0%
0%
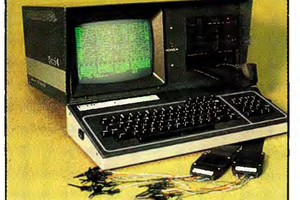
Vintage Z80 palmtop compy hackery (TI-86)
It even has a keyboard!
 Eric Hertz
Eric HertzBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 TEC.IST
TEC.IST
Hey, I have a TI-83+ set aside if you want it. Water damage, does not turn on. I'm not sure what the fault is, I've been through it but nothing leaps out at me.
IDK if it's useful or not but if you want it, sometime early Feb I'll toss it your way in a bubble mailer. I still have your info IIRC.
Want?