 Sterling Baird
Sterling BairdNote: much of the content here are snippets from https://doi.org/10.1016/j.matt.2022.11.007. See also the open-access postprint (as of 2022-09-10). See also the build instructions published in Star Protocols.
What does a minimal working example look like for a self-driving laboratory?
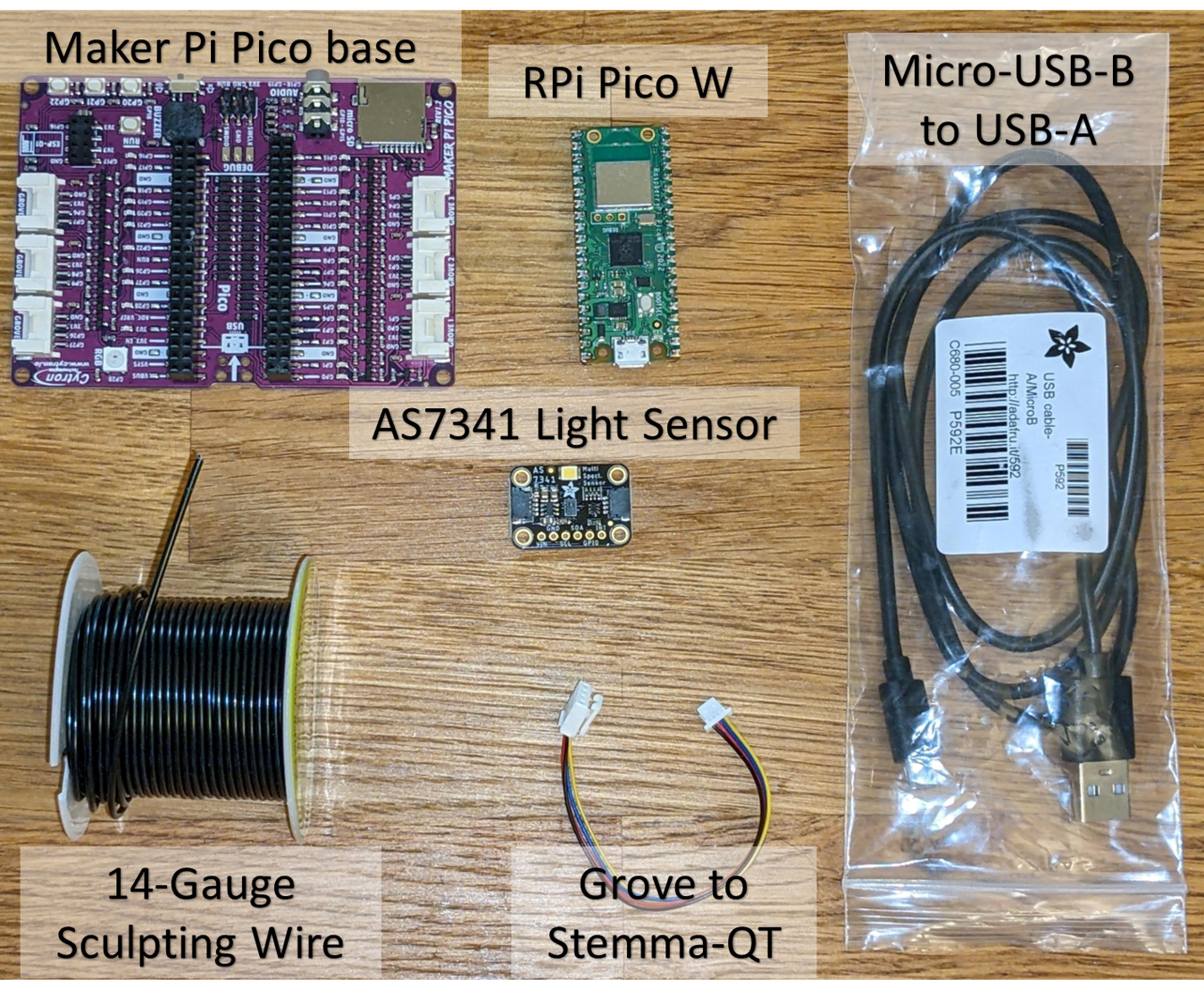
We introduce the idea of a self-driving optics demo for less than $100, a square foot of desk space, and an hour of total setup time. See the following video for an introduction of how this works:
We believe our demonstration adequately meets the minimal, complete, and reproducible requirements of a MWE SDL (Table 1)
| Programming | Self-driving Laboratory | |
| Minimal | Use as little code as possible that still produces the same problem [7] | Minimize the cost, size, and setup while still being an SDL |
| Complete | Provide all parts needed to reproduce the problem in the question itself [7] | Provide software with documentation and a bill of materials with setup instructions |
| Reproducible | Test the code you’re about to provide to make sure it reproduces the problem [7] | Benchmark the SDL using a fixed configuration and verify the results are expected |
as well as the high-level definition of a MAP (though not materials specific):
[A system that] carries out high-throughput and/or automated experiments, the results of which are fed back into the AI that guides the selection of subsequent rounds of experimentation to optimize or make a discovery.
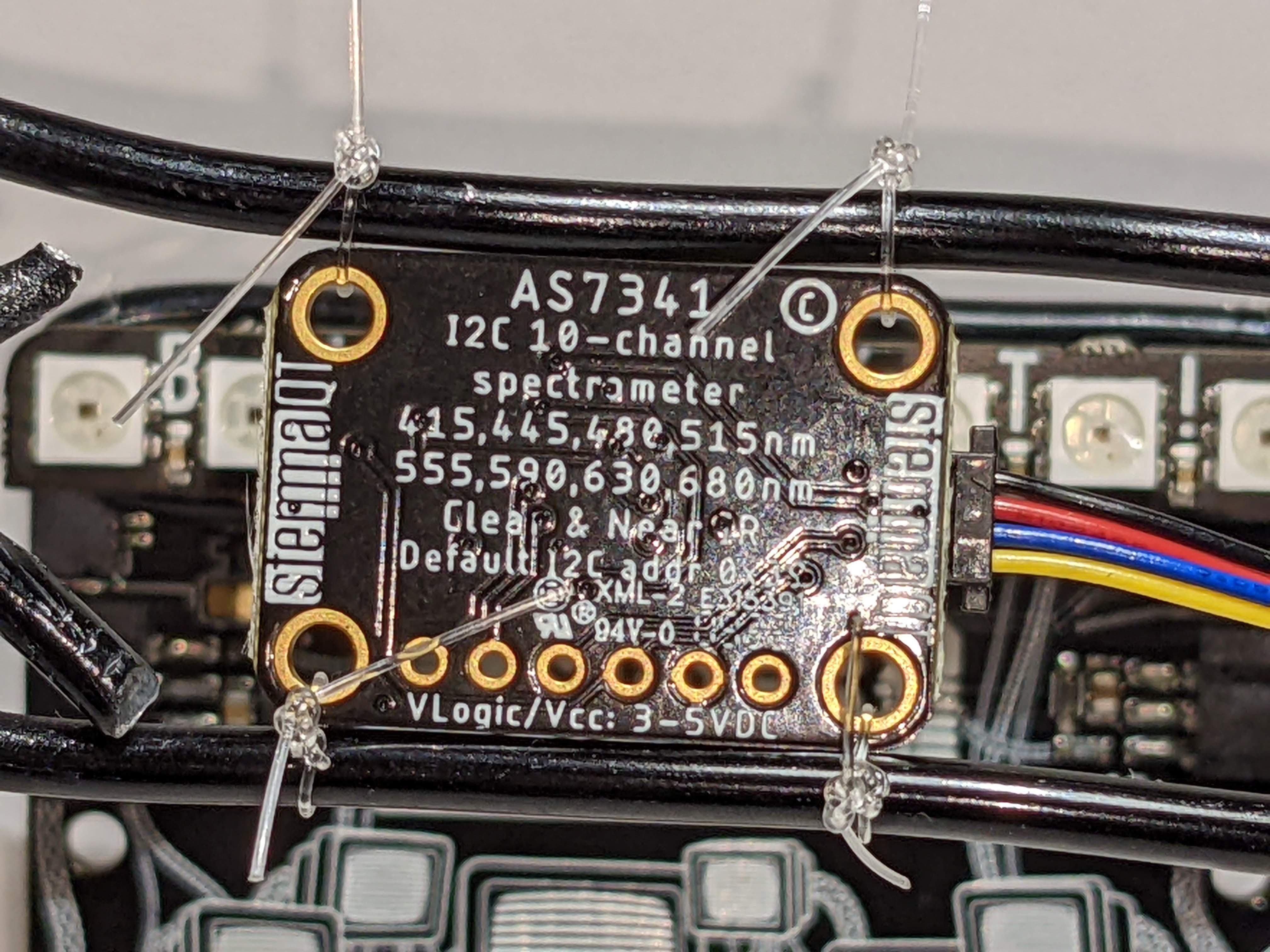
The demonstration involves controlling the brightness of light-emitting diodes (LEDs) at fixed wavelengths, sensing the light mixture via a discrete-channel spectrometer, decision-making to tune the inputs to best match the desired spectrum, and optionally, cloud-based simulations to aid in decision-making. The setup is summarized in Figure 1.

Figure 1: Summary of the self-driving laboratory demonstration (SDL-Demo). A microcontroller (Raspberry Pi (RPi)) sends commands to a dimmable red green blue (RGB) light-emitting diode (LED) to control the brightness at different wavelengths. A spectrophotometer measures the light signal at eight individual wavelengths. The microcontroller reads the intensity values from the spectrophotometer and uses these newly measured values and prior information (including e.g. prior measurements and physics-based simulations performed in the cloud) to choose the next set of LED parameters in an effort to better match a target spectrum. The setup adequately meets the minimal requirement of a minimal working example (MWE) self-driving laboratory (SDL) by costing less than 100 USD, occupying less than 1 ft2 (0.1 m2) of desk space, and requiring less than 1 h of setup time.
For more context, see a recording based on my talk at the 2022 acceleration conference in Toronto.
Build Instructions
References
[1] D. Caramelli, D. Salley, A. Henson, G. A. Camarasa, S. Sharabi, G. Keenan, L. Cronin, Networking chemical robots for reaction multitasking, Nature Communications 9 (2018) 3406. URL: https://www.nature.com/articles/s41467-018-05828-8. doi:10.1038/s41467 -018-05828-8, number: 1 Publisher: Nature Publishing Group.
[2] T. Fuhrmann, D. I. Ahmed, L. Arikson, M. Wirth, M. L. Miller, E. Li, A. Lam, P. Blikstein, I. Riedel-Kruse, Scientific Inquiry in Middle Schools by combining Computational Thinking, Wet Lab Experiments, and Liquid Handling Robots, in: Interaction...





 Robert Hart
Robert Hart
 Jack Flynn
Jack Flynn
 Jon durrant
Jon durrant
I'm fascinated by the novel method of speeding scientific progress through self-driving laboratories. The concept of a Closed-loop Spectroscopy Lab (CLSLab) built using readily available components such as the Raspberry Pi Pico W is excellent. It's a "Hello, World!" moment for converting difficult research into a user-friendly learning and prototyping experience. Exciting possibilities await! Consider My Assignments Help for experienced aid if you need assistance understanding such cutting-edge issues.