 vel17075
vel17075¿Por qué el diseño seleccionado?
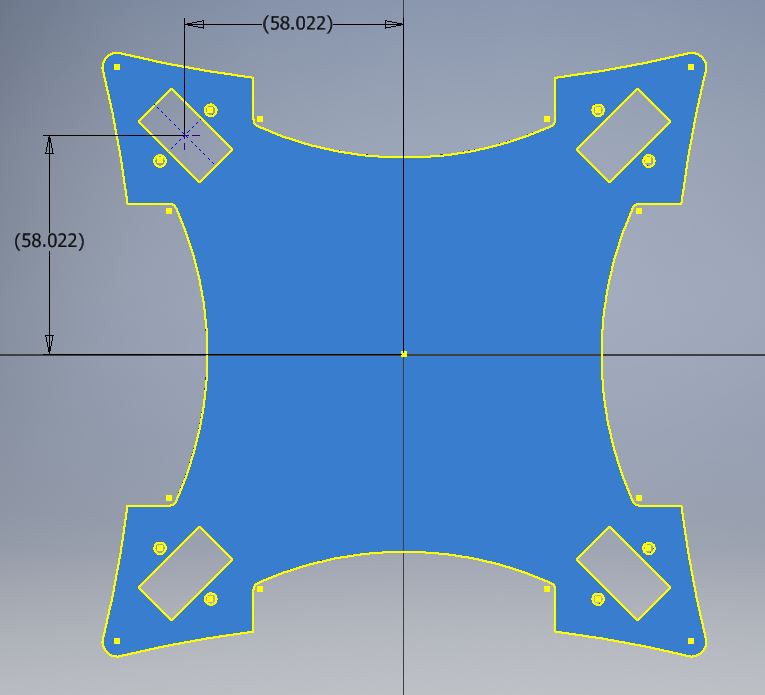
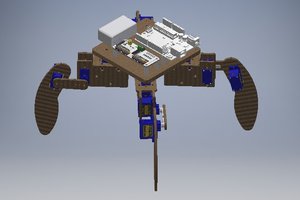
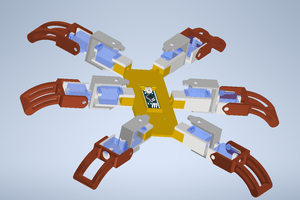
Entre los dos tipos de robots cuadrúpedos que hay (inspirado en mamíferos o en insectos) se decidió uno inspirado en insectos. Esto es debido a que los robots inspirados en insectos tienden a tener una base simétrica y suelen elevarse a pocos centímetros del piso. Esto permite que el centro de masa del robot se encuentre en un punto bajo mientras avanza, y que sea más difícil que caiga por alguno de sus laterales.
En general, los cuadrúpedos inspirados en insectos tienen 12 grados de libertad (o DOF, por sus siglas en inglés), teniendo 3 motores por cada pata.
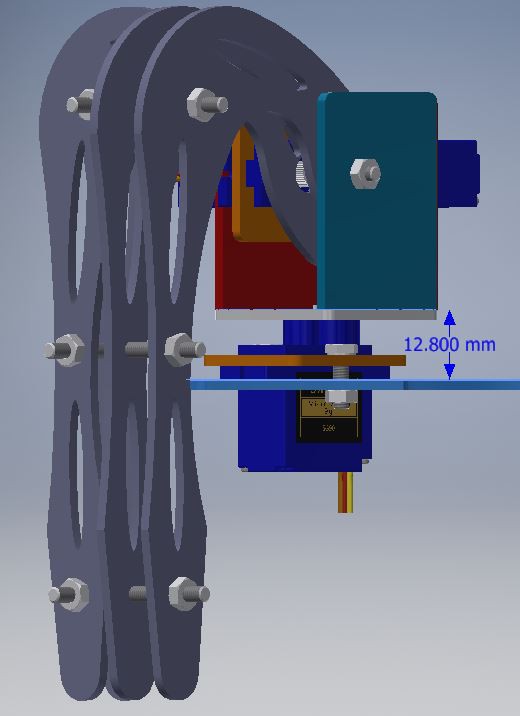
 En esta aplicación, se trata de ecomomizar lo más posible. Tomando como base el documento "Development of an 8DOF quadruped robot and implementation of Inverse Kinematics using Denavit-Hartenberg convention", se estableció que es posible trabajar un robot cuadrúpedo con un mínimo de 2 motores por pata, haciendo un total de 8 DOF. Con esto se espera que los brazos tengan una rotación respecto al eje vertical y otro para rotación horizontal.
En esta aplicación, se trata de ecomomizar lo más posible. Tomando como base el documento "Development of an 8DOF quadruped robot and implementation of Inverse Kinematics using Denavit-Hartenberg convention", se estableció que es posible trabajar un robot cuadrúpedo con un mínimo de 2 motores por pata, haciendo un total de 8 DOF. Con esto se espera que los brazos tengan una rotación respecto al eje vertical y otro para rotación horizontal. 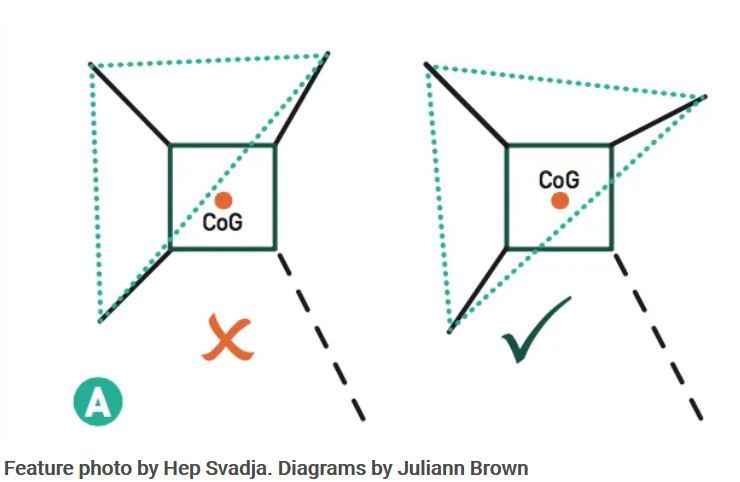





 PabloCastillo17348
PabloCastillo17348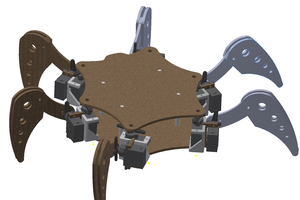
 Ricochetrj
Ricochetrj