Justificación del diseño
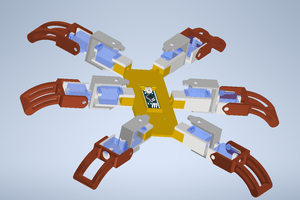
El diseño está basado en un insecto por lo que se utilizo un hexapod con el objetivo de mantener la estabilidad asegurando que siempre haya como mínimo 3 puntos de apoyo.
Se opto por utiliza nada mas 2 grados de libertad, esto con el objetivo de reducir el peso del robot ya que se utilizan menos motores. Como se muestra en el siguiente link se puede lograr un movimiento bastante fluido con tan solo 2 grados de libertad. Al agregar uno mas se puede lograr un mayor control del mismo, pero esto se compensa con el diseño mecánico del robot.
 Ricochetrj
Ricochetrj
 gustavoriverag
gustavoriverag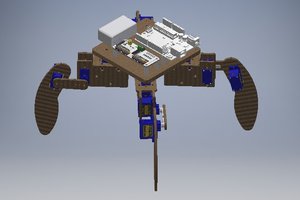
 PabloCastillo17348
PabloCastillo17348