 finallyfunctional
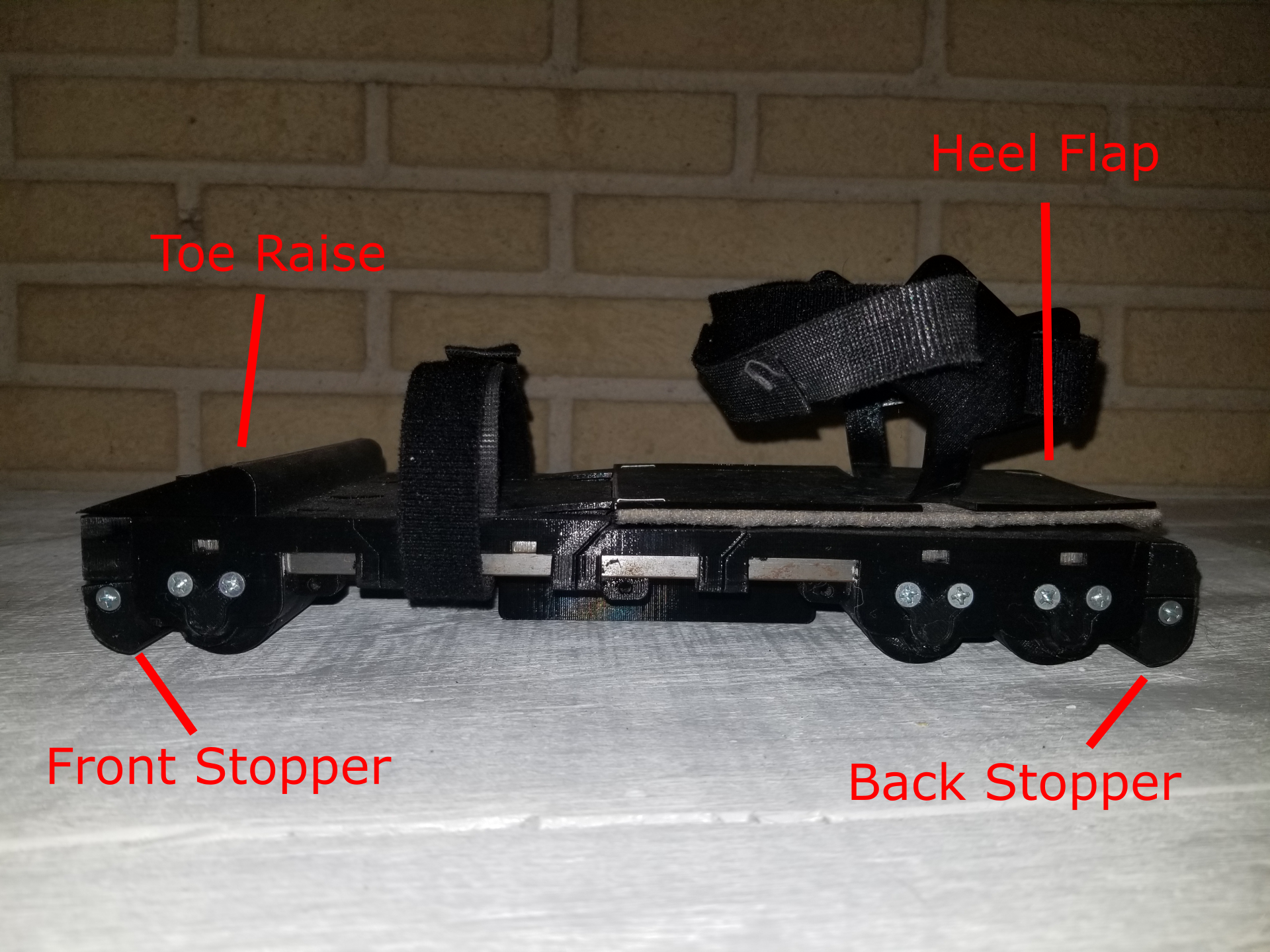
finallyfunctionalI'm making shoes that you wear while playing VR games. They negate your motion via motors or a rigid support rig to keep you in the same spot. The video above shows my passive VR shoes, which do not use motors. You push against the support rig to bring your feet back. The VR shoes have stoppers on the front and back that get pushed into the ground when you lift your heel or toes.
I've also made motorized VR shoes, shown in the below video. I am not working on motorized VR shoes at this time. I'm just working on passive VR shoes and that is the main focus of this project. The information here about the motorized VR shoes is just for those who are curious about how they worked.
FAQs
What are the specs and features?
You can read my overview of the passive VR shoes here.
How can I build these and how much do they cost?
Build instructions and BOM can be found here. Cost for materials is around $90-$120.
How do the motorized VR shoes work?
You can read all about the motorized version here.
Do you have foot tracking?
The motorized version did. I don't yet have foot tracking for the passive version but plan on adding it. With the passive version, for now I'm just pushing on the joystick on the controller. I've been gaming my whole life so pushing on the joystick doesn't require much conscious effort so I've been completely happy using the joystick.
These Look Dangerous
I'm wearing a safety harness. The shoes are also low enough to the ground where I'm confident they will not tip ('ve tried to get them to tip, they're stable).





 David Shamblin
David Shamblin