 AirCruiser
AirCruiserNote: It has been some time since I started the project and it has become much bigger than I initially thought. Therefore, I will split the project into several sub-projects. Logs that disappeared here reappear there ;)
Initial idea...
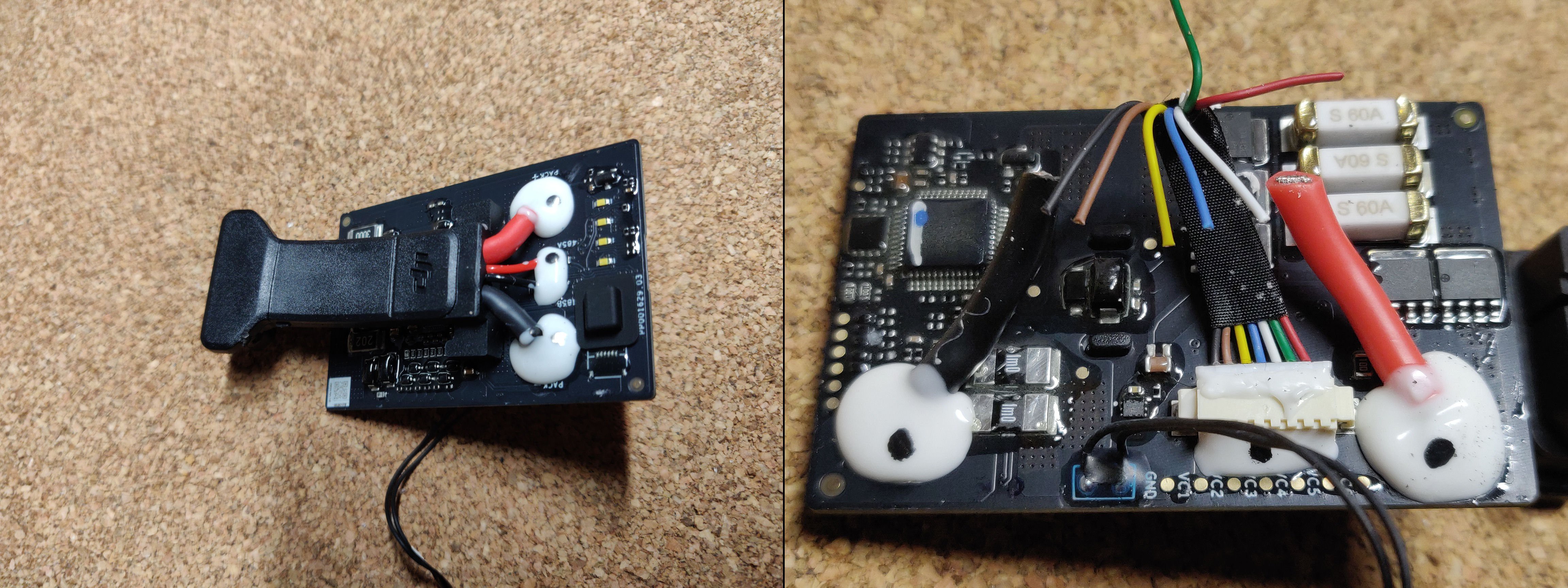
My initial research showed that DJI FPV smart batteries consist of an "smart" control board and an ordinary LiPo battery. They communicate with the drone via a three-pin plug and provide information about battery voltage, temperature, etc. Without these additional informations, the drone refuses to start the motors.
So my original idea was to separate the brain from the body. The LiPo battery control board from the LiPo Battery cells. My hope was that it would be possible to create some kind of a modular system. Use the original smart battery control board as the base module and add any LiPo battery pack as the second module.
To test this, one of my DJI FPV smart batteries had to be
sacrificed...
Disassembly of a DJI FPV smart battery
There are already some pictures and even videos of the inside of the batteries. But I took a few pictures and that shouldn't be wasted.
Opening the battery case without damaging it is not easy (impossible?). It won't open after removing the two obvious screws. In addition to four clips, there is some sort of double-sided tape holding the battery cover in place. It took me a while to open it...
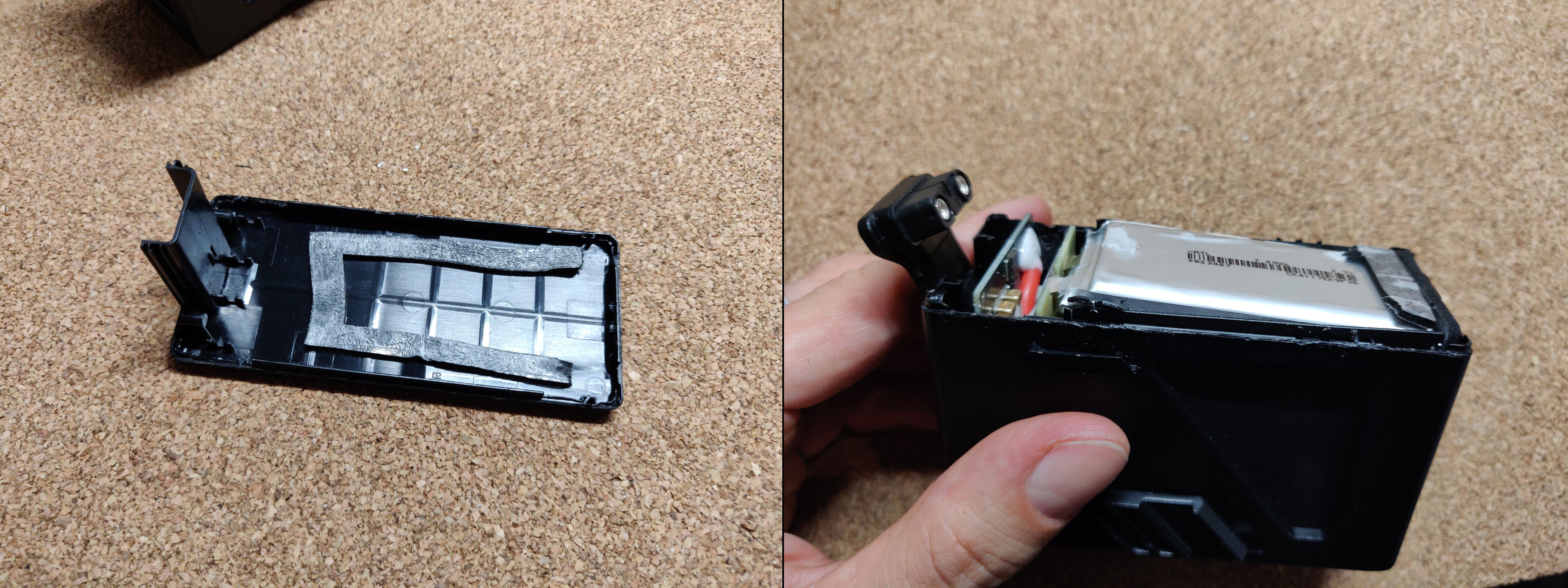
After removing the cover it was still not possible to remove the control board and the LiPo cells. The cells were additionally fixed to the bottom of the housing with double-sided adhesive tape. But the cells and the control board could be pulled out with a little effort and a lot of patience.
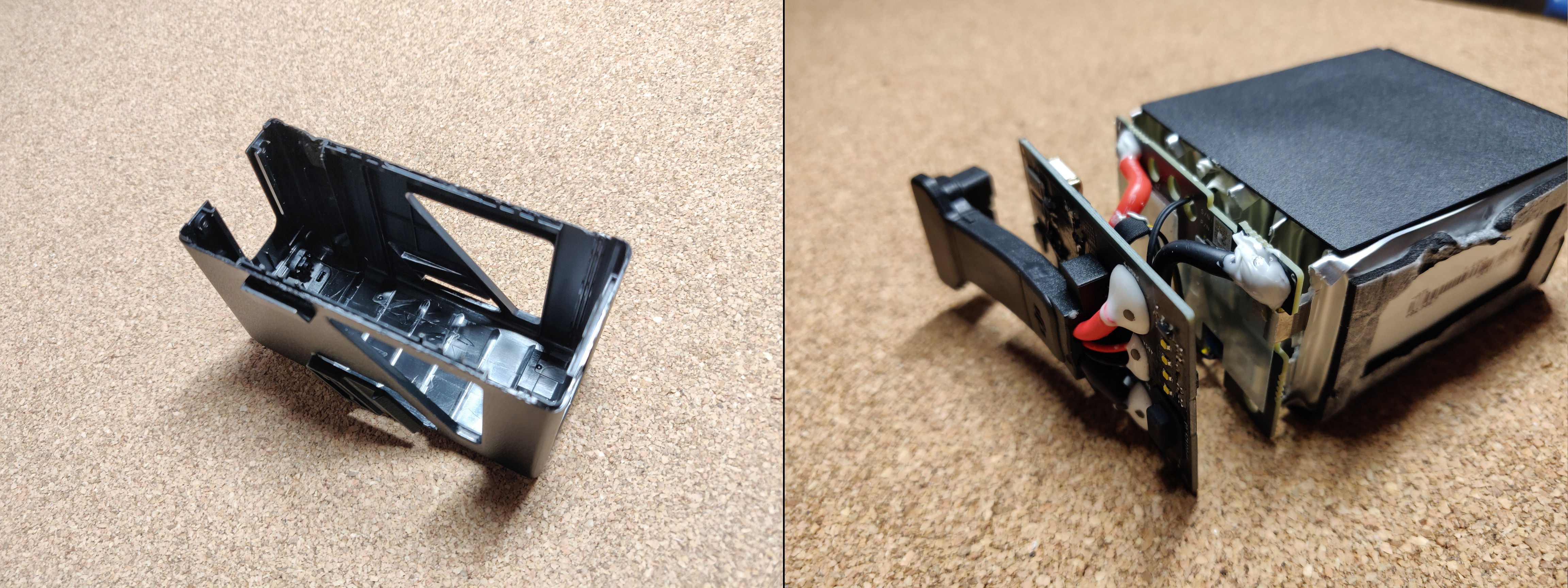

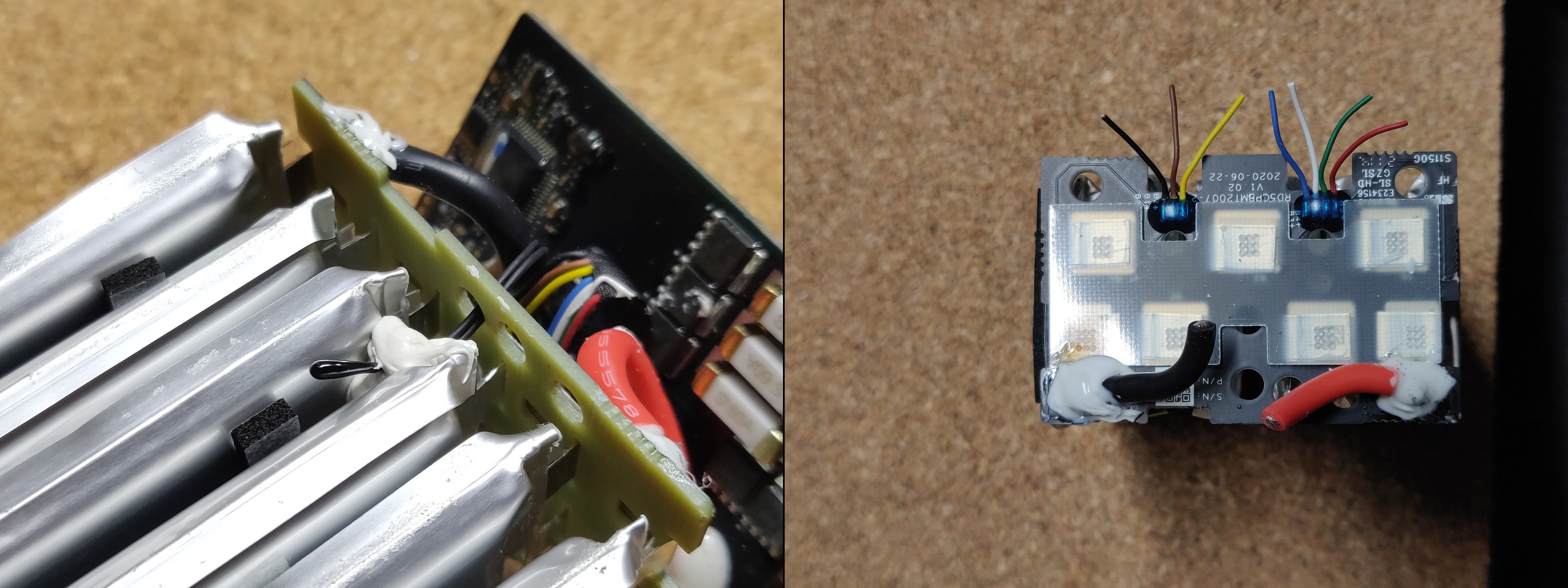
Now the time had come to separate the brain from the body. Besides the two main power wires and the six balancing wires, there was a temperature sensor that had to be carefully detached from the LiPo cells. The glue used to attach the sensor to the LiPo cells is very soft and can be carefully removed with a knife or screwdriver.
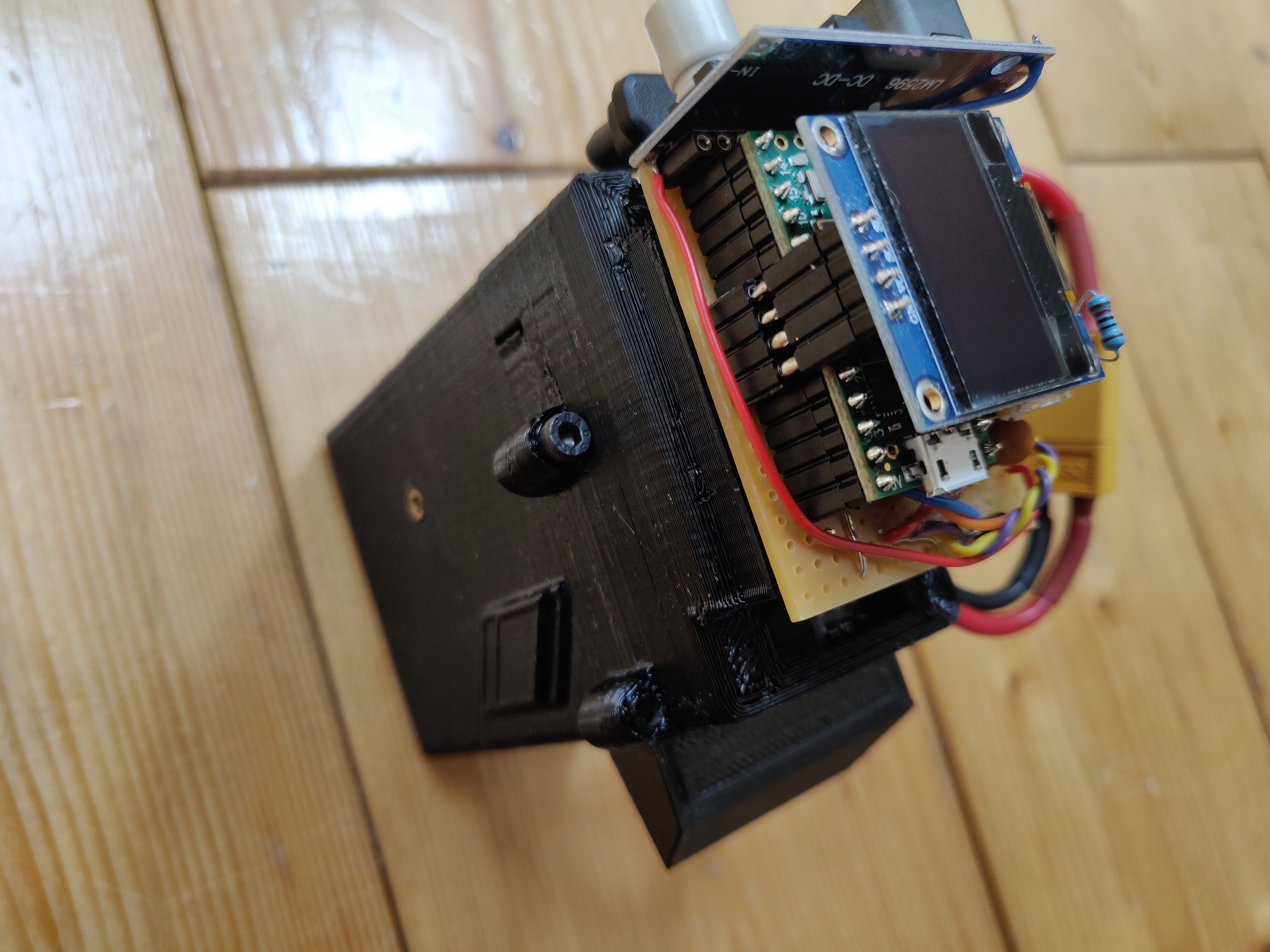
The prototype of a modular smart battery
After that I thought the hardest part was over. I soldered XT60 connectors to the main power wires and JST-XH connectors to the balance wires. A rapid test showed that the patient survived. In addition to a simple battery test, I tested the modified battery with the drone. Everything worked fine. I was able to turn on the drone and even start the motors. Nice!

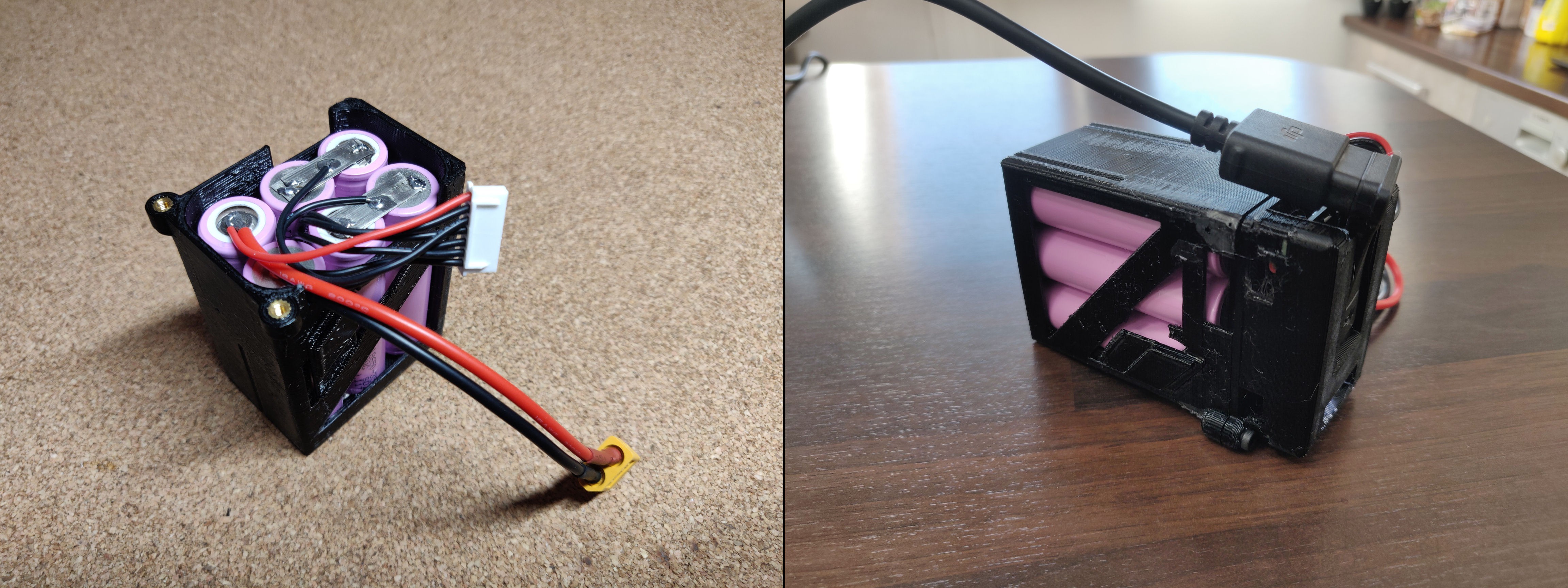
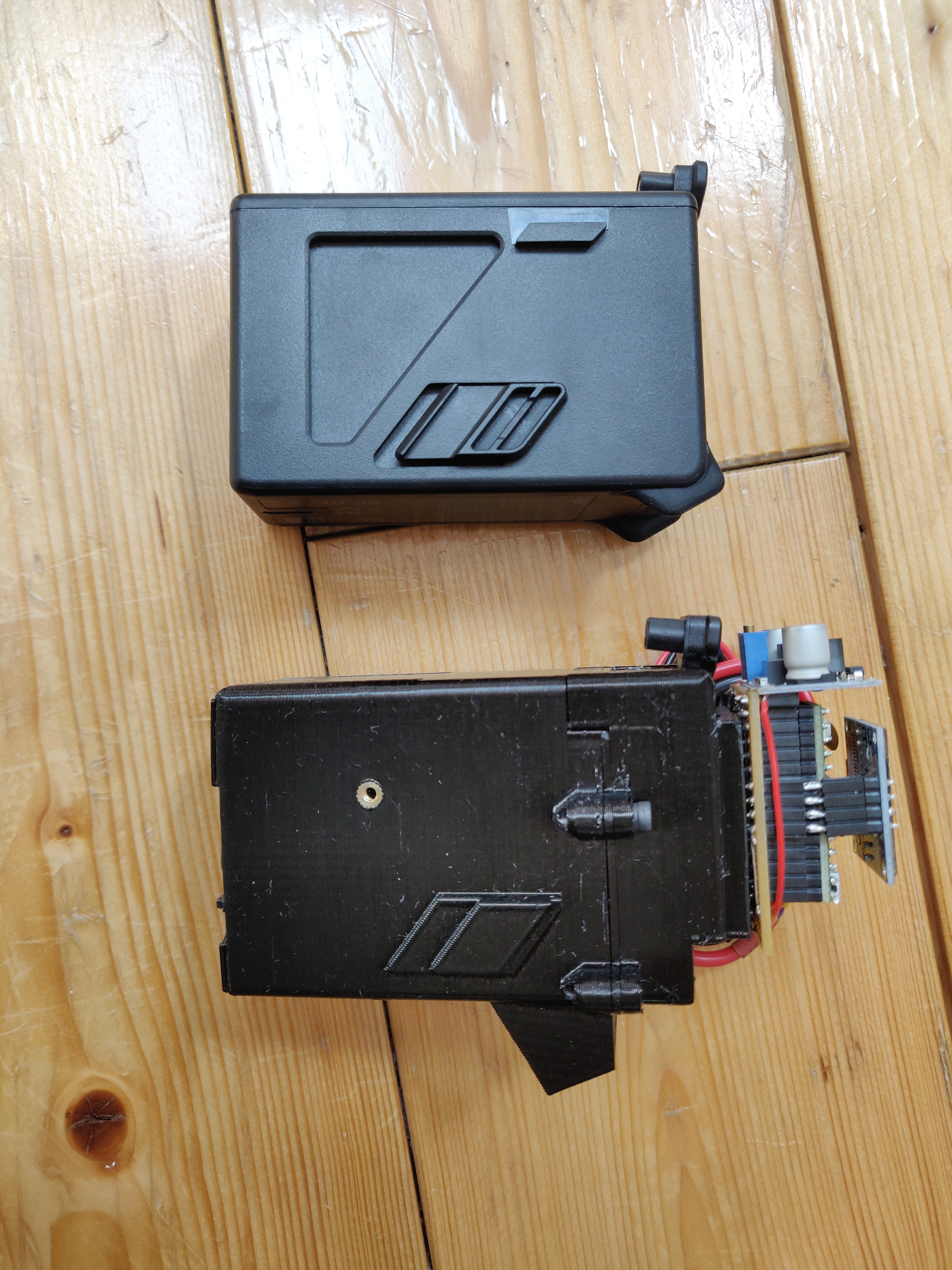
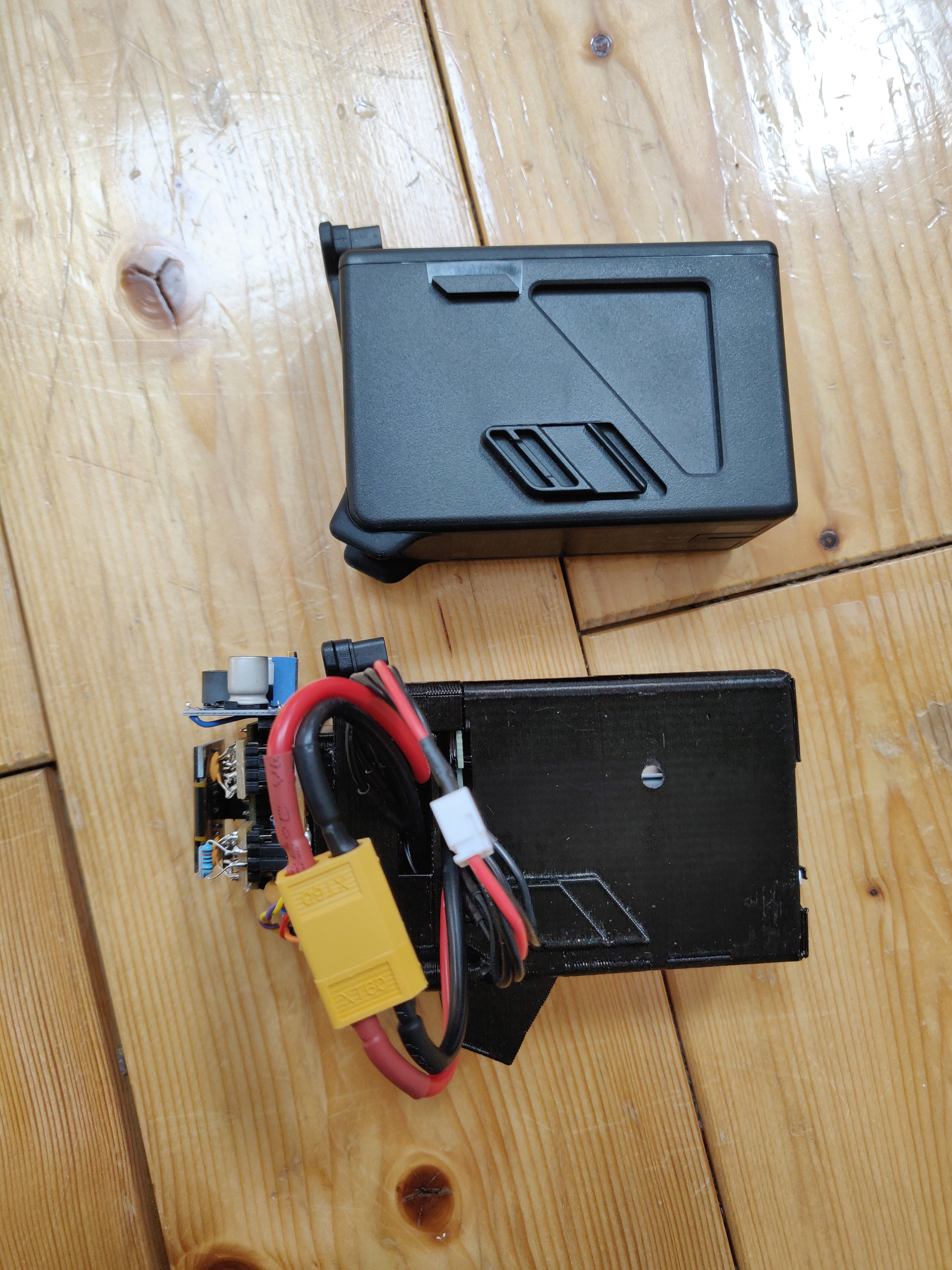
In the next step, further battery cells should be tested. The first attempt was to use six Samsung INR18650 35E LiIon batteries as a 6S pack. Weighing around 250 g and with a capacity of 3500 mAh, this battery had almost the same weight (even lighter) as the original battery but with a much higher capacity. So I soldered six of these batteries together to give it a try. Soldering LiIons is not recommended and even dangerous, but I don't have a spot welder... To hold everything together I 3d printed a case for the control board and a seperate case the battery pack. Both could be screwed together to build the battery unit. However, I wasn't sure how changing the technology from LiPo to LiIon would affect the discharge process controlled by the "smart" control board.
(I know that the maximum discharge current of this kind of LiIon batteries is much lower than the maximum discharge current of LiPos. But it was just a test and I even hoped it would be enough for some slow and smooth flights.)
When things started to go wrong
So it was time to assemble the control board and the LiIon 6S package and to turn on the drone. After connecting the pack to the board, two of the status LEDs lit up for a few seconds. After a click on the battery test button, all four LEDs lit up, indicating that the battery was fully charged. Strange because it wasn't. After turning on the drone, everything seemed fine. But then I noticed that the battery status was highlighted with a red rectangle and the drone's status LEDs were flashing...
Read more »









 benjaminaigner
benjaminaigner
 Frank Adams
Frank Adams
 esenes
esenes
Did you try to hack the drone's firmware?
https://i.imgur.com/mQOWKIv.png