deʃhipu
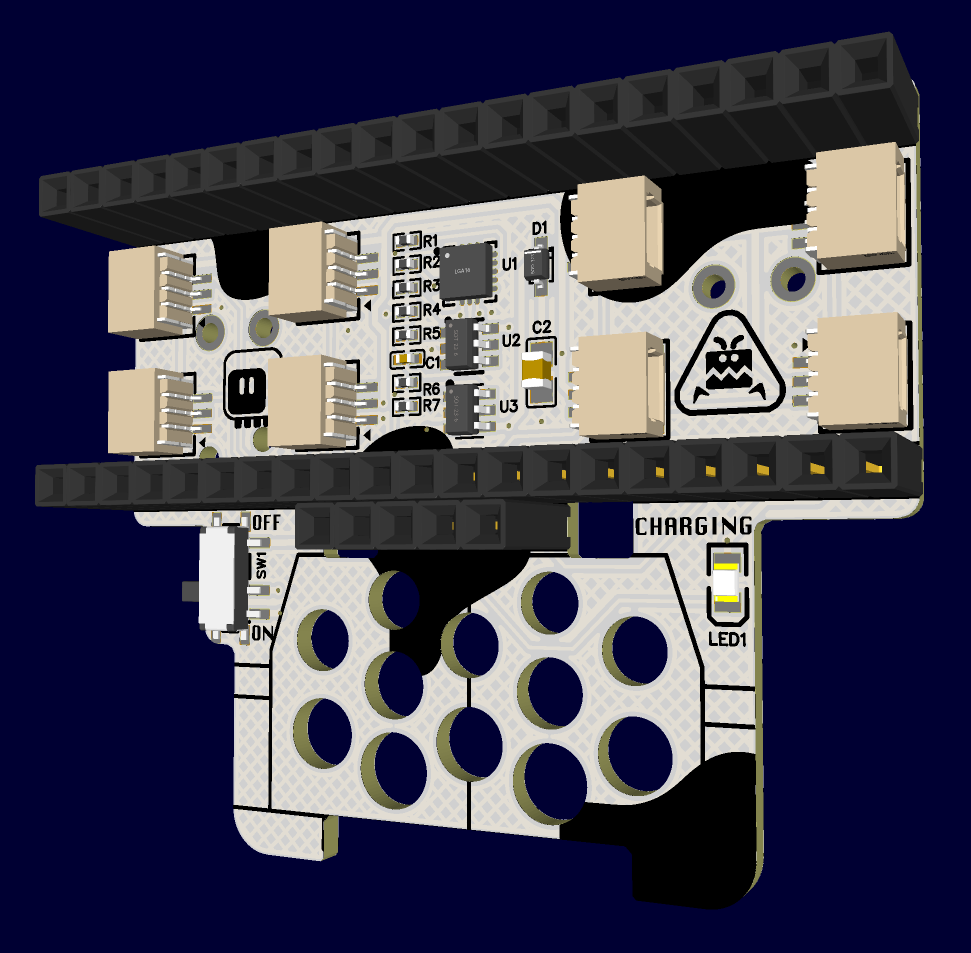
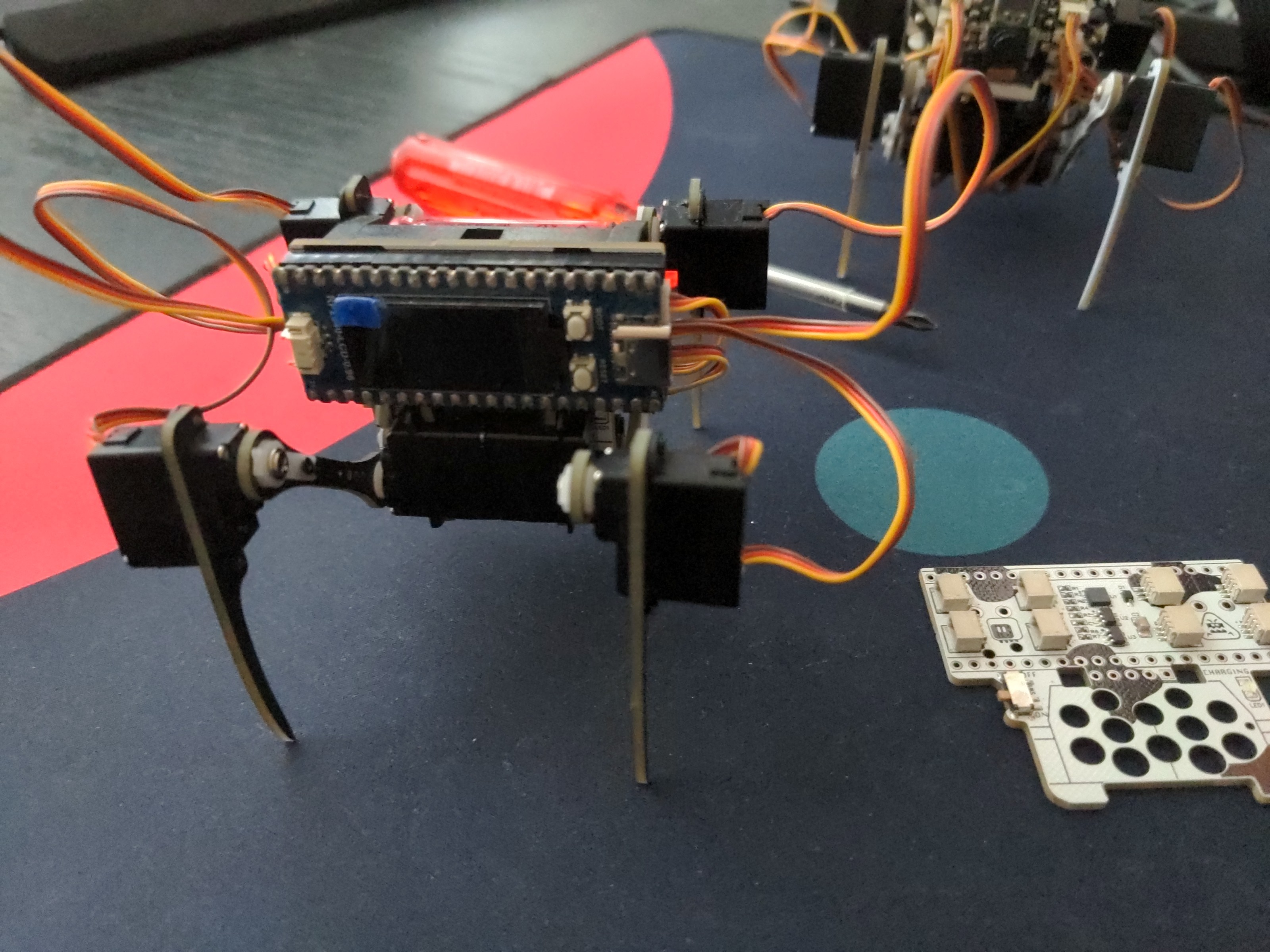
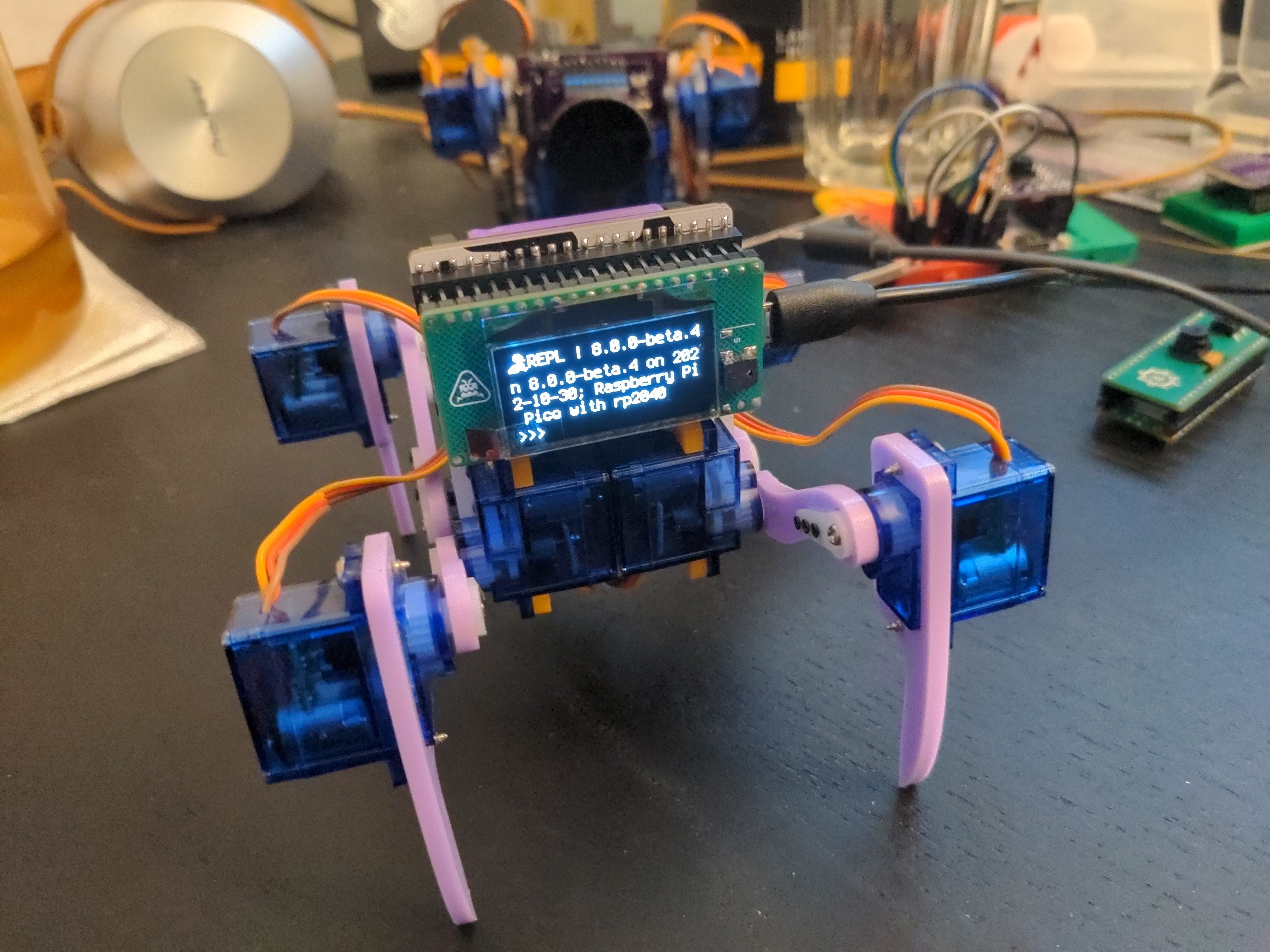
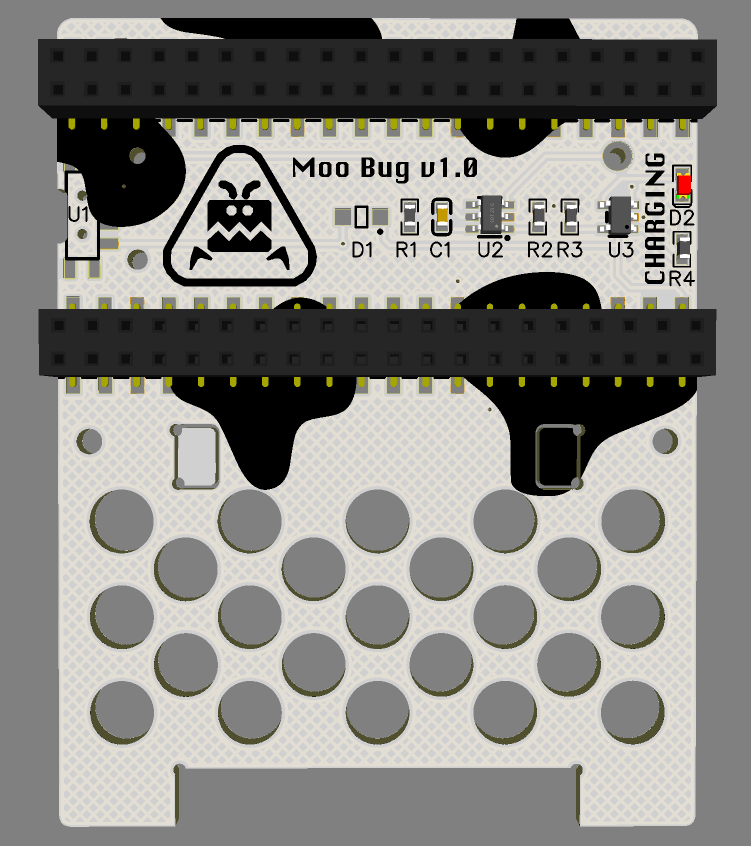
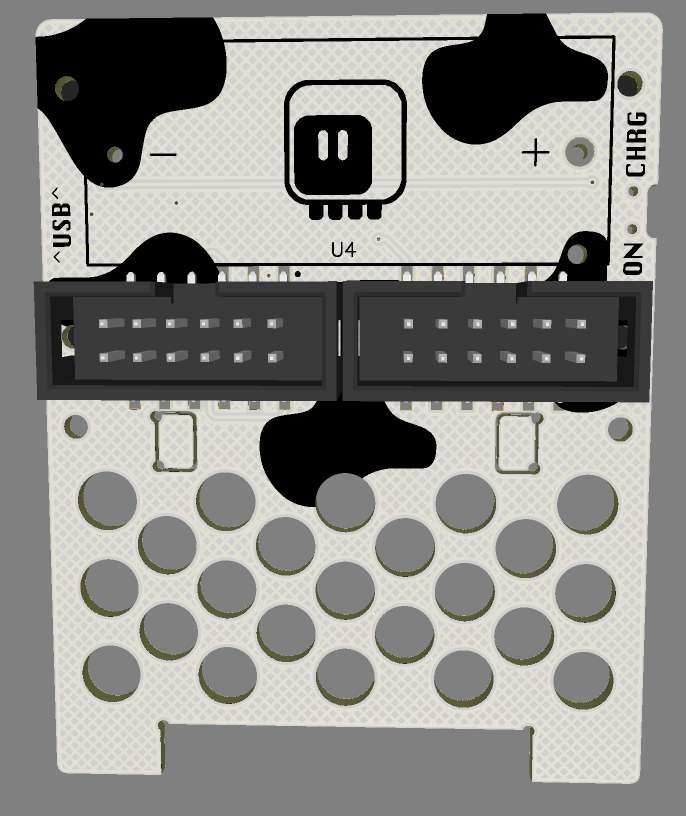
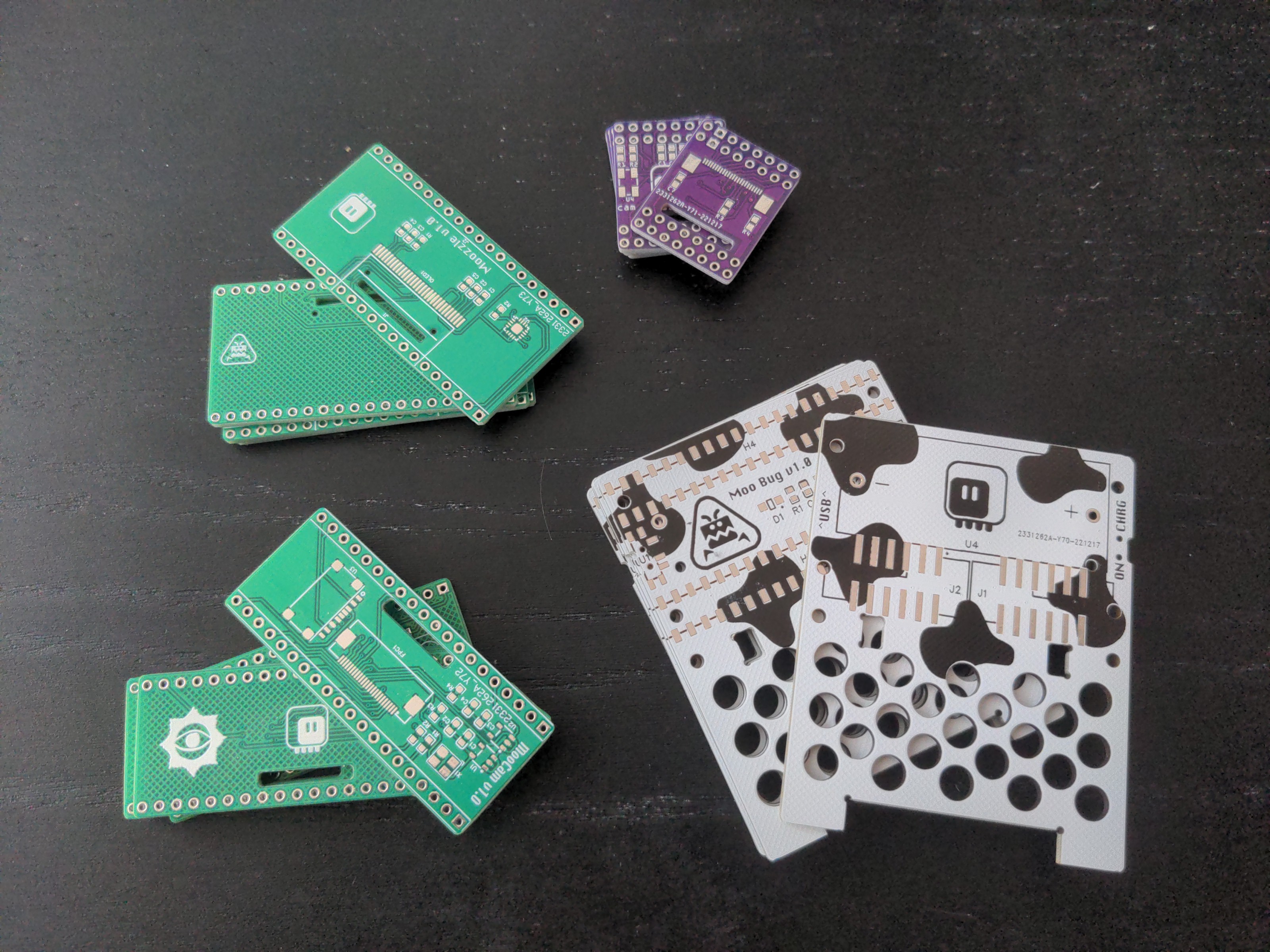
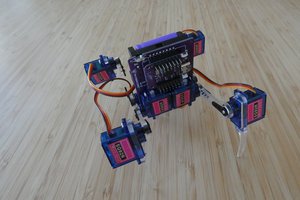
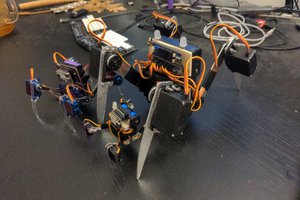
deʃhipuSome time ago I decided that the SAMD21 chip I originally used for the #Fluffbug is not powerful enough, and impossible to get anyways due to chip shortage, and I identified two options I could go with, ESP32-S2 and RP2040. In the end I went with the Lolin S2 Mini board and the ESP32-S2 chip, but I never stopped thinking how would the things go if I went the other way. And then the Raspberry Pi Pico W board was released, adding WiFi to RP2040, and it became even more tempting to try it with the robots. I resisted several months, but eventually caved in, and this is it: Moo Bug, a Fluffbug with a Pi Cow ("pico w", get it?).
0%
0%
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests