 Capt. Flatus O'Flaherty ☠
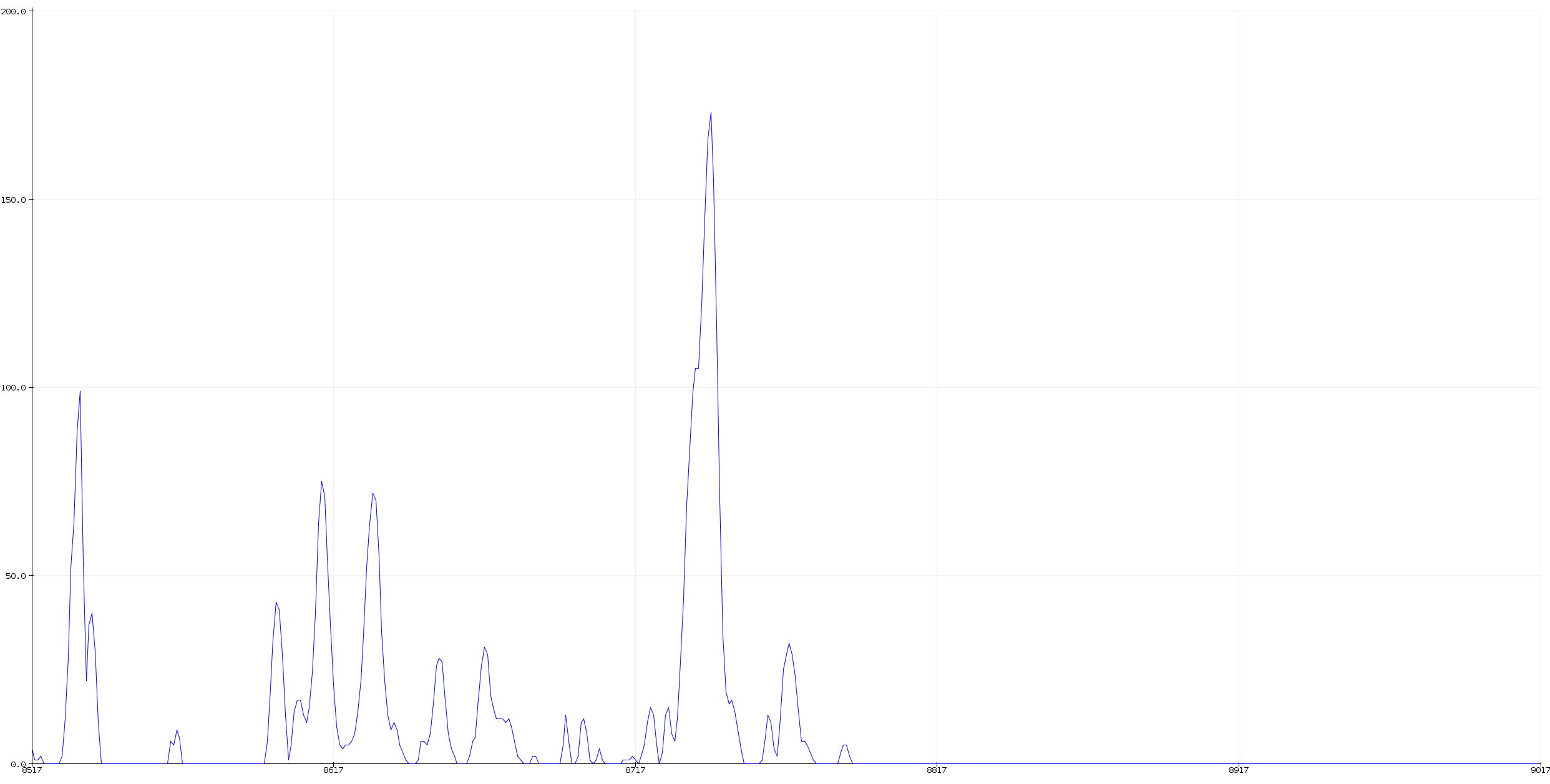
Capt. Flatus O'Flaherty ☠Since taking on a part-time job as a bicycle courier delivering parcels for Hermes Parcelnet, UK, I realised that rear facing lighting was really important to ensure safety on the road. I started using regular LED cycle lamps, which were pretty good, but decided to take this 10 steps further and build a massive illuminated sign. i started off by testing out a high spec Maxtronic ultra sonic sensor and found that multiple objects could be detected simultaneously in conjunction with a M4 processor. I used a couple of L293 motor driver chips to control the LEDs and a couple of large 5V re-chargeable lithium batteries wired in series for the power.
During the design phase, I was worried about a few things: 1. Would the lettering be properly visible with the number of LEDs used for each letter and 2. Would the L293 chips cope with the 180 LEDs used for the project. During testing of the device, the lettering was perfectly distinguishable and the L293 chips did not get at all hot, so all is good!
The 2 x L293 chips give 8 channels of power which enables different parts of the display to flash or be dimmed independently. It's important not to dazzle other road users in the dark so dimming the LEDs is very important. Conversely, in bright sunlight, high power is required for the sign to be visible. The LEDs are wired in groups of four in series from the 10V supply rather than two in series from a 5V supply to keep the current flowing through the system down and protect against over-heating.
Most of the components are SMD mounted on the board, but being of 1206 size were easily soldered by hand with very little problem. No stencil was required and solder paste was applied by hand.
Very rarely do my projects work perfectly first time, with the first PCB, but so far everything seems to be pretty good. Gerber files for the PCBs are available in the files section - just send them off to a company such as JCLPCB in China.





 Ron O'Sullivan
Ron O'Sullivan

 Yann Guidon / YGDES
Yann Guidon / YGDES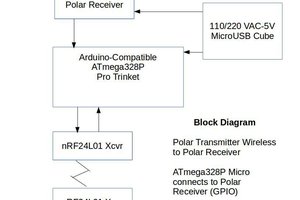
 Grayson Schlichting
Grayson Schlichting
Very well done!
I do have a concern. As both a bicyclist and a motorcyclist, I think the existence of a big red light on the back of a two-wheel vehicle could appear to a automobile driver that s/he was seeing a motorcycle. If the automobile driver made incorrect estimations of the the speed or maneuverability, it might be less safe for the bicyclist.