 Afreez Gan
Afreez GanOutline:
- Project Status
- Problem
- Solution and Product
- How to buy it?
- What's Mini Pupper's value?
- Open source: DIY what your custom robot dog
- Software custom
- Hardware custom
- What’s More
- ROS: A Dynamic System that You Can Keep Developing
- SLAM
- Navigation
- AI: OpenCV
- Open source: DIY what your custom robot dog
- Why does Mini Pupper Stand Out?
- How to use it?
- How to Build?
- About us
Project Status
Mini Pupper v1 was launched in 2021, and v2 was launched in 2022. Very much appreciate many volunteers' contributions to the open source project. Connect with us via Discord, FaceBook, YouTube, Twitter.
Mini Pupper will make robotics easier for schools, homeschool families, enthusiasts, and beyond.
- AWS LLM(large language model) service can be built-in and released at the workshop of AWS re: Invent, NOV. 27 – DEC. 1, 2023 | LAS VEGAS, NV.
- ROS: support ROS 1 and ROS 2 SLAM&Navigation.
- OpenCV: supports 3D camera module and single camera module.
- Open-source: DIY and custom what you want, won a HackadayPrize!
- Raspberry Pi: it’s super expandable, endorsed by Raspberry Pi.
Mini Pupper main activities:
- IEEE PHILADELPHIA SECTION MINIPUPPER WORKSHOP, 17 May 2024, Philadelphia, Pennsylvania, USA.
- Mini Pupper joined CES 2024, JAN. 9 – JAN. 12, 2024 | LAS VEGAS, NV.
- Mini Pupper workshops at the Student Activities Conference (SAC) which is sponsored by IEEE Region 2 & Region 1, 21 Oct 2023.
- Mini Pupper had some wonderful workshops at the events of ROS, Ubuntu, AWS, and IEEE.
- The Sense Think Act interview is a technical podcast about all areas of robotics that is hosted by Audrow Nash and sponsored by Open Robotics.
- Mini Pupper was shown both on the first page of the Kickstarter and Makuake campaign platforms.

Problem
There is no ROS, open-source robot dog platform to study at less than $1,000USD.
You maybe see many demos from Boston Dynamics Spot Mini, many guys want to own their own robot dog to explore the functions, but the price is too high to accept, and it is not easy to explore the robot dog features.TurtleBot is very convenient for wheeled robot study, but not legged robots.
Solution and Product
Beginning 2020, we shipped many Stanford Pupper units worldwide. After such global success with Pupper, we took to heart all the feedback from this endeavor. What do our customers want in our products? What kind of products do they like? After more than 11 months pursuing these requests, we would like to show you what we came up with. Mini Pupper!
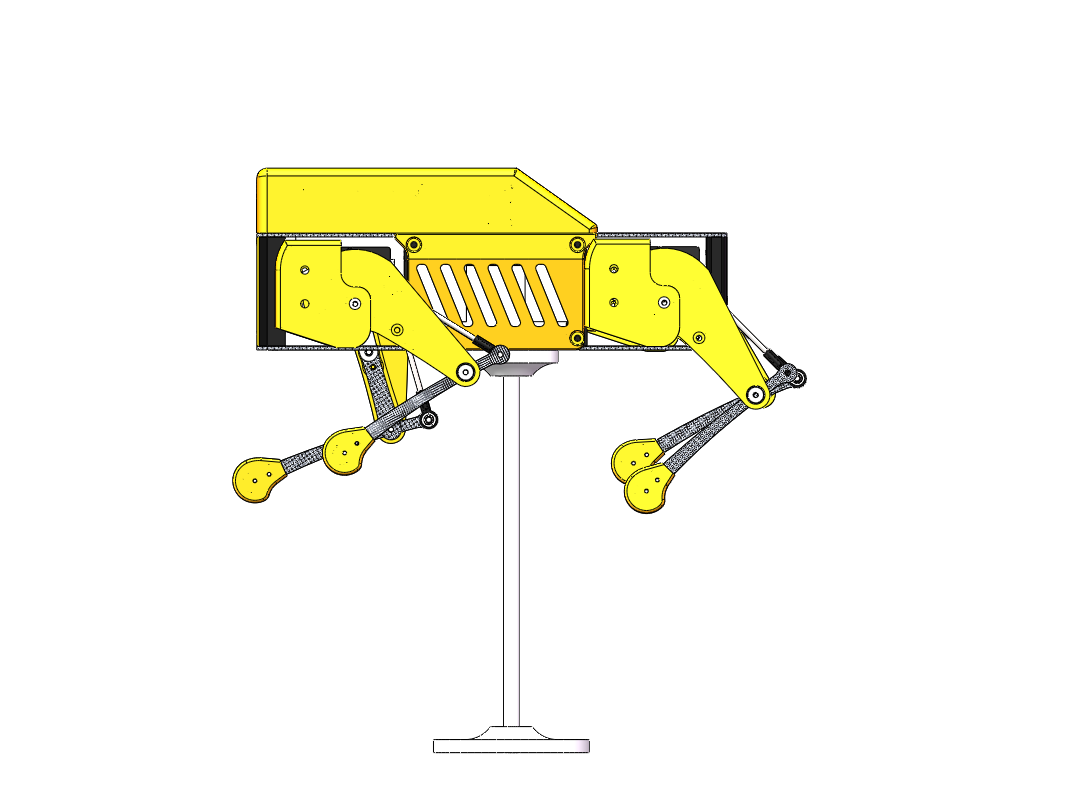
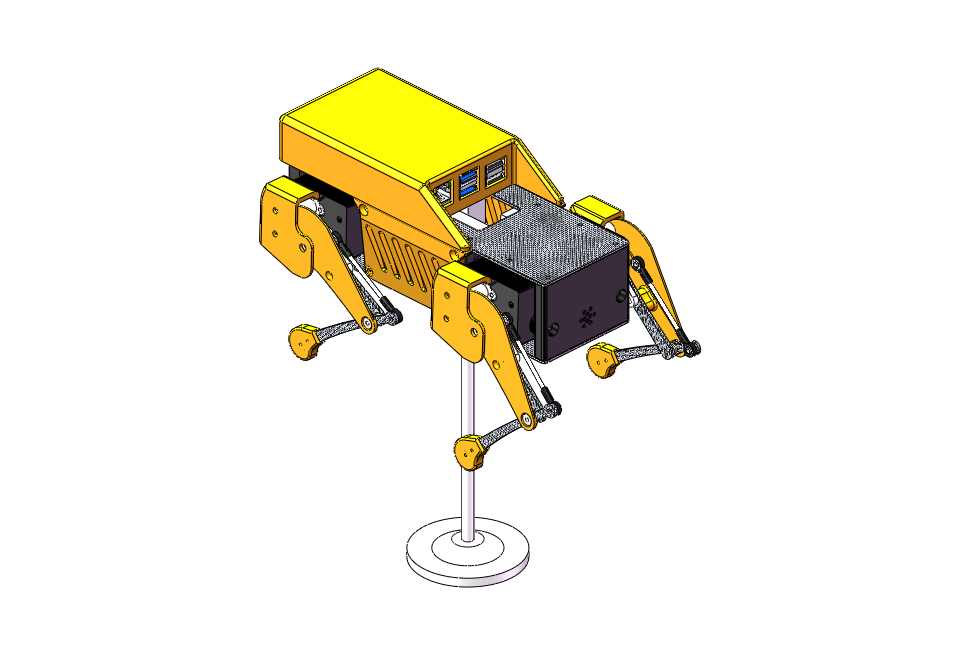
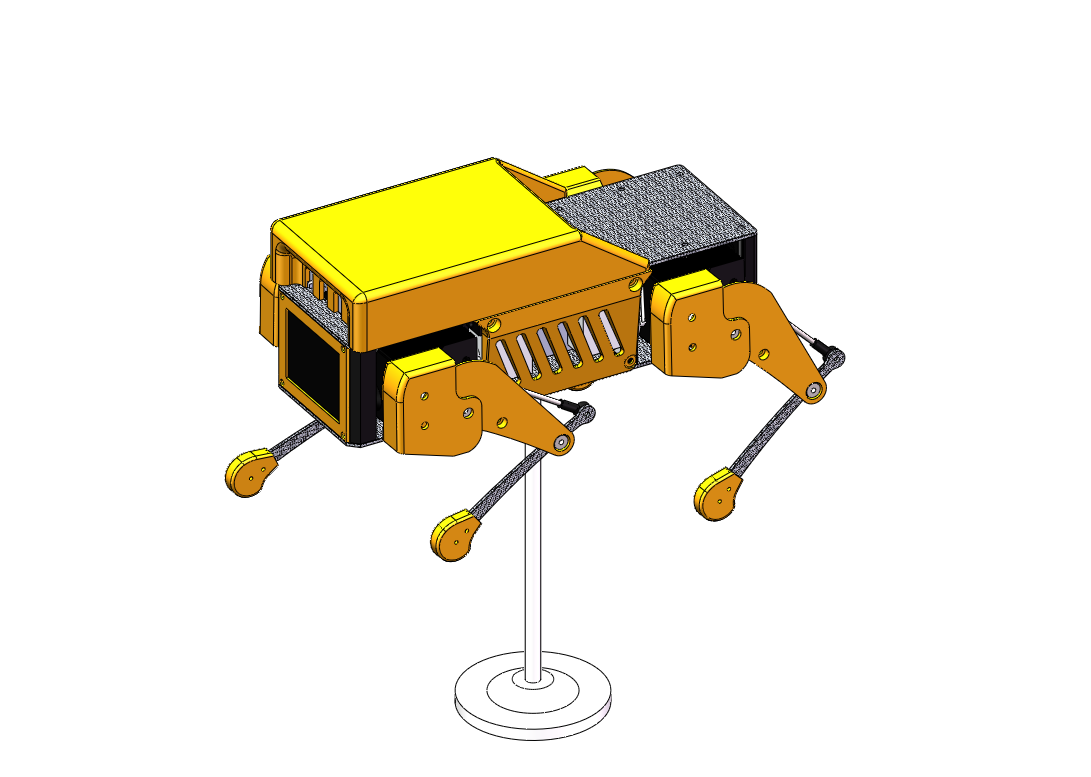
Mini Pupper is the open-source robot dog platform that supports ROS SLAM, Navigation, and OpenCV AI features with Lidar, camera, and other sensors. It's really a Boston Dynamics Spot Robot Dog in the Palm and legged "TurtleBot" for study at less than $500USD.
Mini Pupper will make robotics easier for schools, homeschool families, enthusiasts, and beyond.
How to Purchase
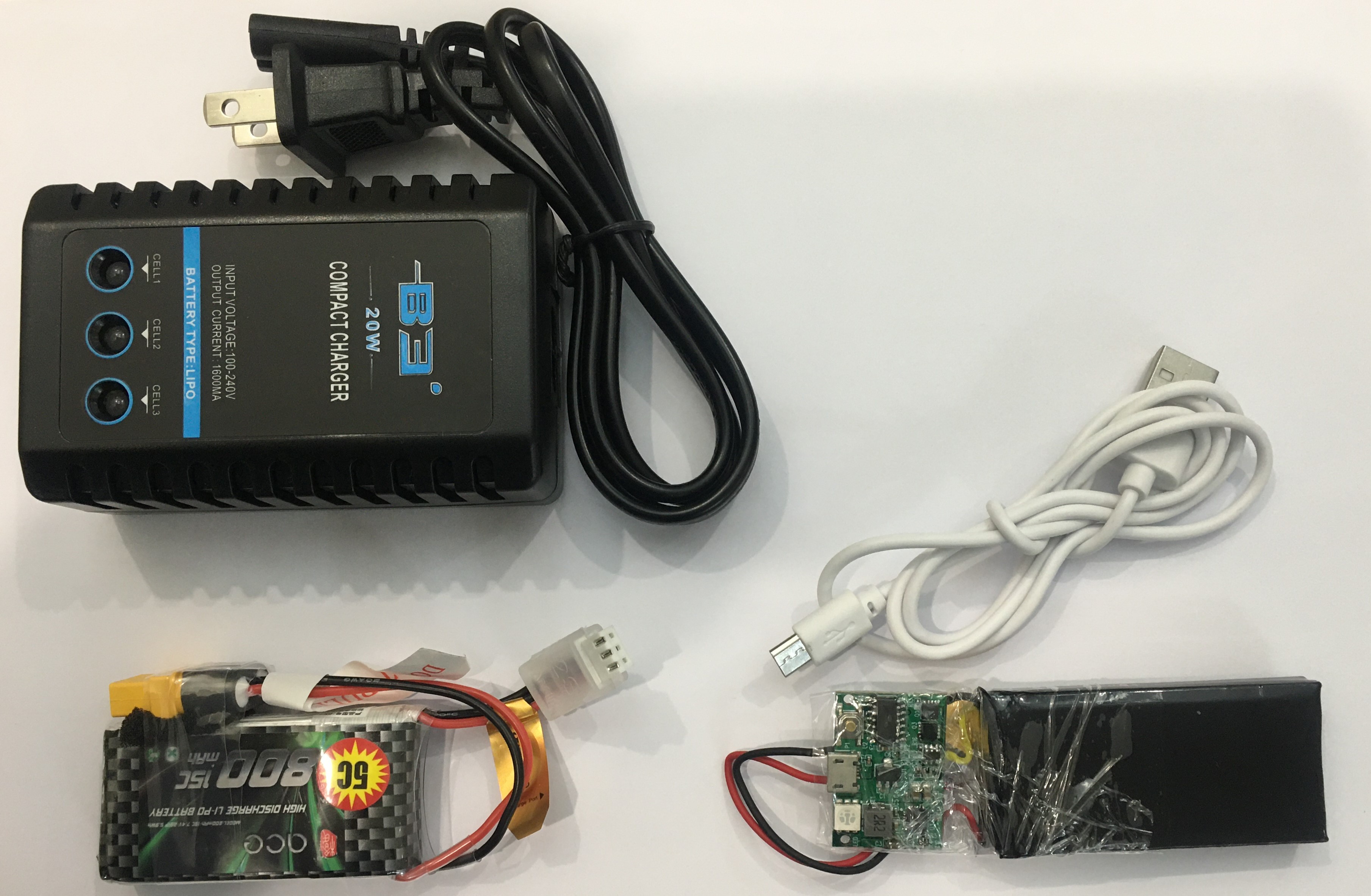
If you purchase the parts yourself one by one, it’ll run you about $800 and more time. However, you can purchase a kit to build the robot on Tindie.
What's Mini Pupper's value?
Open source: DIY what your custom robot dog
In June 2021, MangDang released Mini Pupper on the Stanford Pupper website in collaboration with Nathan Kau, the original creator of Stanford Pupper, to bring to market a commercial and reasonably priced educational quadruped robot that anyone could engagingly use for fun robotics research and experiments.
- Software custom
Gait Performance
You can use Mini Pupper to explore many gait performances, such as Trot (diagonal pairs), Pace (lateral pairs), and the Bound (front and rear pairs).
Facial Animation
You can easily custom your own facial animation, mechanical shell, and your own algorithms, we will supply enough guide documents and videos to make it easy. Here are three preset animations, you can change and make your own set with just one click!












 Cole B
Cole B
 BTom
BTom
 Dejan
Dejan
Is there another mini pupper forum then that on Facebook?
I'm no Facebook user and don't want to become one due to data security reasons.