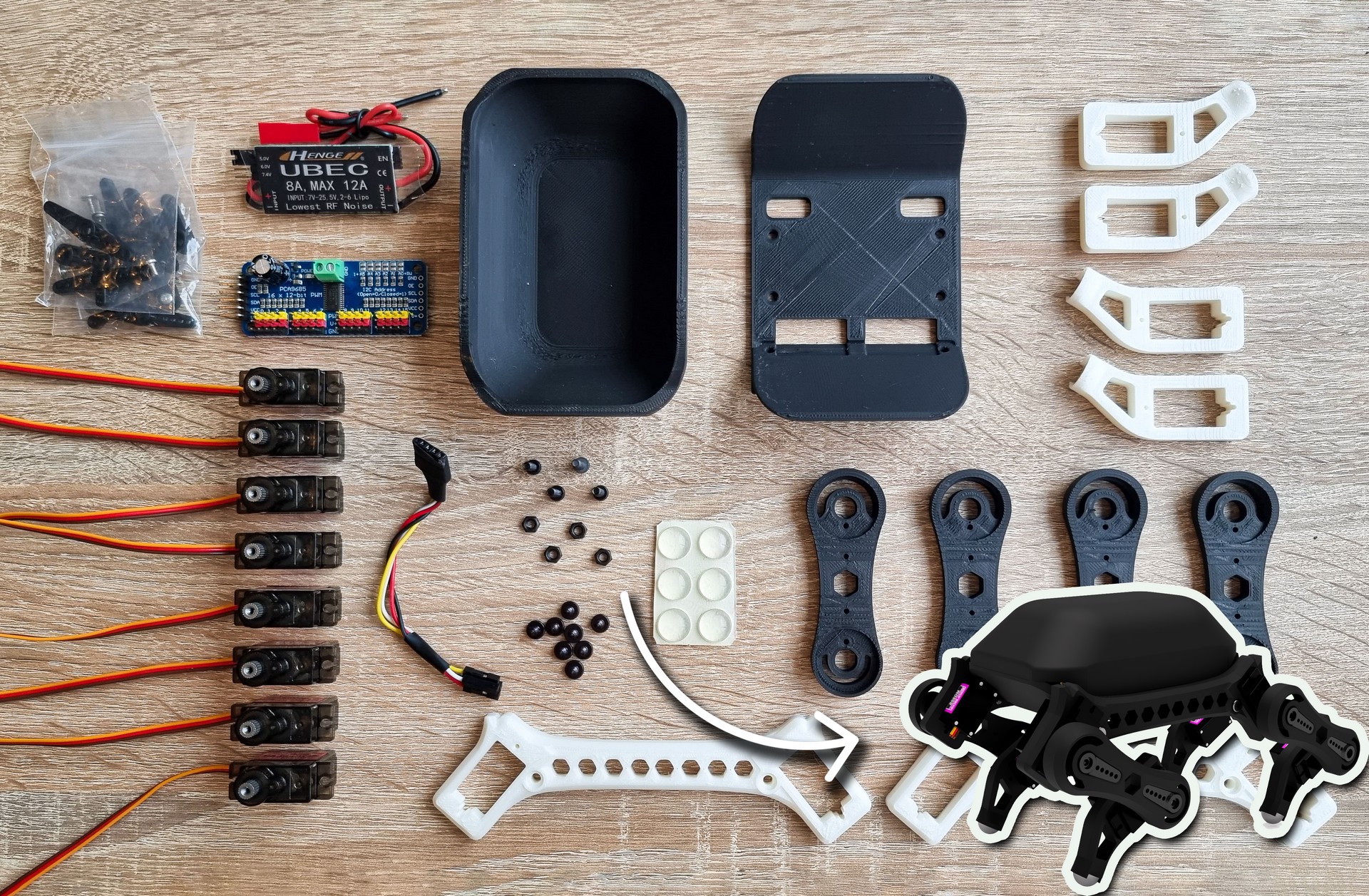
Some Pics
11/11/2023 at 09:22 • 0 comments![]()
![]()
![]()
![]()
![]()
-
Demo Servo Controller python
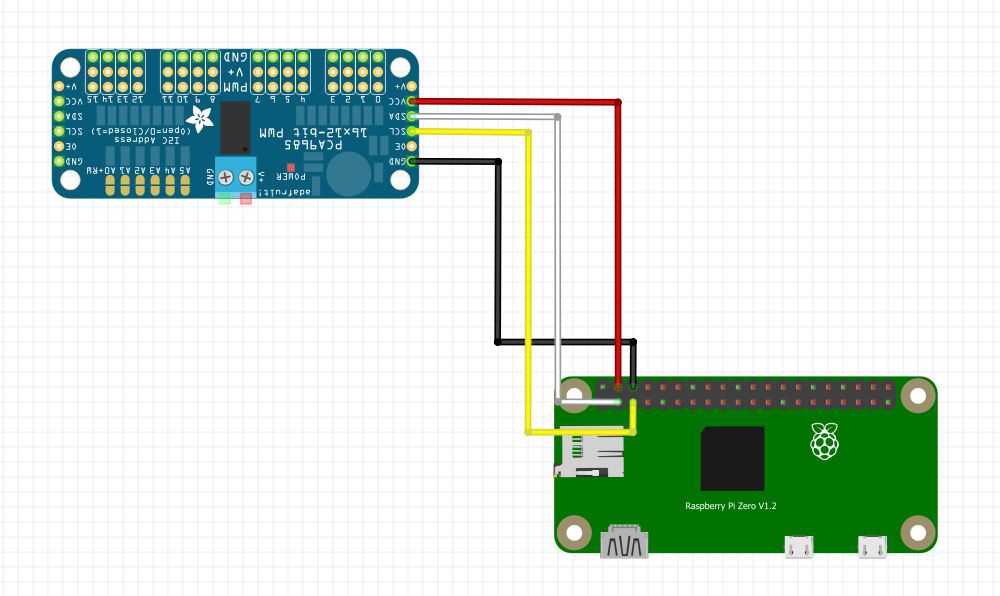
07/16/2021 at 20:48 • 0 commentsPlease find below the wiring diagram in order to correctly use the Driver Servo - PCA9685 16' with the I2C. You also need to power up the board and raspberry with a 5v and at least 3A (They can share the same input voltage)
![]()
Simple code example to set all 8 servo to the angle 50° (note that the angle need to be: 0 < angle < 180)
from adafruit_servokit import ServoKit kit = ServoKit(channels=16) for i in range(0, 7): kit.servo[i].angle = 50 -
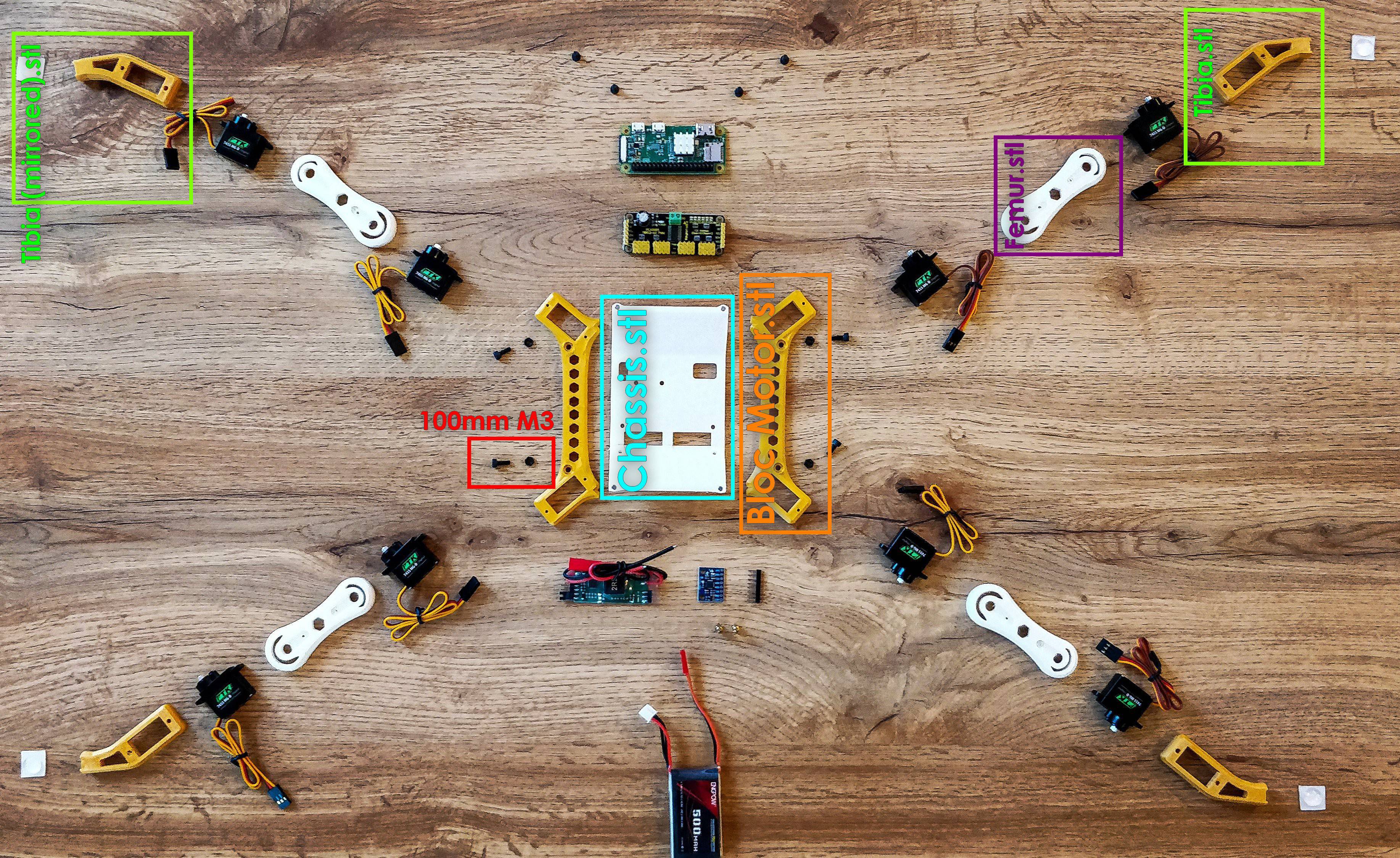
STL Files released 16/01/2021
07/16/2021 at 20:25 • 0 commentsI finally uploaded stl parts online for Edog !
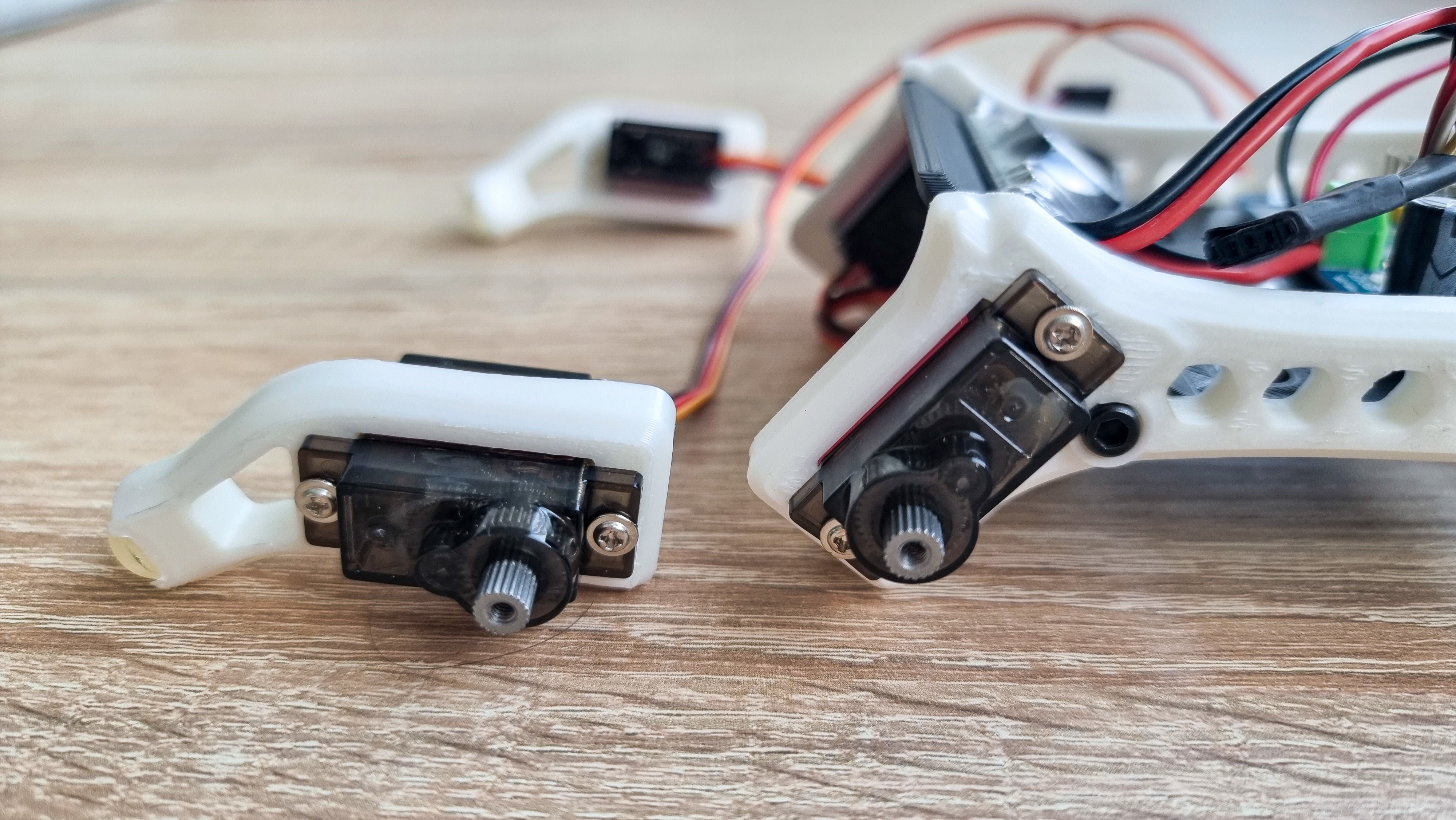
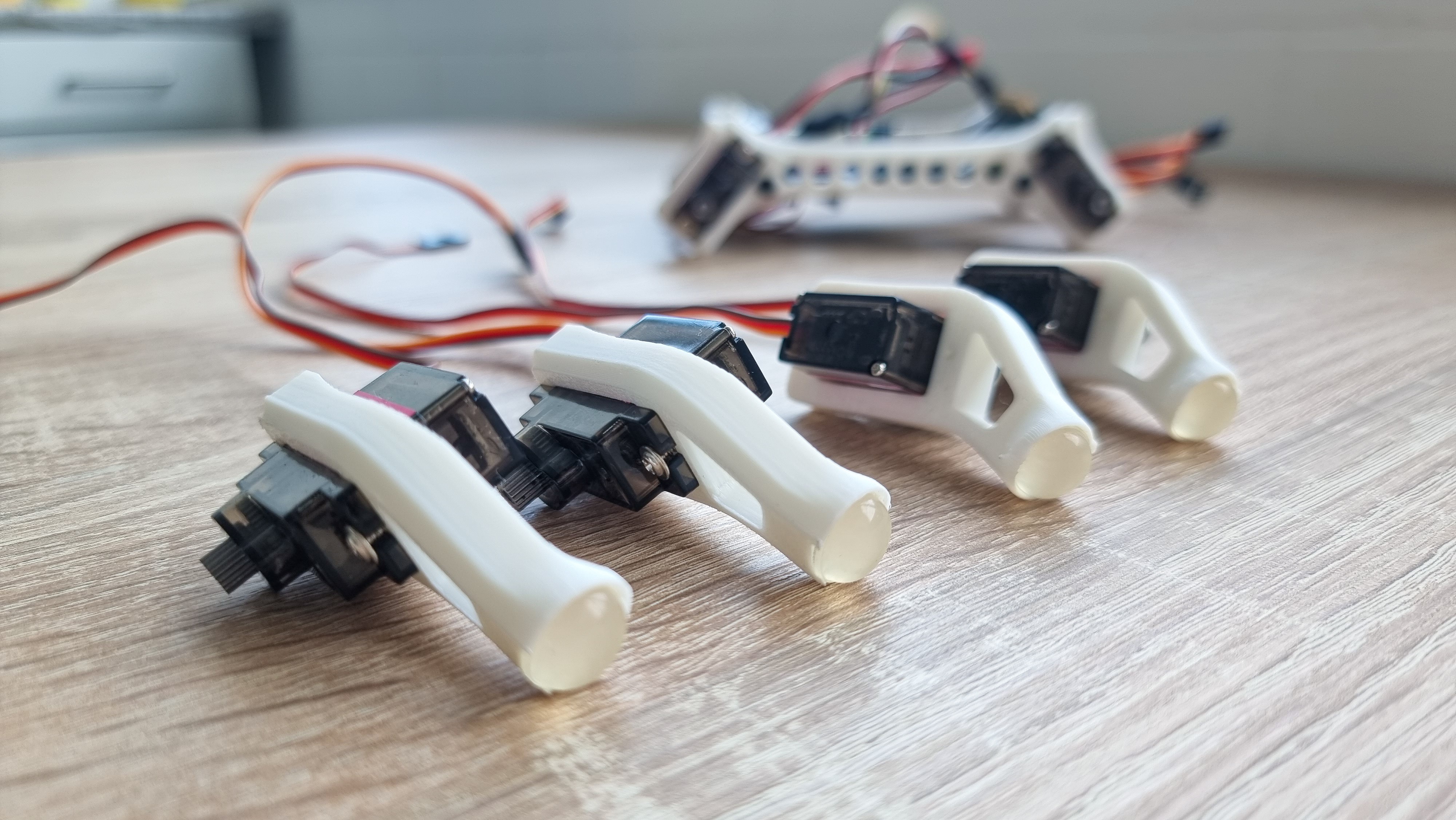
Prints are extremely simple, you don't need any support if you set the "support overhang angles" to 51°. The only trick is to print two "tibia" mirrored in order to print left and right tibia, the femur is already symmetrical and can be printed 4 times.
Download link: https://www.thingiverse.com/thing:4910279![]()
PS: I didn't publish the shell, I'm not satified by the shape, I will uplaod it later :) -
Next Tuesday, Eurobot 2021 Cup will begin !
07/02/2021 at 13:44 • 0 commentsI am very excited about my third participation in the competition, I have no doubt that my robot will be the smallest of all team and maybe the only quadruped 🙃
Here is the video I made with my former team Evolutek in 2019:
My goal is obviously not making many points but challenge the edog design to see if he can adapt in different environment and have feedback from other roboticist and engineer -
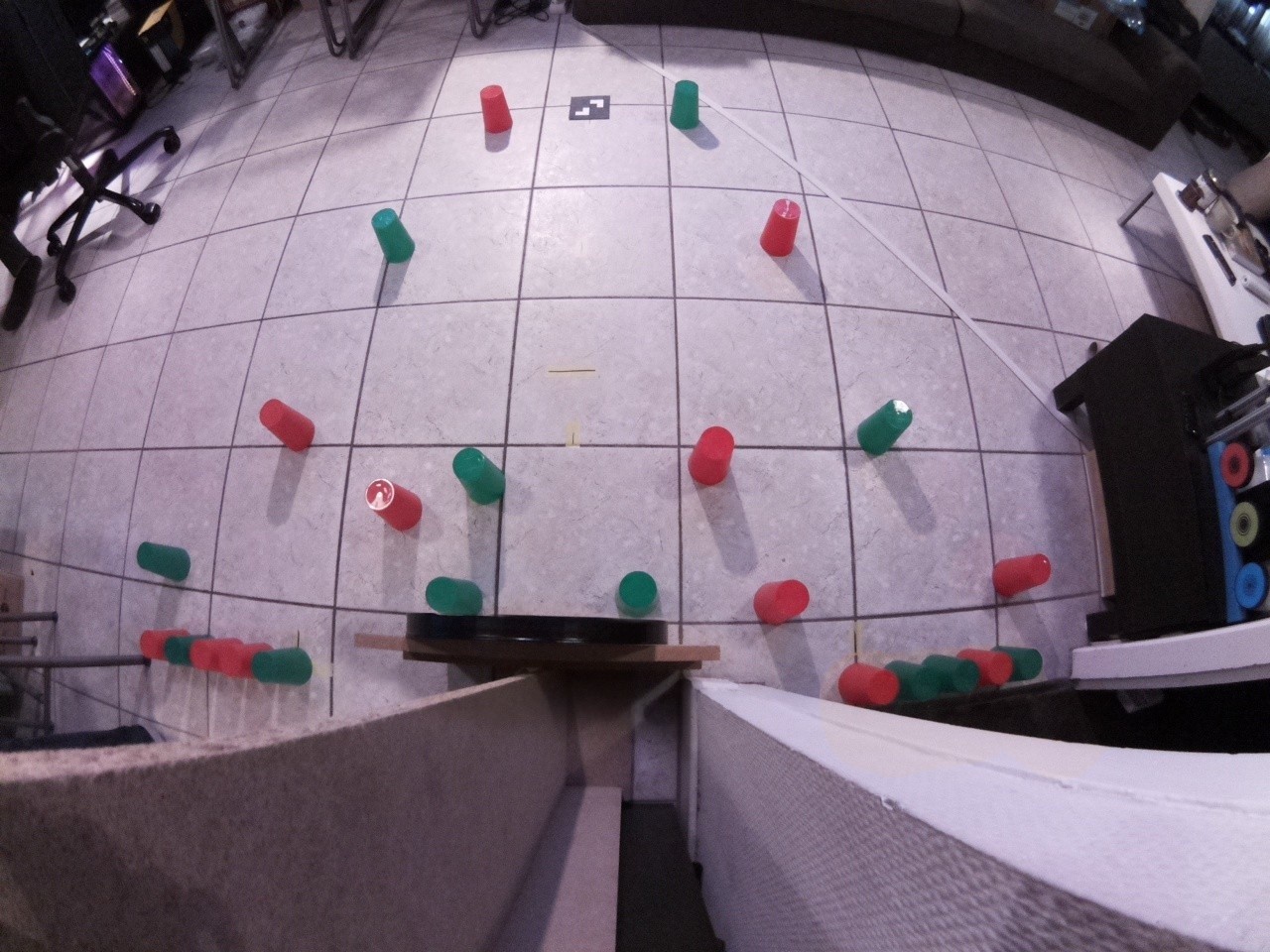
Beacon Controller
02/14/2021 at 11:53 • 0 commentsAs explain, edog will participate in the Eurobot cup.
To do so, I need to know the robot position in (x, y) on the table. But I can't use embedded lidar or using triangulation due to its small size and its limited capacity to carry heavy components.
So What I will attempt to do is using a beacon with a camera and estimate the position giving a video flux.
![]()
This beacon is composed with an NVIDIA Jetson Nano 2gb board, a TPLink Nano Router, a 7inch touchscreen and a DC converter to 5v and 5A. that allow to used 3s to 6s lipo to power up the sytem.
![]()
Here an exemple of the team ARIG Robotique (more infos here)
Step #1: original video![]()
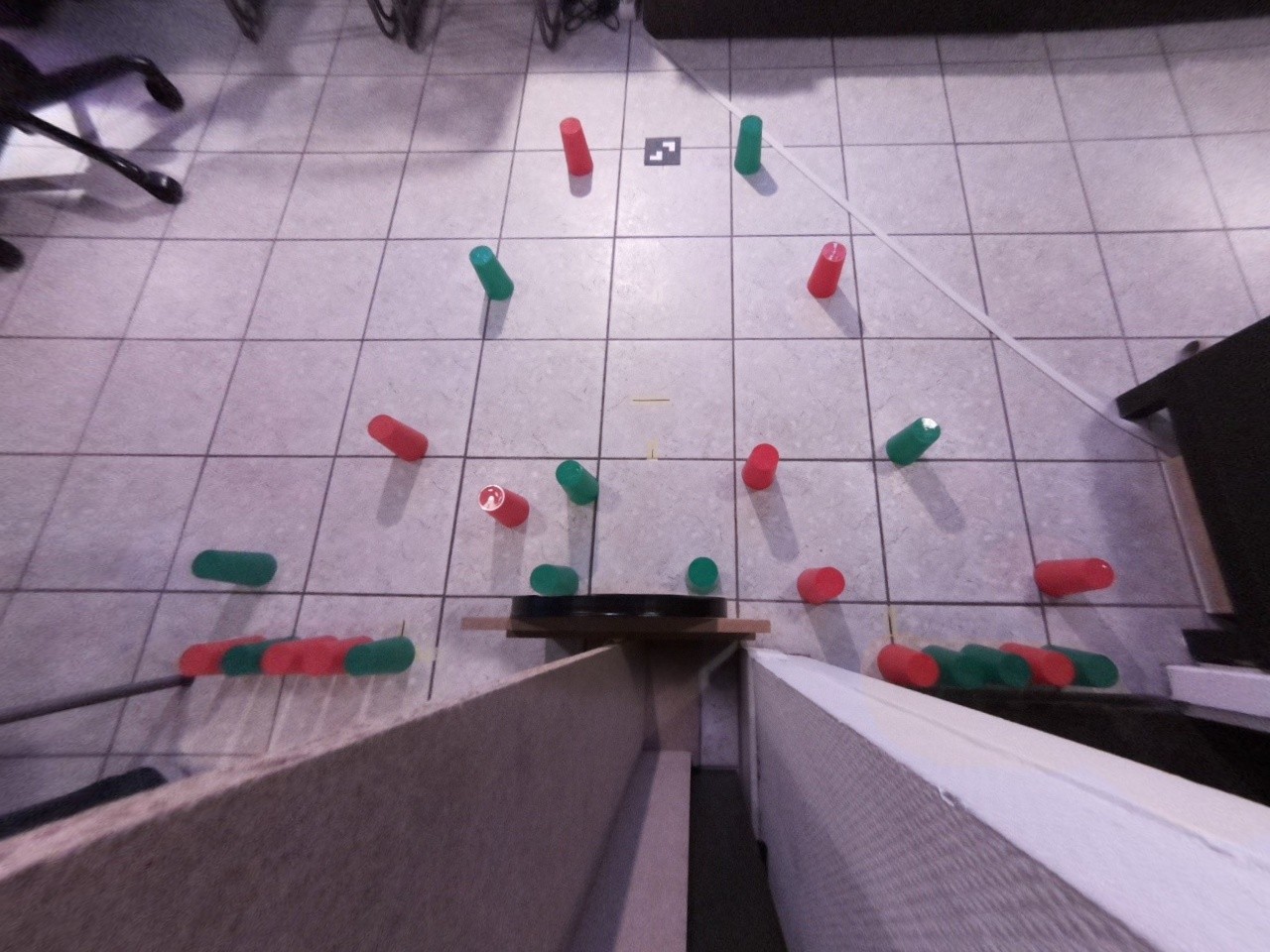
Step #2: Optical distortion usgin OpenCv in python
![]()
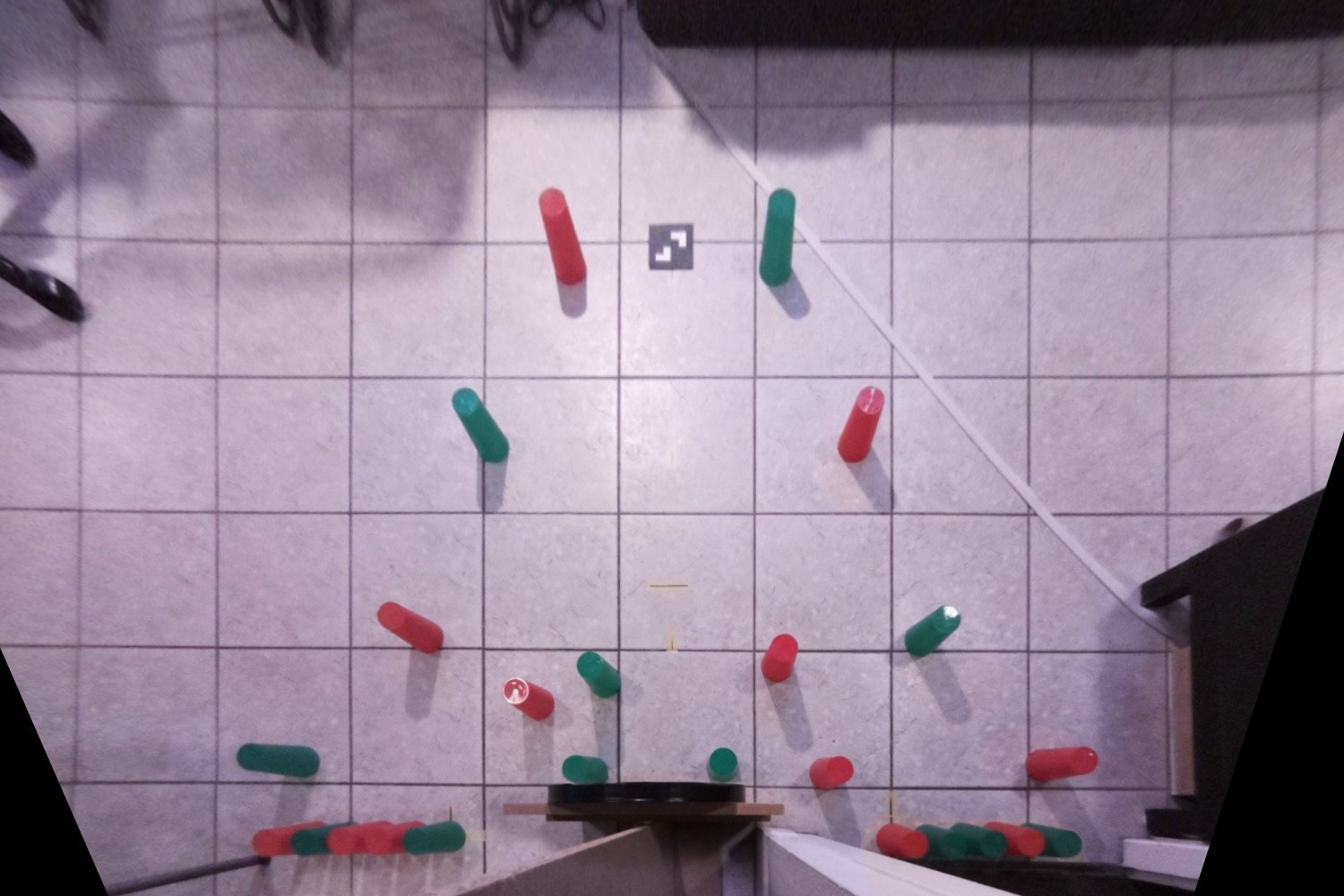
Step #3: projection in an orthonormal coordinate system
![]()
-
Exploded view of all edog components
01/31/2021 at 00:00 • 0 commentsAll the stl files will be drop after the French Eurobot cup, the 1st June 2021.
here you can see all the part involves, Everything has been design for an easy build and easy printed without support needed.
![]()
Only 4 * M3 screw are needed for the frame ! 🔩
It makes edog very simple to build, so everyone can build his own easely![]()
-
eDog Walking demo 31/01/2021
01/30/2021 at 23:40 • 0 commentsAll legs are controlled by an inverse kinematics algorithm. ROS2 will be implement soon !
Edog - Mini 3D printed Quadruped Robot ✨
Hi, I'm edog, a 3D-printable quadruped robot