0%
0%
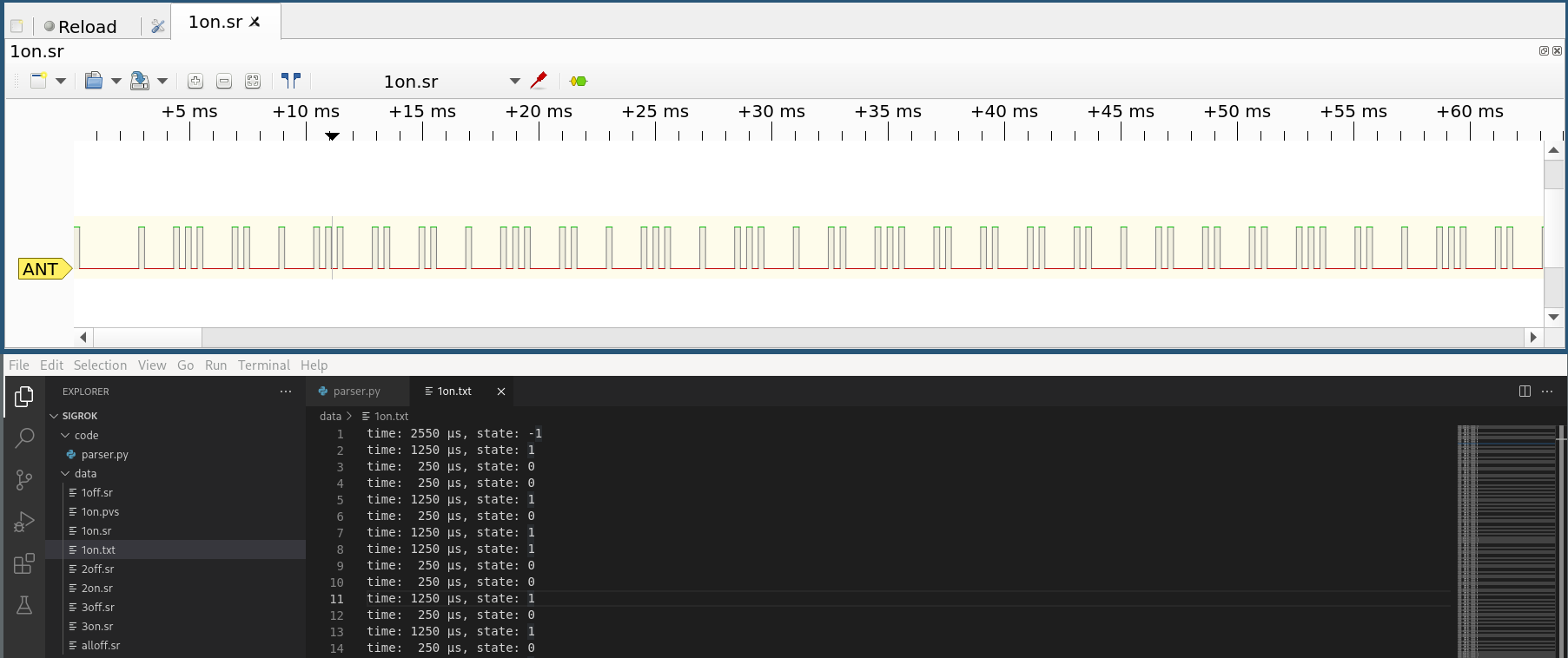
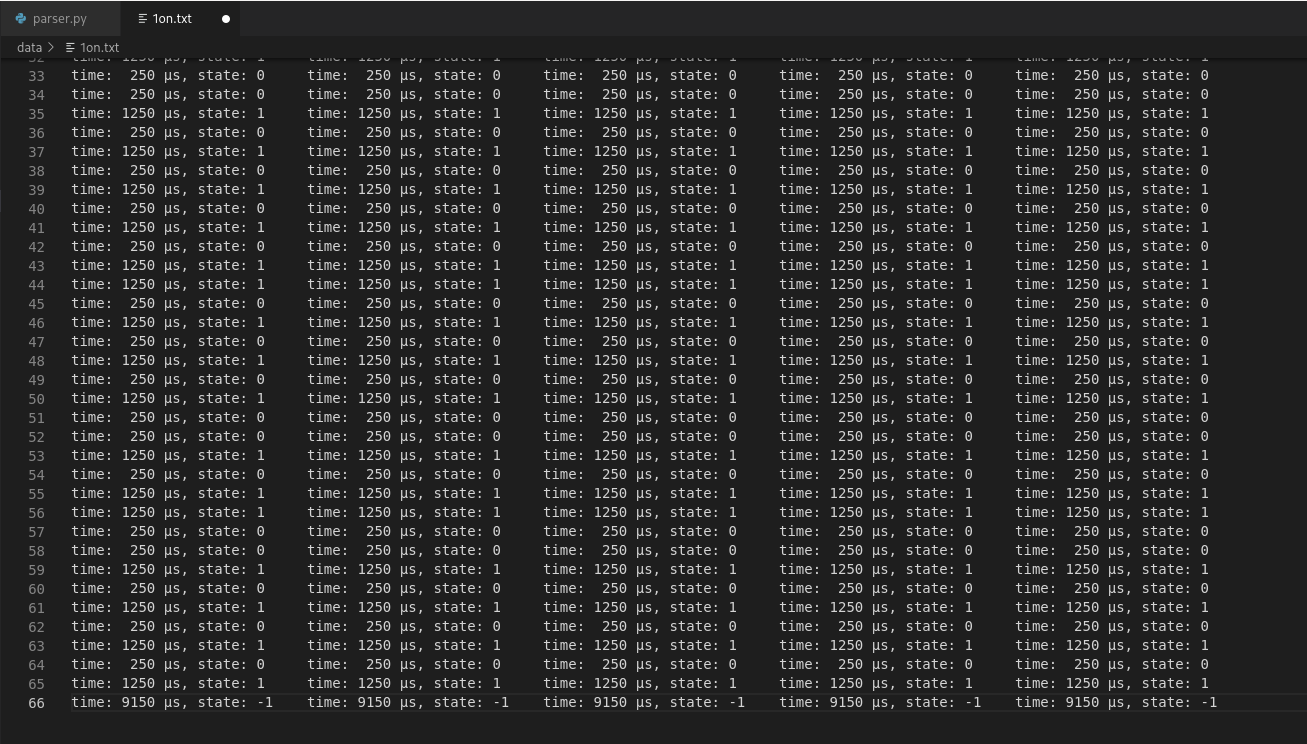
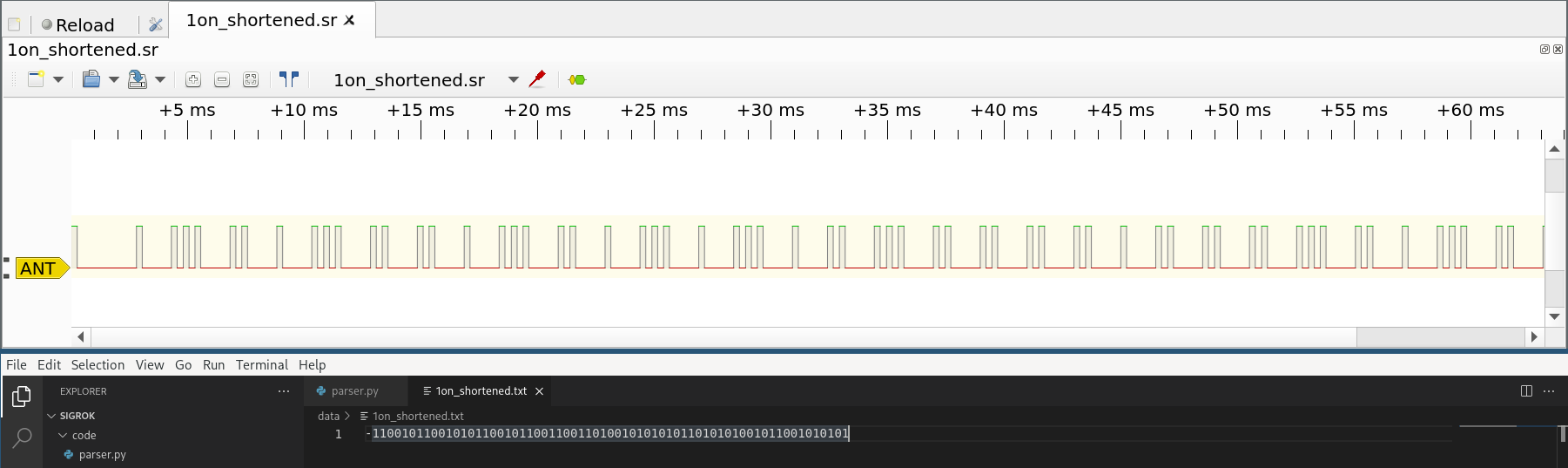
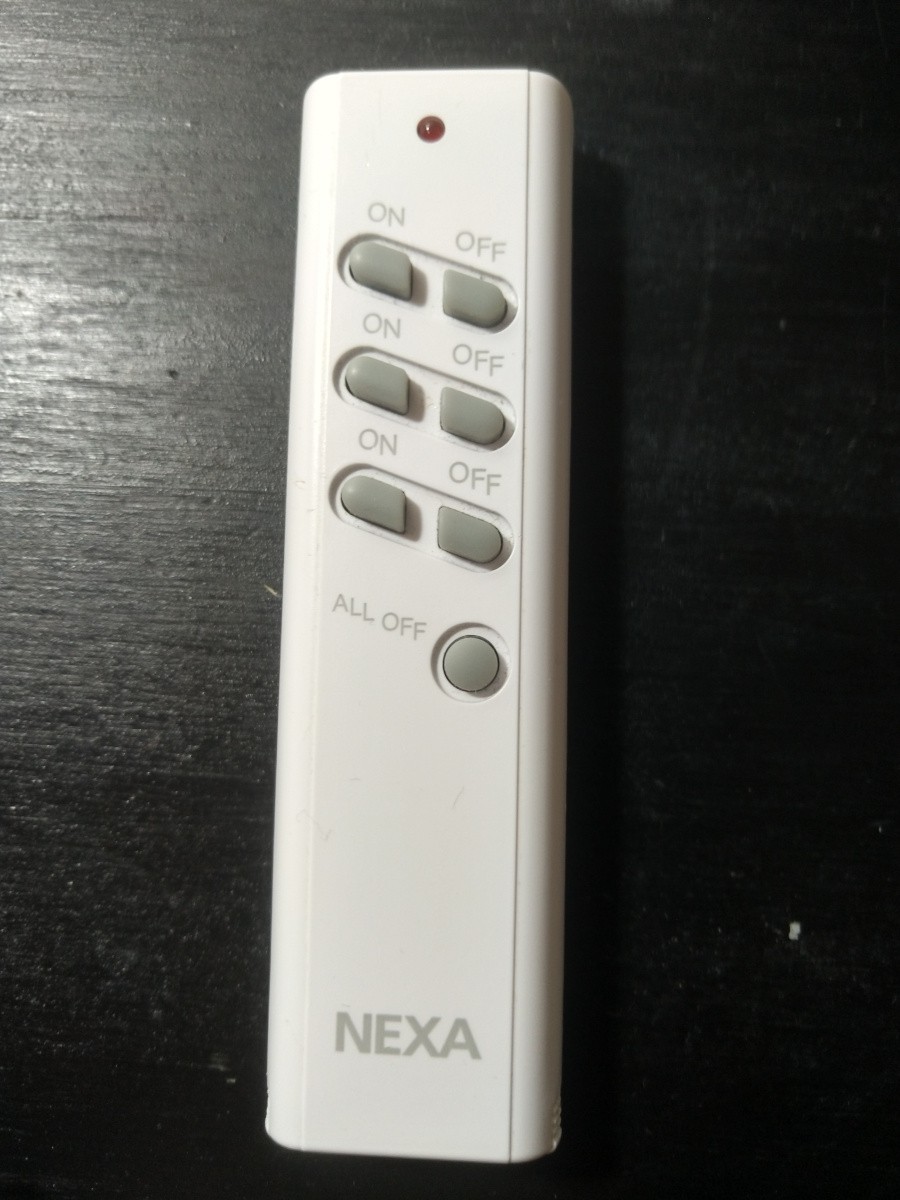
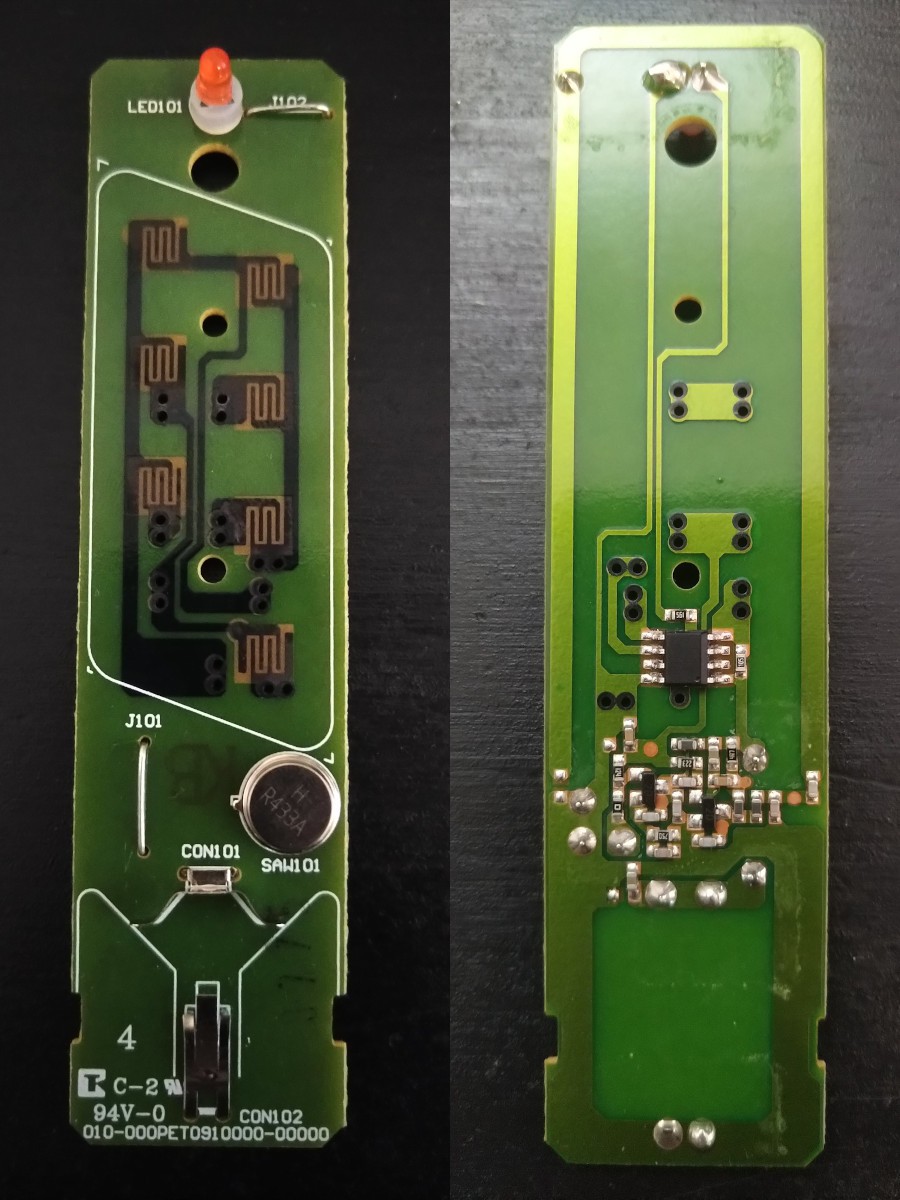
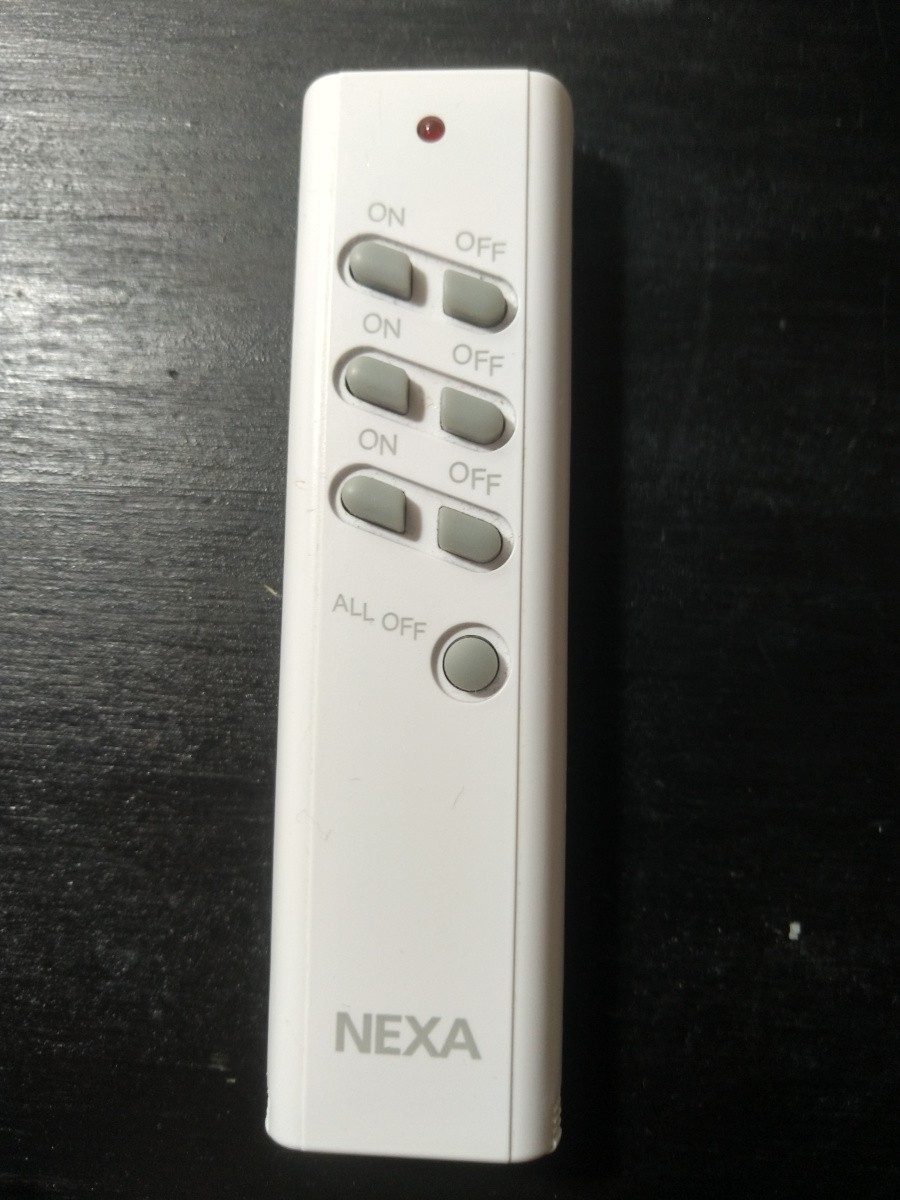
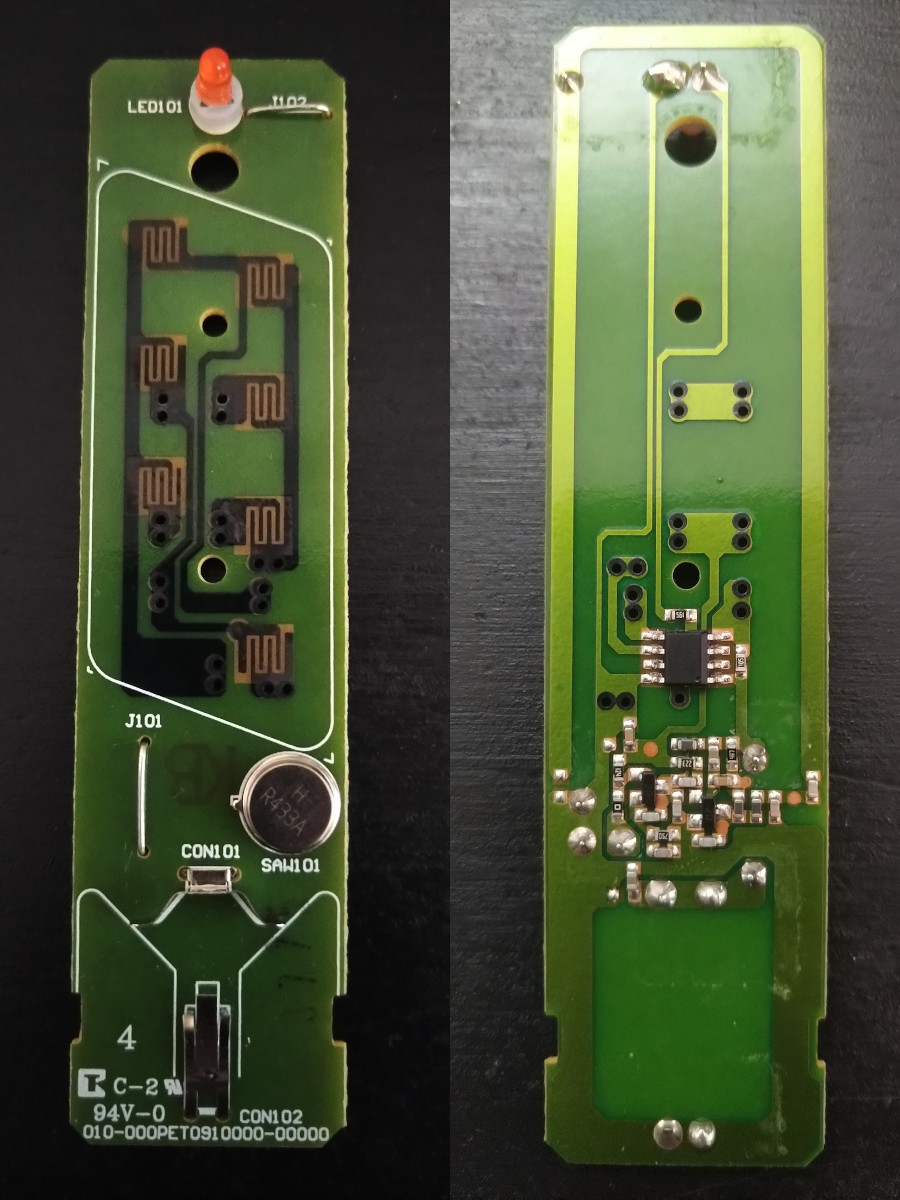
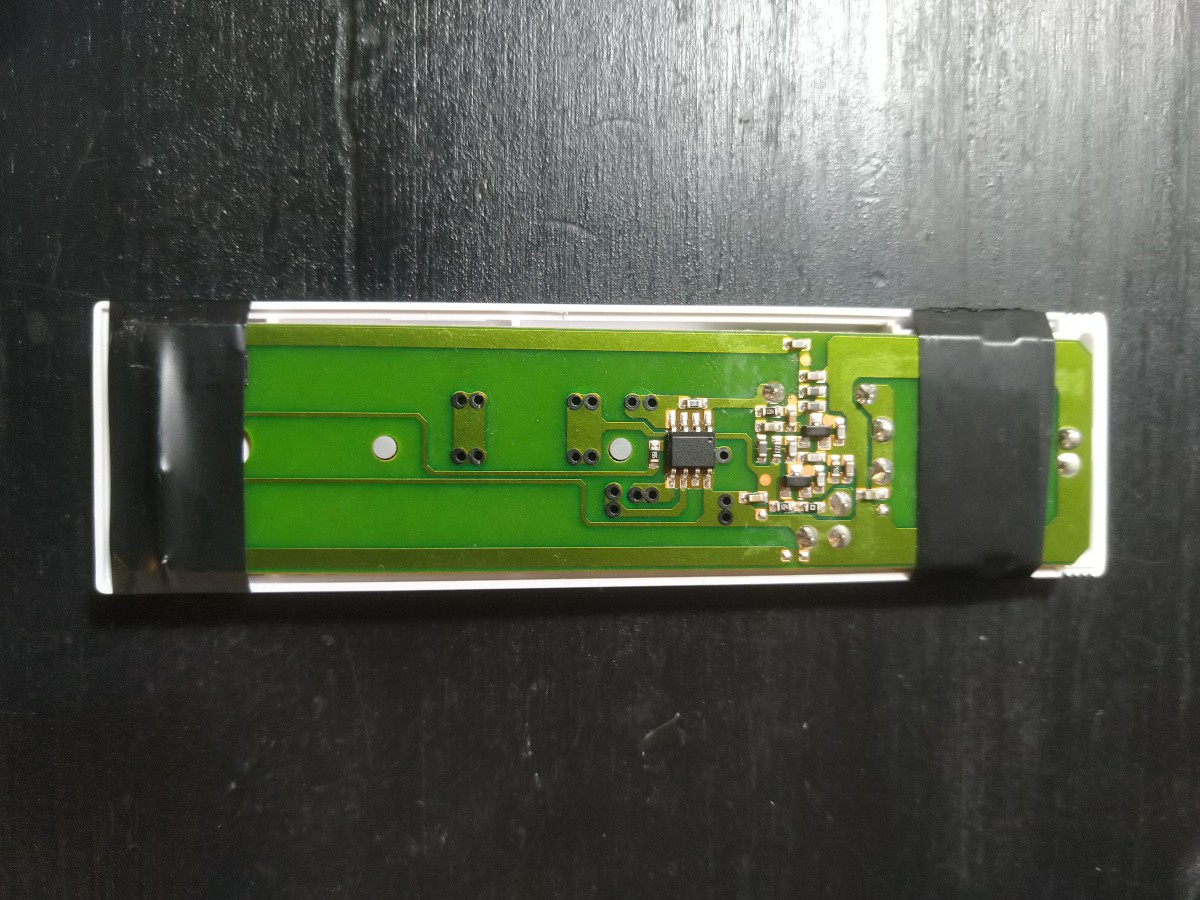
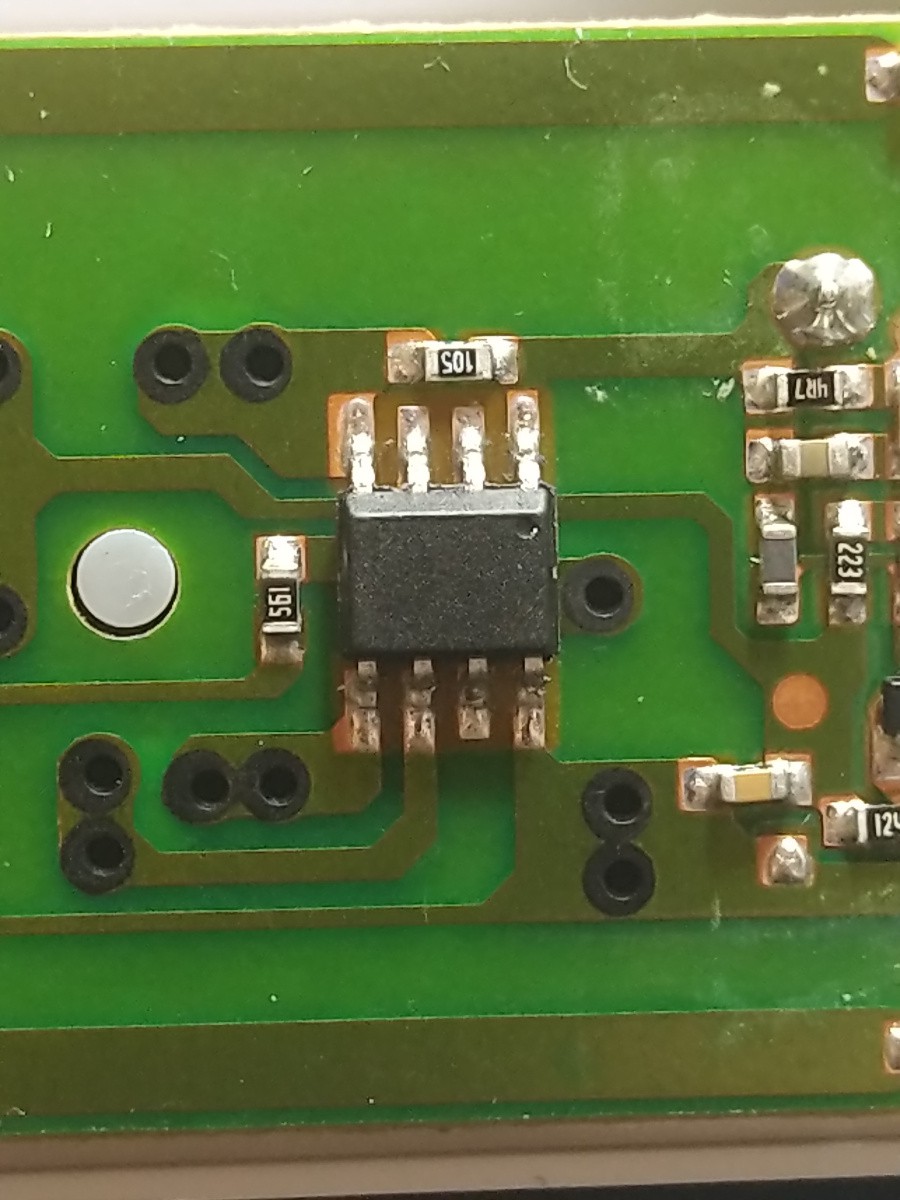
Reverse engineering wireless plugs
Attempt to control Nexa MYCR-1000 wireless plugs with Raspberry Pi
 suikale
suikaleBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests










 Bruce Land
Bruce Land
 Lex Kravitz
Lex Kravitz
 Andrew
Andrew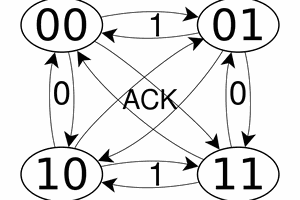
 Yann Guidon / YGDES
Yann Guidon / YGDES
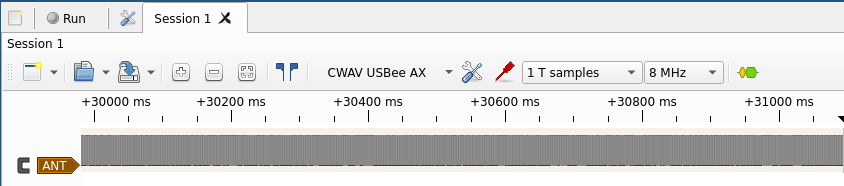
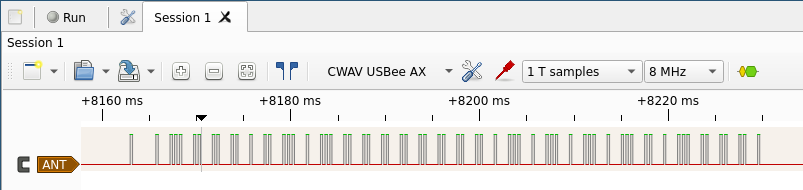
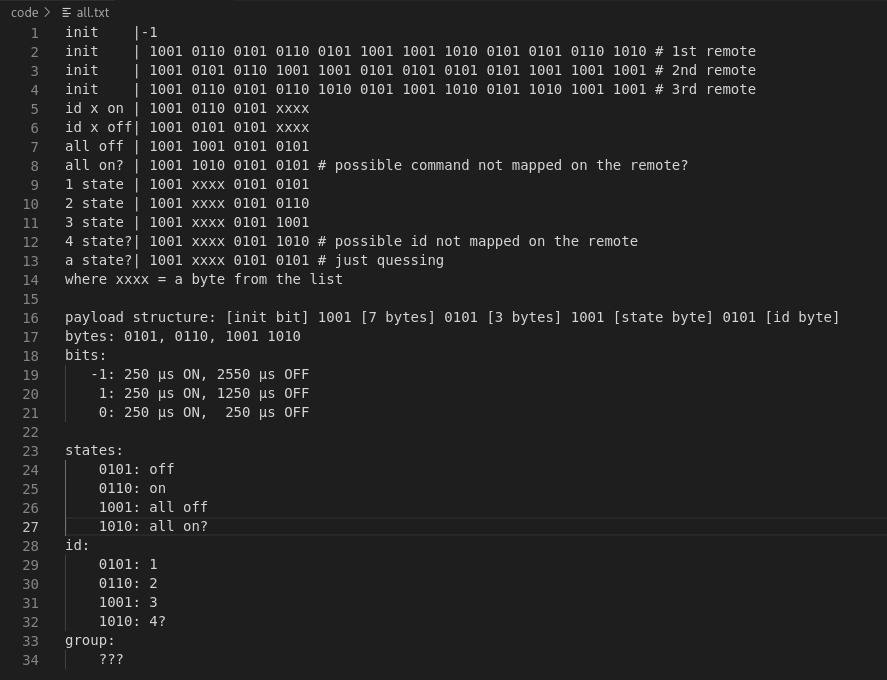
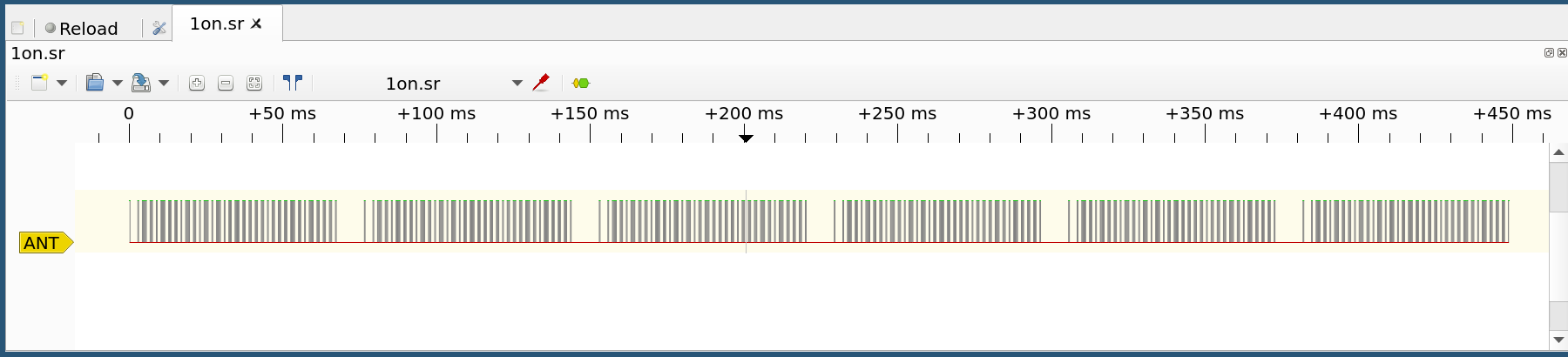
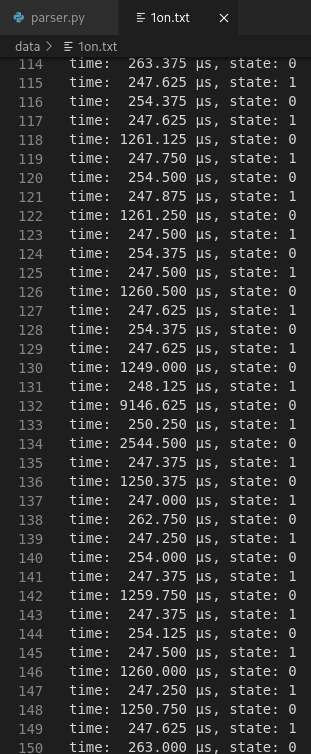
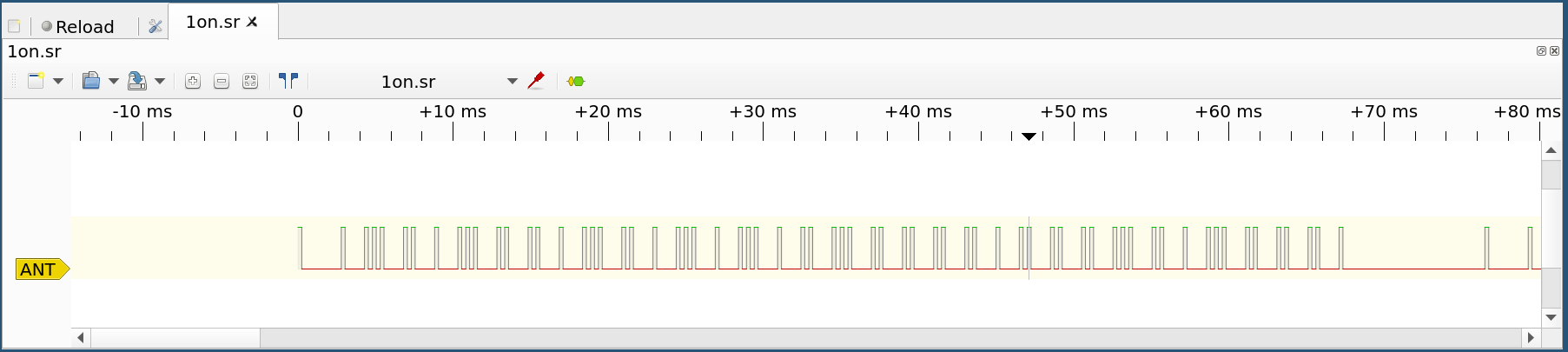
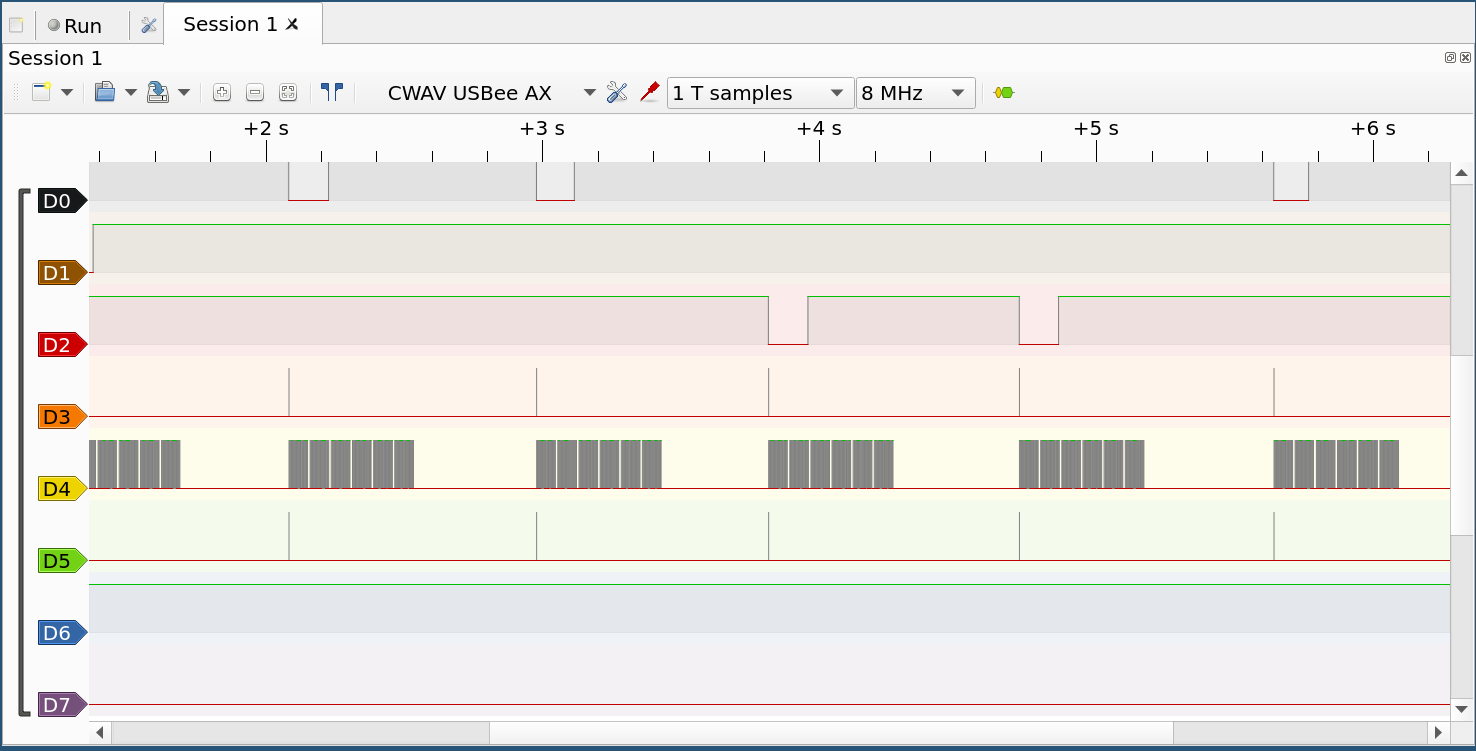
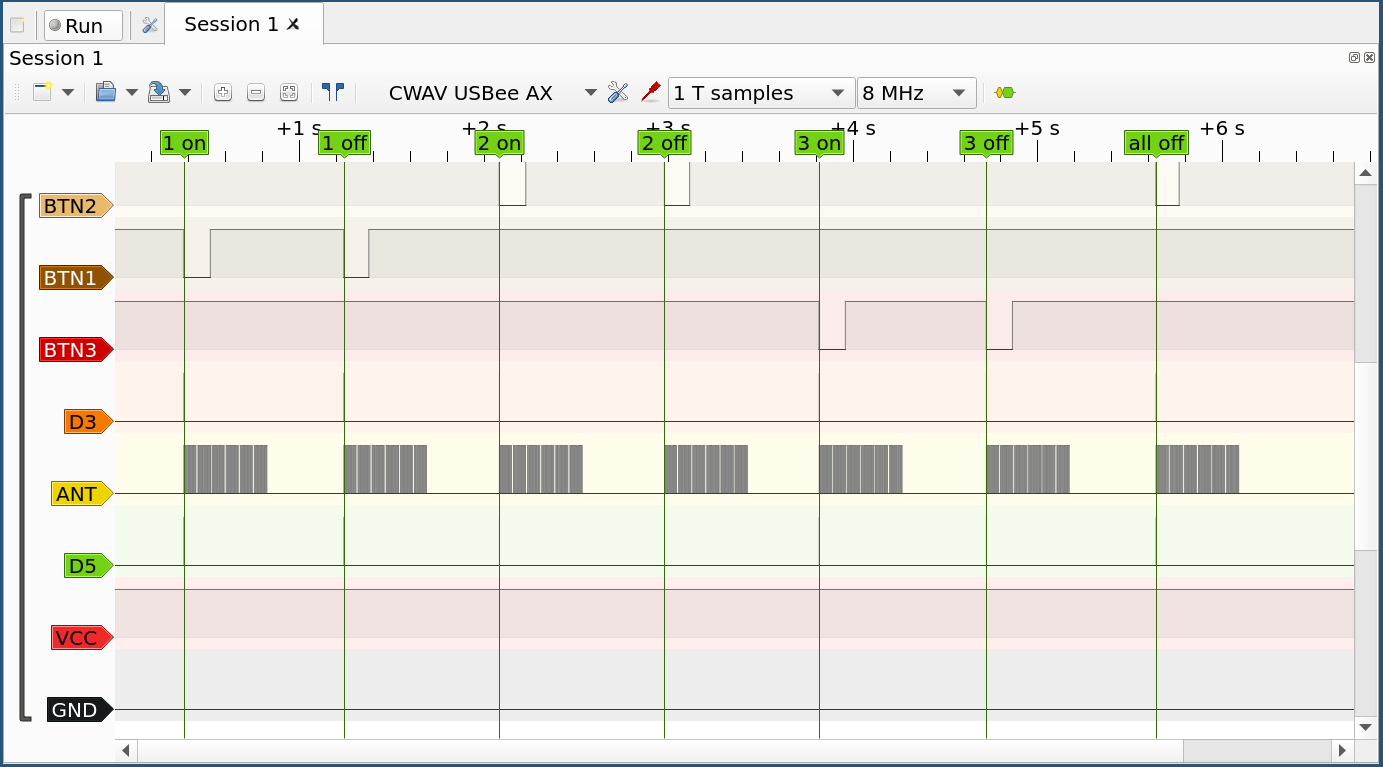
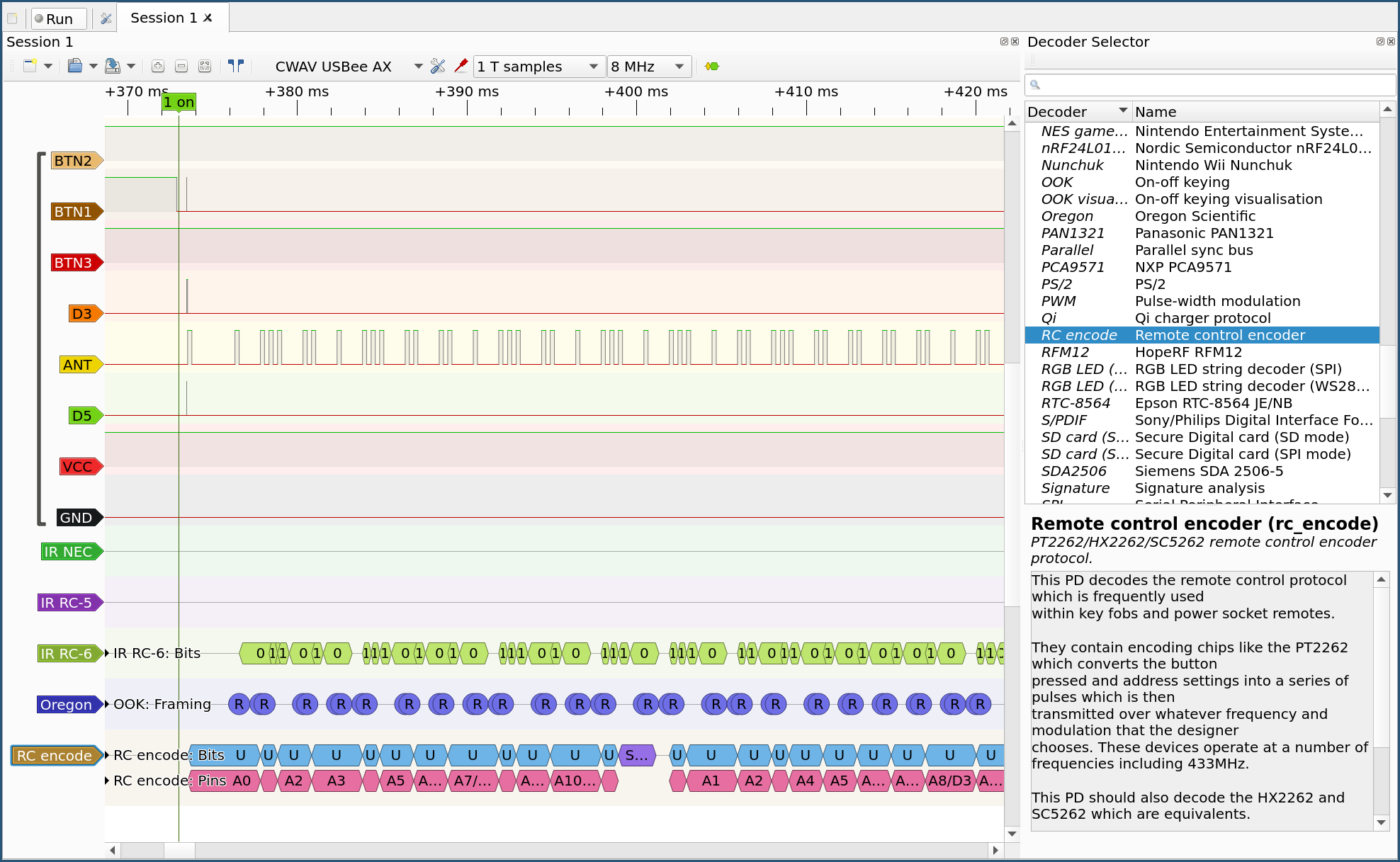
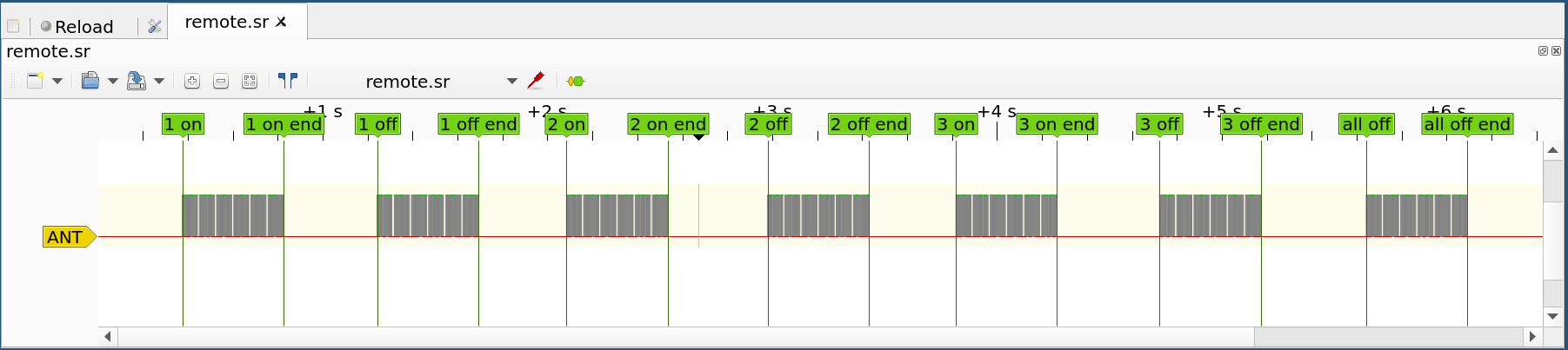
I reversed the wireless protocol. it was simple OOK.... well that was 2017 and I have to find the grc files again ;-)
Nice work.