 Ricochetrj
RicochetrjUniversidad: Universidad del Valle de Guatemala
Curso: Robotica 1
Codigo: MT3005
Catedratico: Miguel Zea
Fecha de inicio: 20/01/2021
Estudiantes:
Gonzalo Palarea-15559
Rodrigo Figueroa-161678
Progreso: En Fase 4, Finalizado
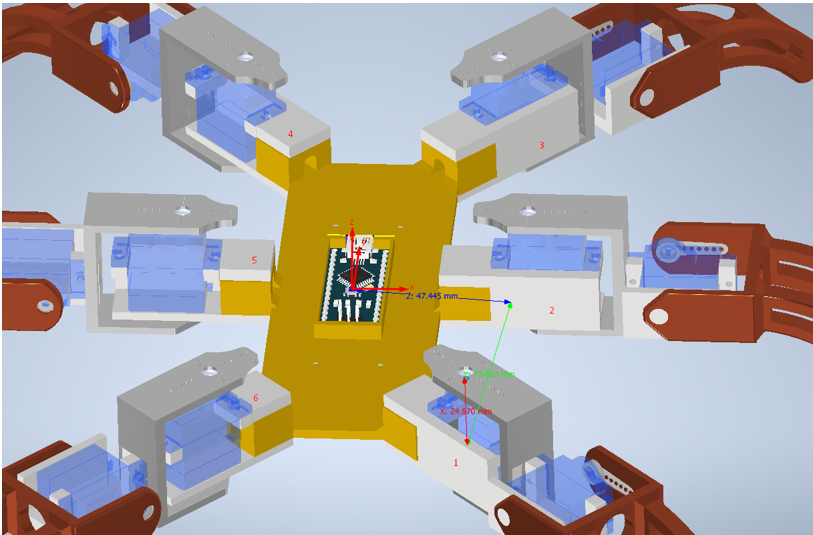
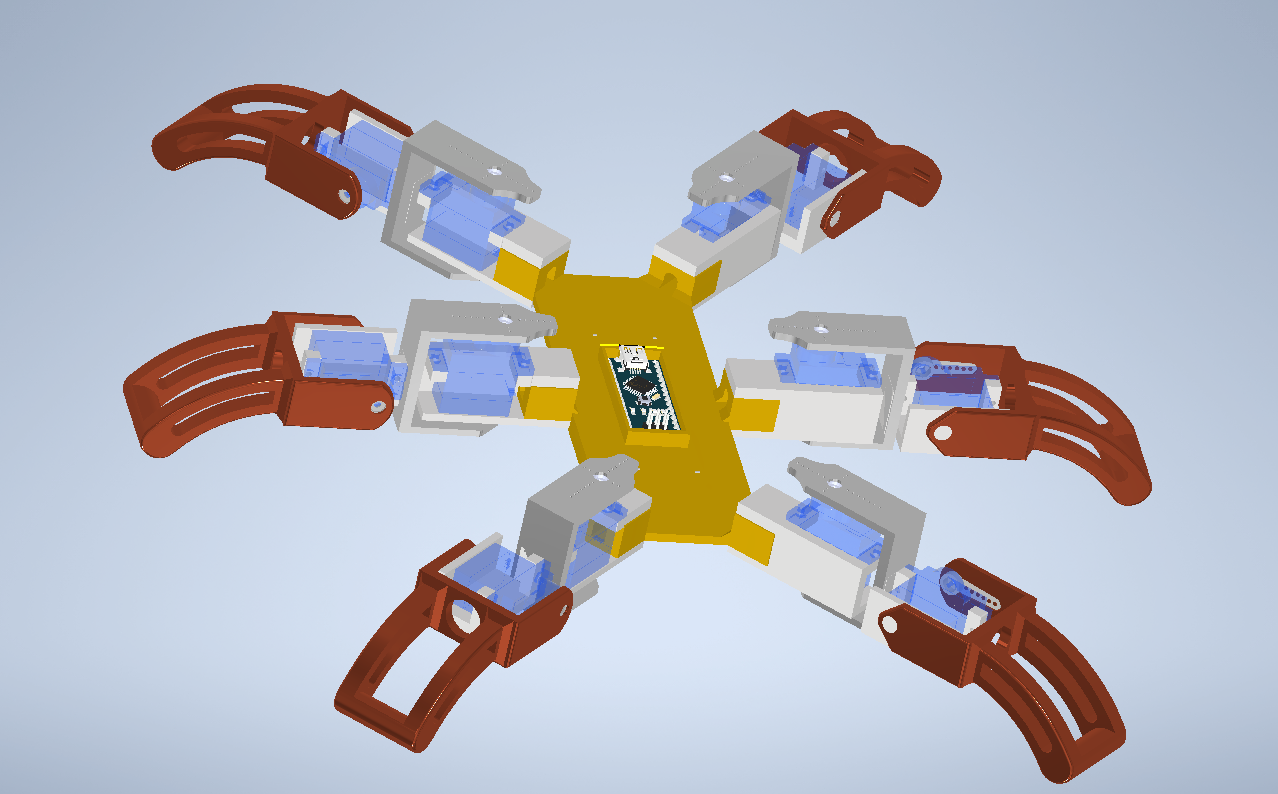
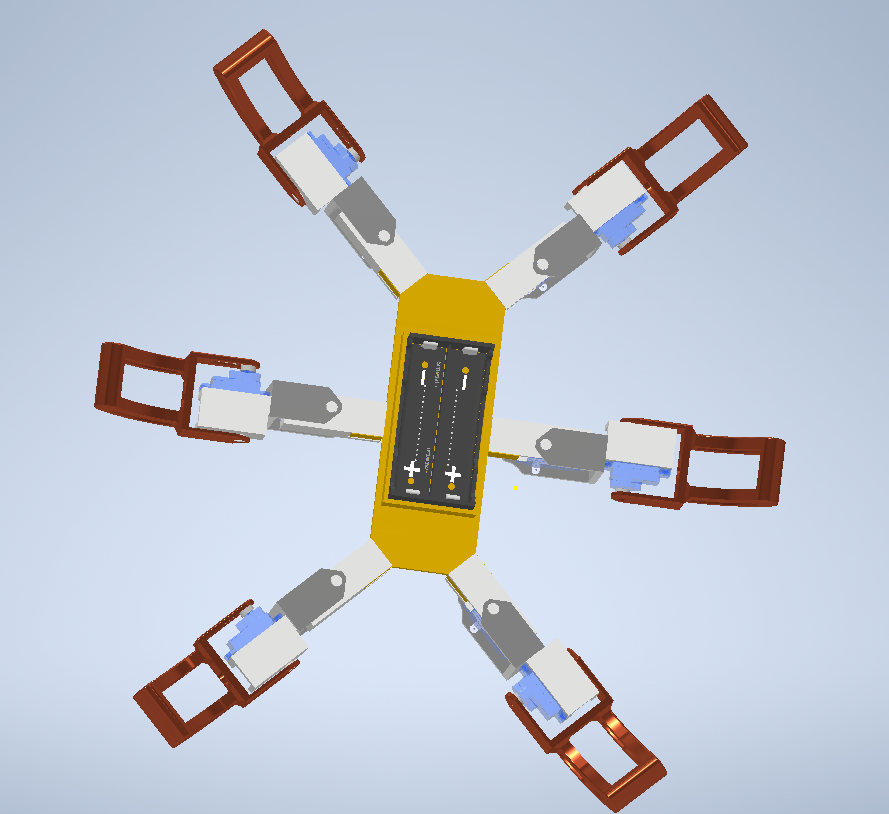
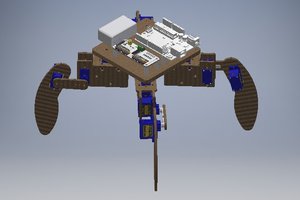
En este proyecto para el curso de Robotica 1 (MT3005) se nos pidio disenar nuestro propio robot movil a base de extremidades (no un robot movil con ruedas). Apartir de esto se nos pidio que eligieramos entre disenar un robot hexapodo (6 piernas) o un robot cuadrupedo (4 piernas). Luego se nos pidio que iniciaramos con el proceso de diseno y modelado de la estructura fisica del robot, asi como la seleccion de actuadores (servo-motores), el sistema de potencia (las baterias, los reguladores de corriente y voltaje) y el sistema de control (microcontrolador). Posteriormente, con la ayuda de la herramienta de simulacion de WeBots vamos a disenar el programa que ejecutaria el microcontrolador que se encargaria de manejar los movimientos de los diferentes actuadores.
Este Proyecto se llevara acabo en diferentes fases:
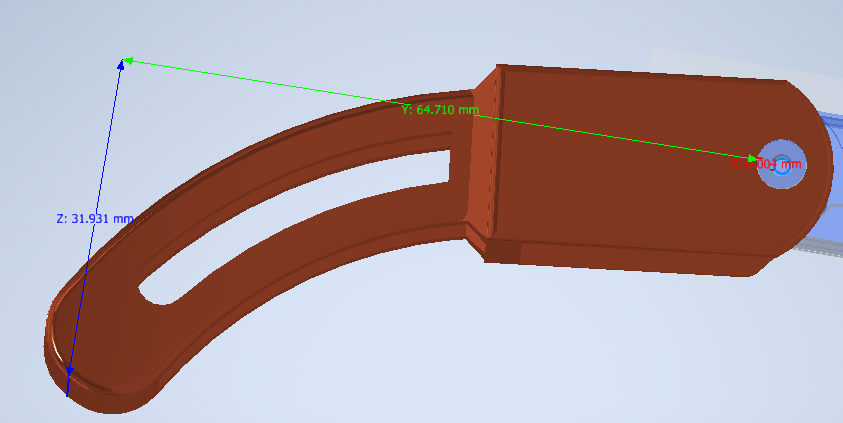
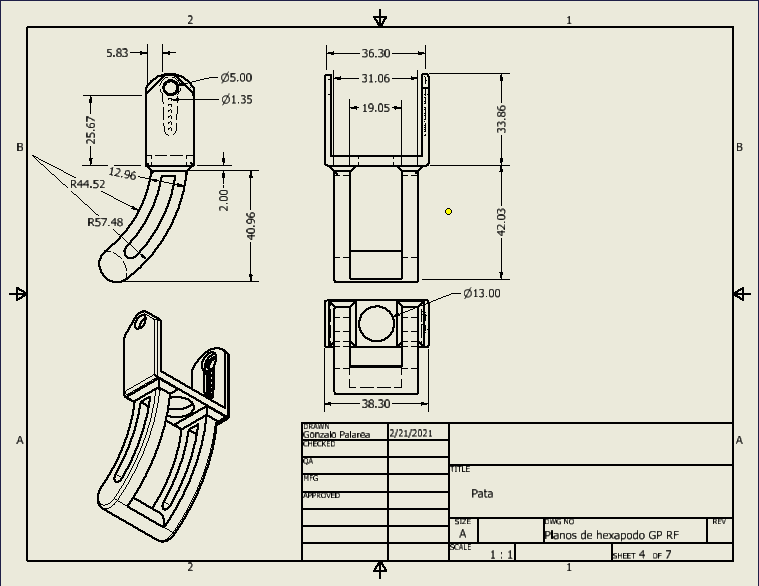
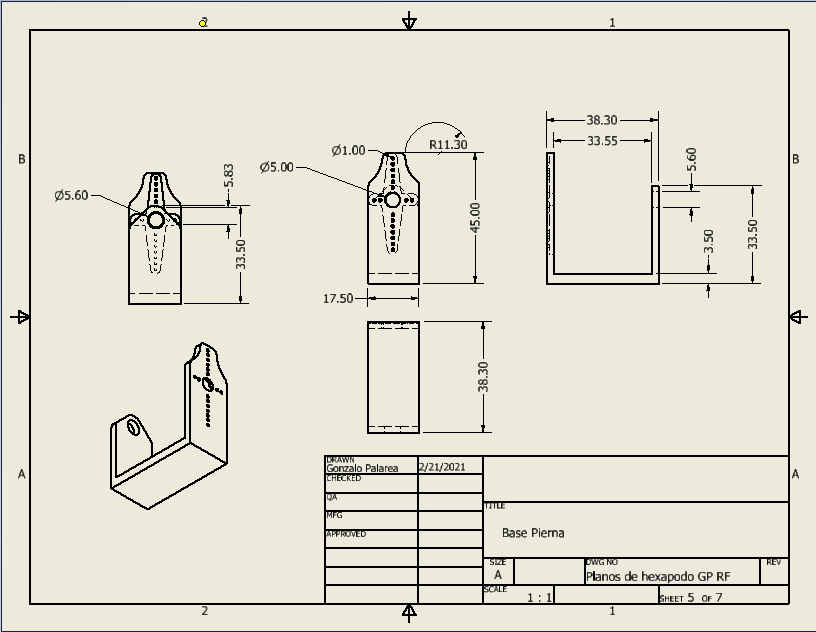
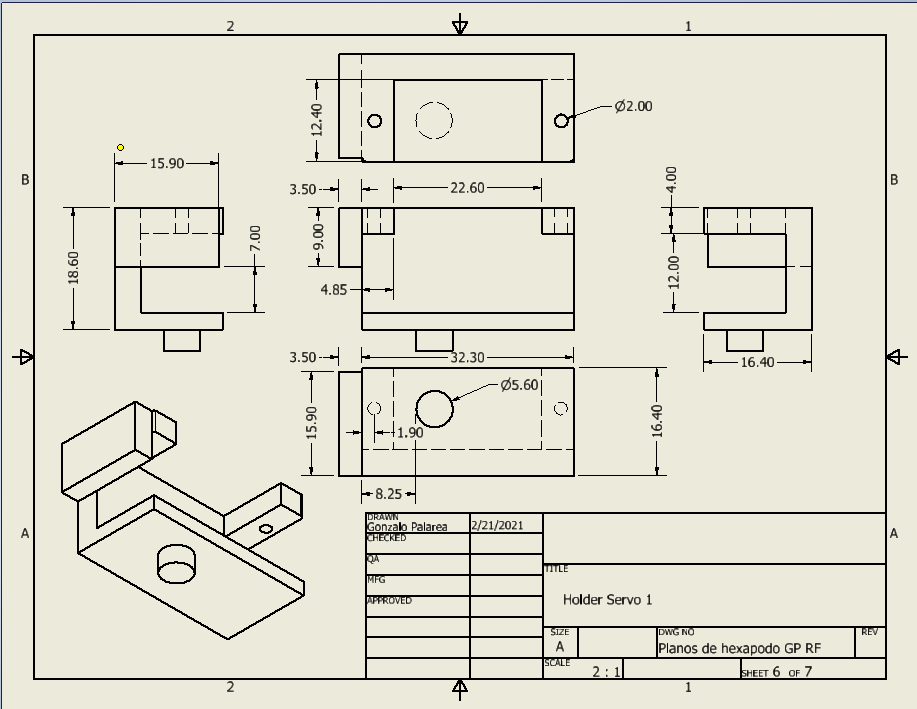
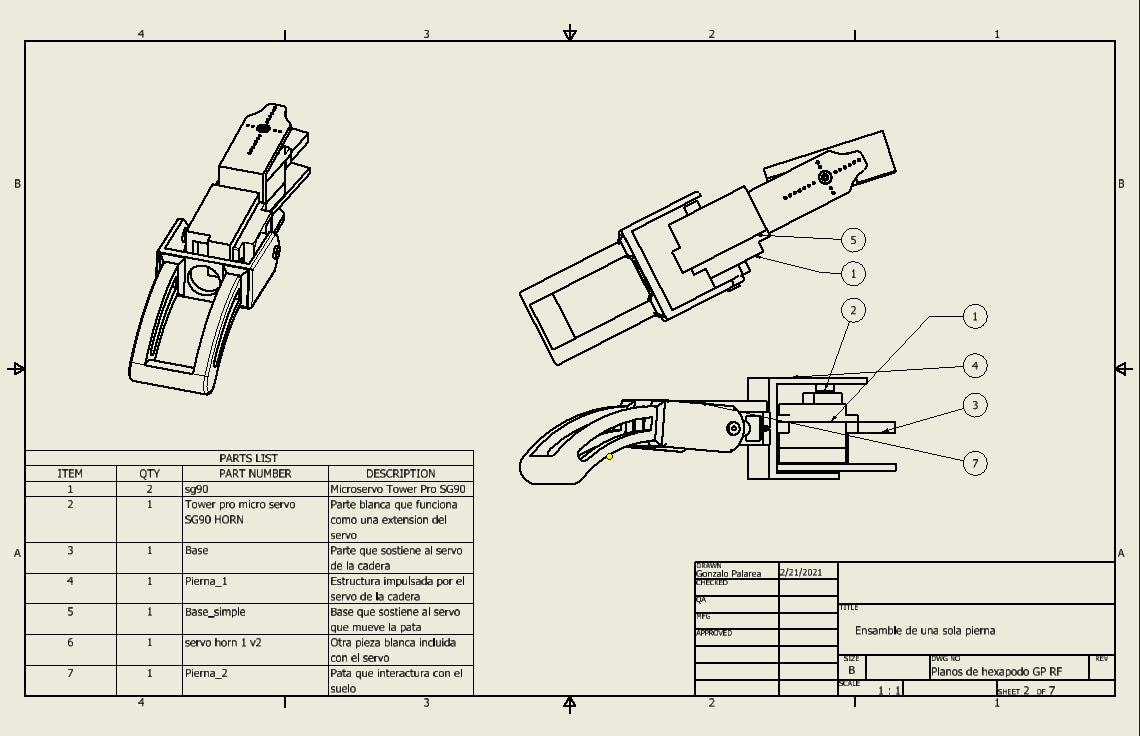
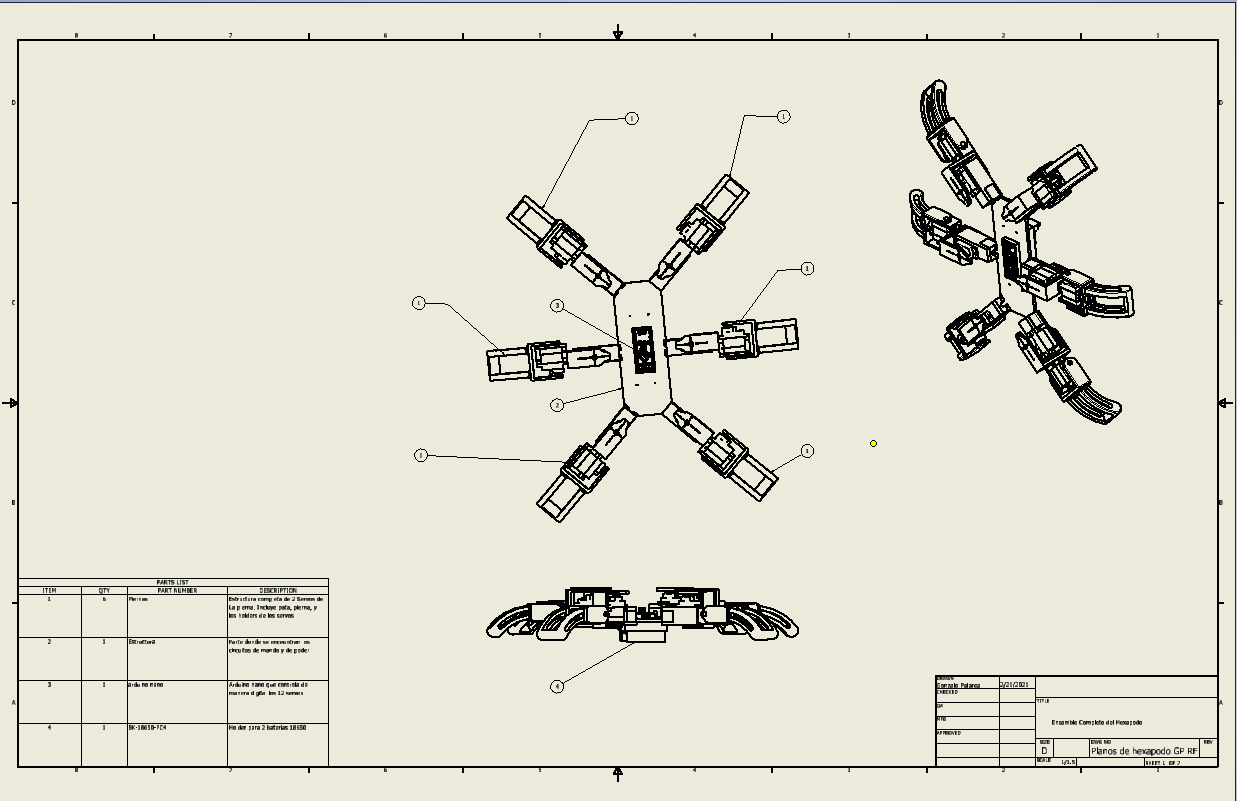
Fase 1- Modelado 3D, Seleccion de Materiales y validacion de calculos preliminares de torques y fuerzas minimas.
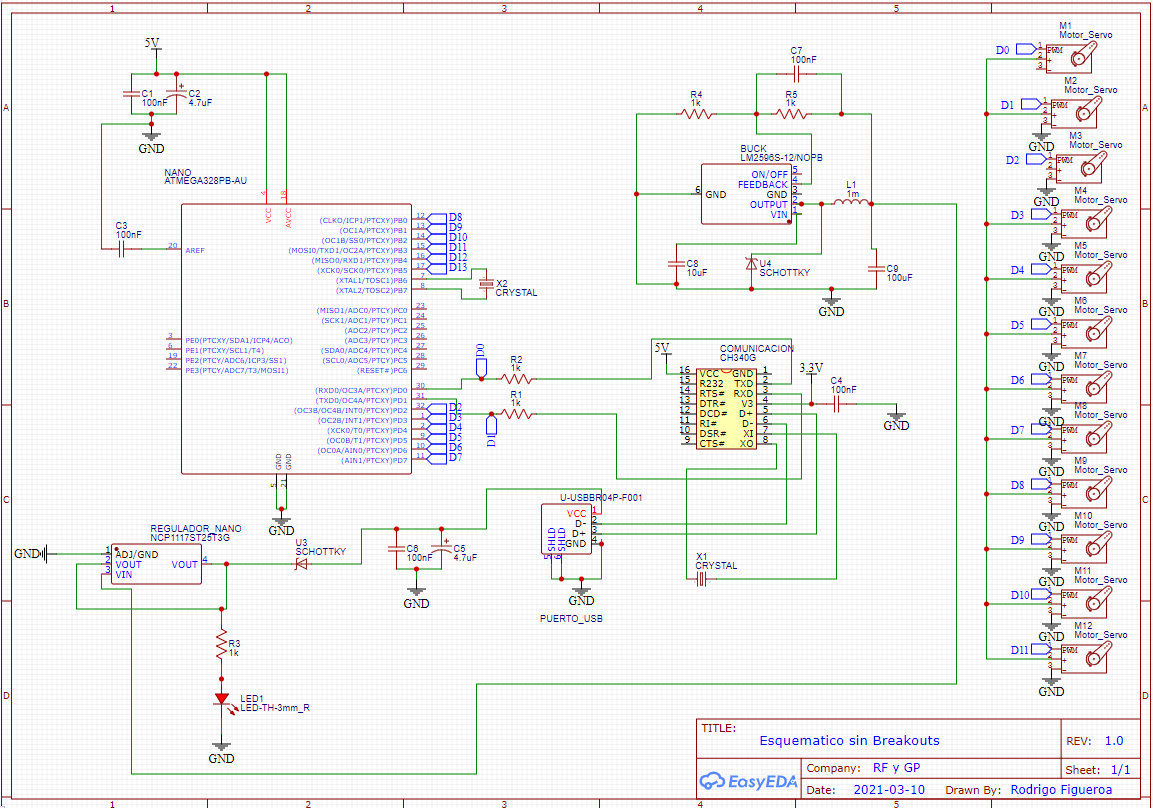
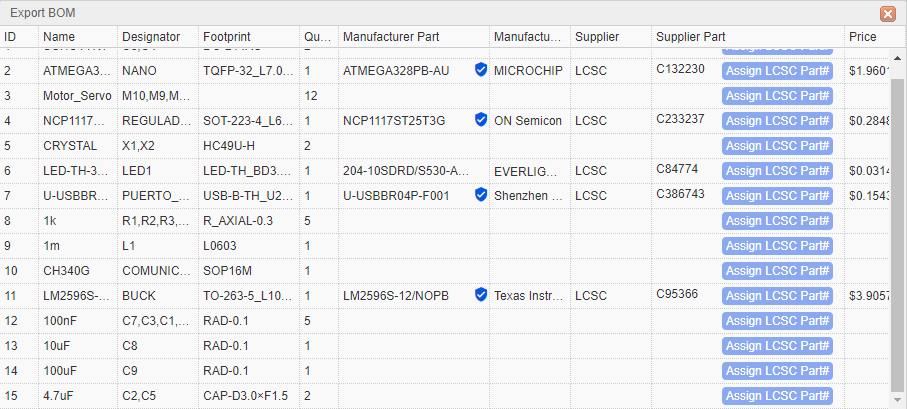
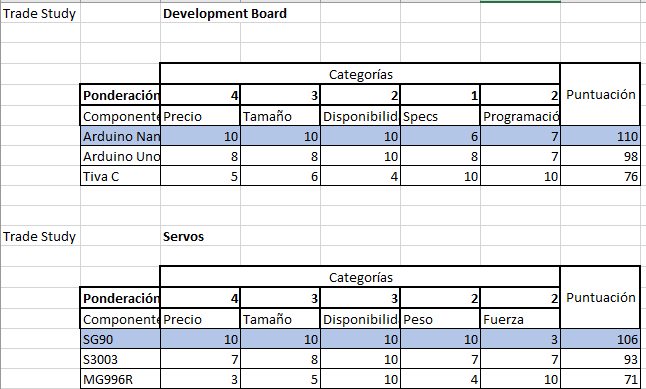
Fase 2- Seleccion de Componentes, Trade Study, Esquematicos, Bill of materials (BOM), Power Buudget y Validacion de fuente de potencia
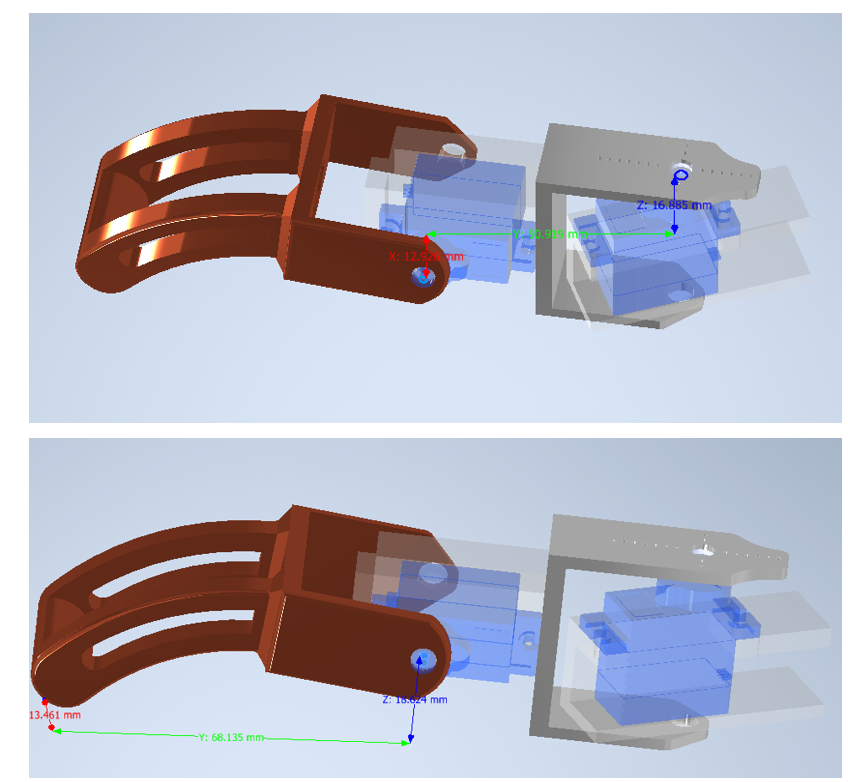
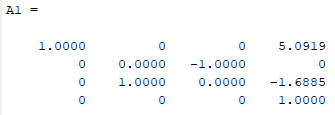
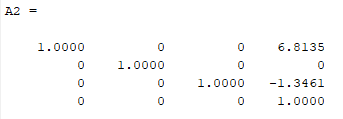
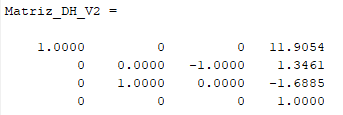
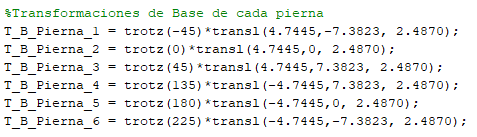
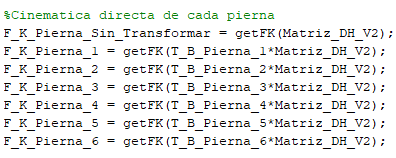
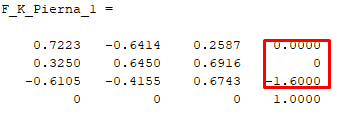
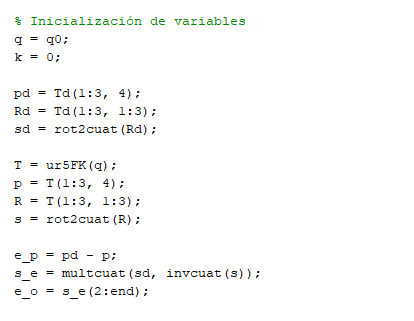
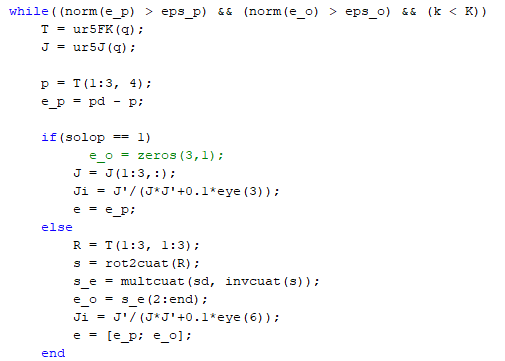
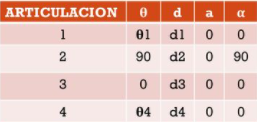
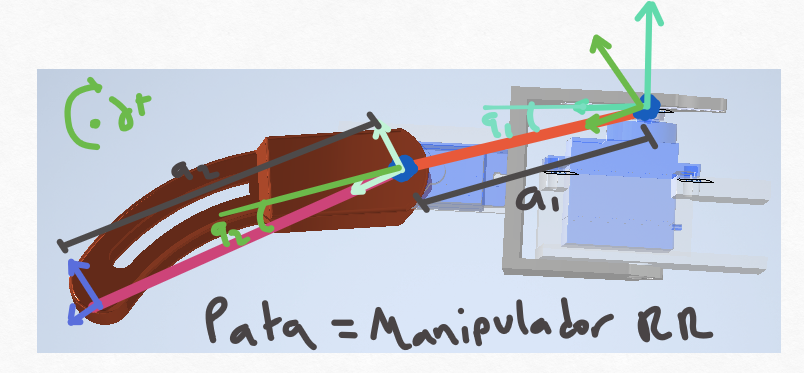
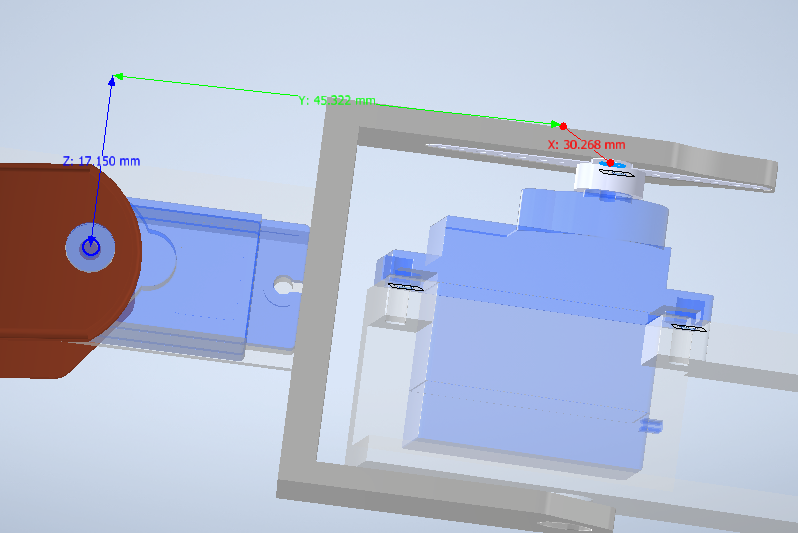
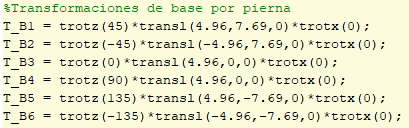
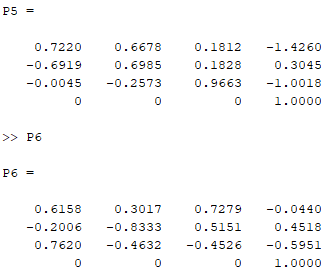
Fase 3-Matrices de parámetros de Denavit-Hartenberg y transformaciones de base, Rutinas de cinemática directa, diferencial y cinemática inversa, Visualización de la cinemática del robot.
Fase 4- Video del funcionamiento completo del robot, Detalle sobre la generación y ejecución de trayectorias

















 PabloCastillo17348
PabloCastillo17348
 guilldeas
guilldeas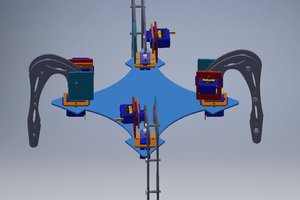
 vel17075
vel17075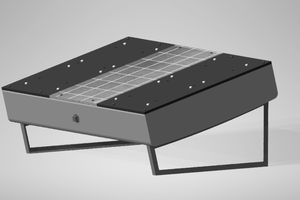
 danfer adrian
danfer adrian