 deʃhipu
deʃhipuWhere are my robots? It's already 15 years into the twenty-first century, and we still don't have robots everywhere. Sure, there are some simple vacuum cleaners and some robo-pets for the ultimate geeks, but that is not enough! Especially since the vacuum cleaners don't even walk. We need more walking robots everywhere!
I think that one of the reasons why we don't have robots creeping and crawling all around us is that researching walking robots is a time-consuming, hard, and very expensive activity, traditionally confined to the secret military laboratories. You need a big room with a crane to hang your robot on, in case it falls, you need lots of hydraulic actuators and a pump to power them, you need sophisticated sensors and complex algorithms crunched on powerful computers, etc. At least that's how it has been so far. Even building a simple hexapod from a kit, which, is not much more than a simple toy, can set you back hundreds of dollars. No wonder we make no progress.
That has to change. If we put a walking robot on the desk of every high school student out there, and let them try hack on them and try the craziest ideas, sooner or later someone will come up with a bunch of cool tricks that let you solve that leg trajectory optimization problem on an Arduino at 50Hz a second, instead of a supercomputer crunching on a single frame whole day. We have a lot of corners we can cut there. Plus, those same high school students are likely going to continue their experiments and research and graduate in robotics and build us that robot butler that we always wanted. Or something.
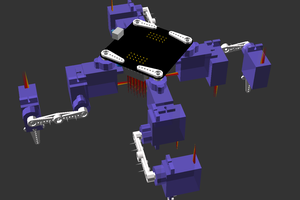
So that's my plan with Tote. To solve the humanity's burning problem of glaring lack of robots, I'm working on a robot that is suitable as a base for experimenting with robot gaits and related problems.
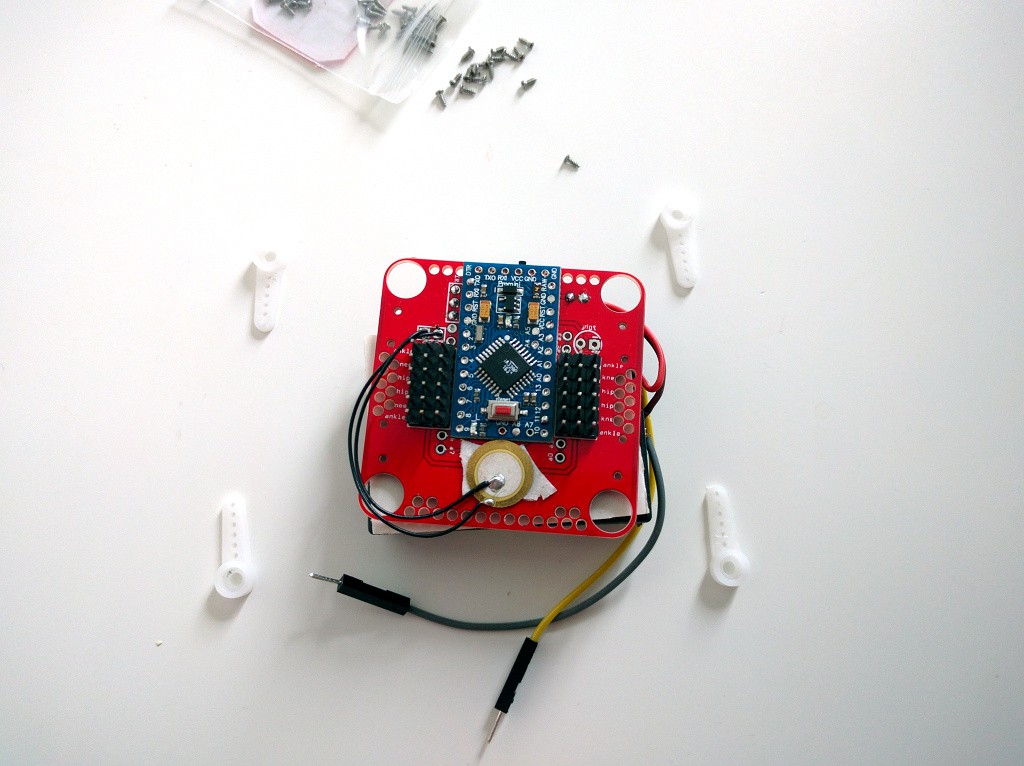
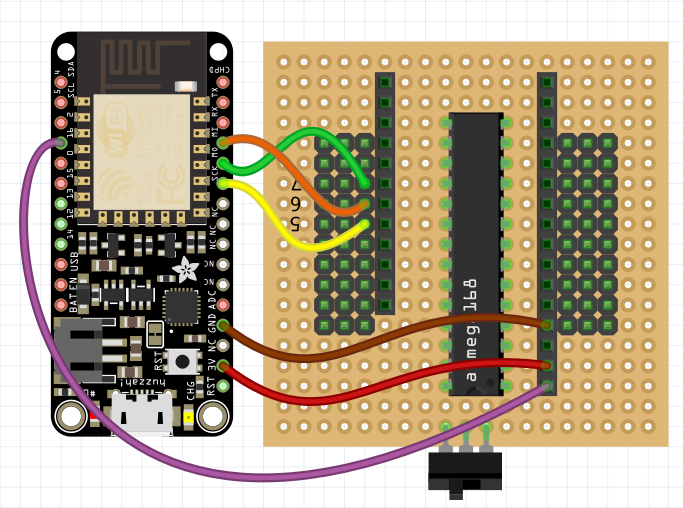 Now, in your Arduino IDE go to Files→Examples→11.ArduinoISP and select that example. Then scroll to around line 68 and change this:
Now, in your Arduino IDE go to Files→Examples→11.ArduinoISP and select that example. Then scroll to around line 68 and change this:

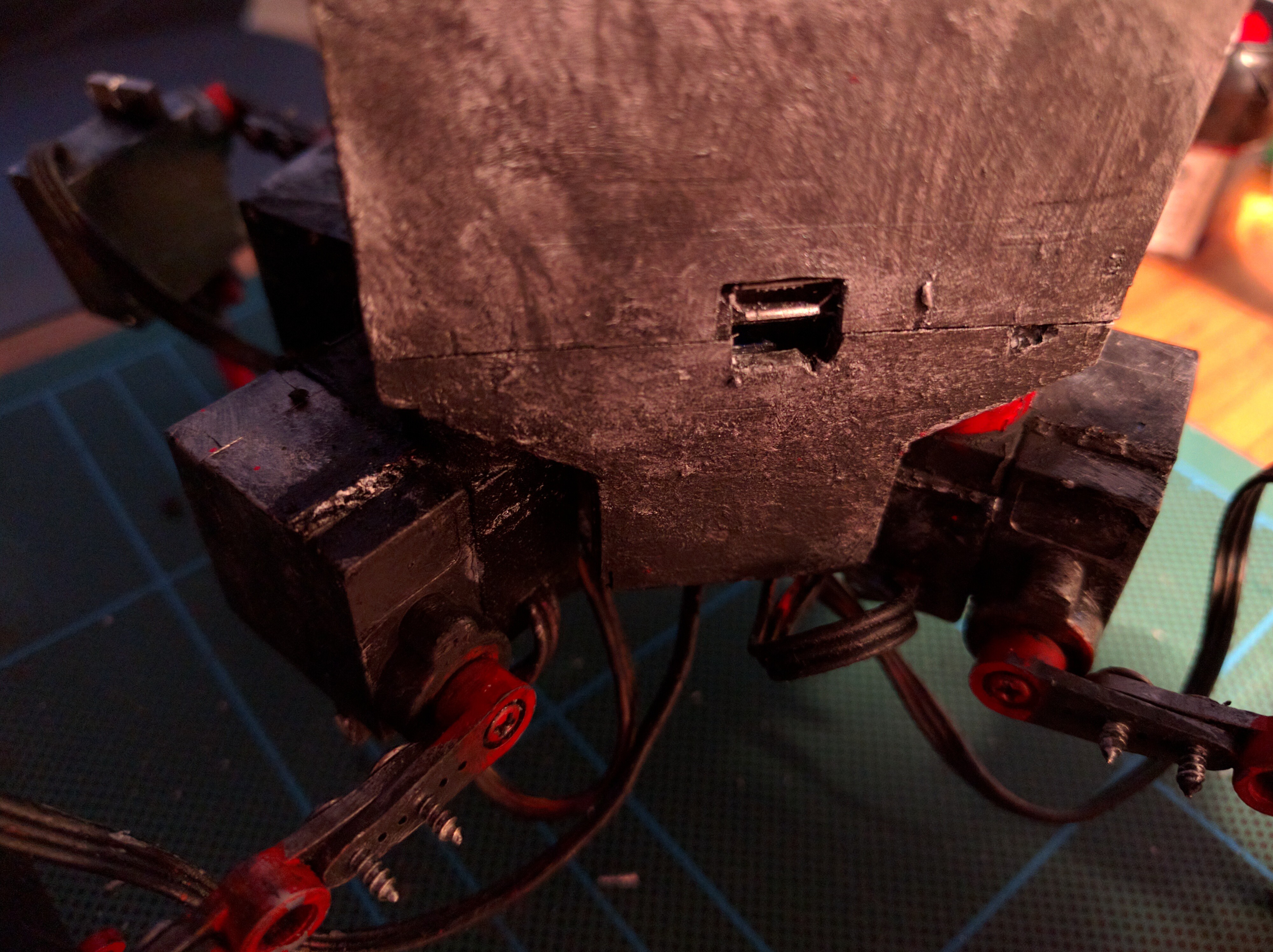
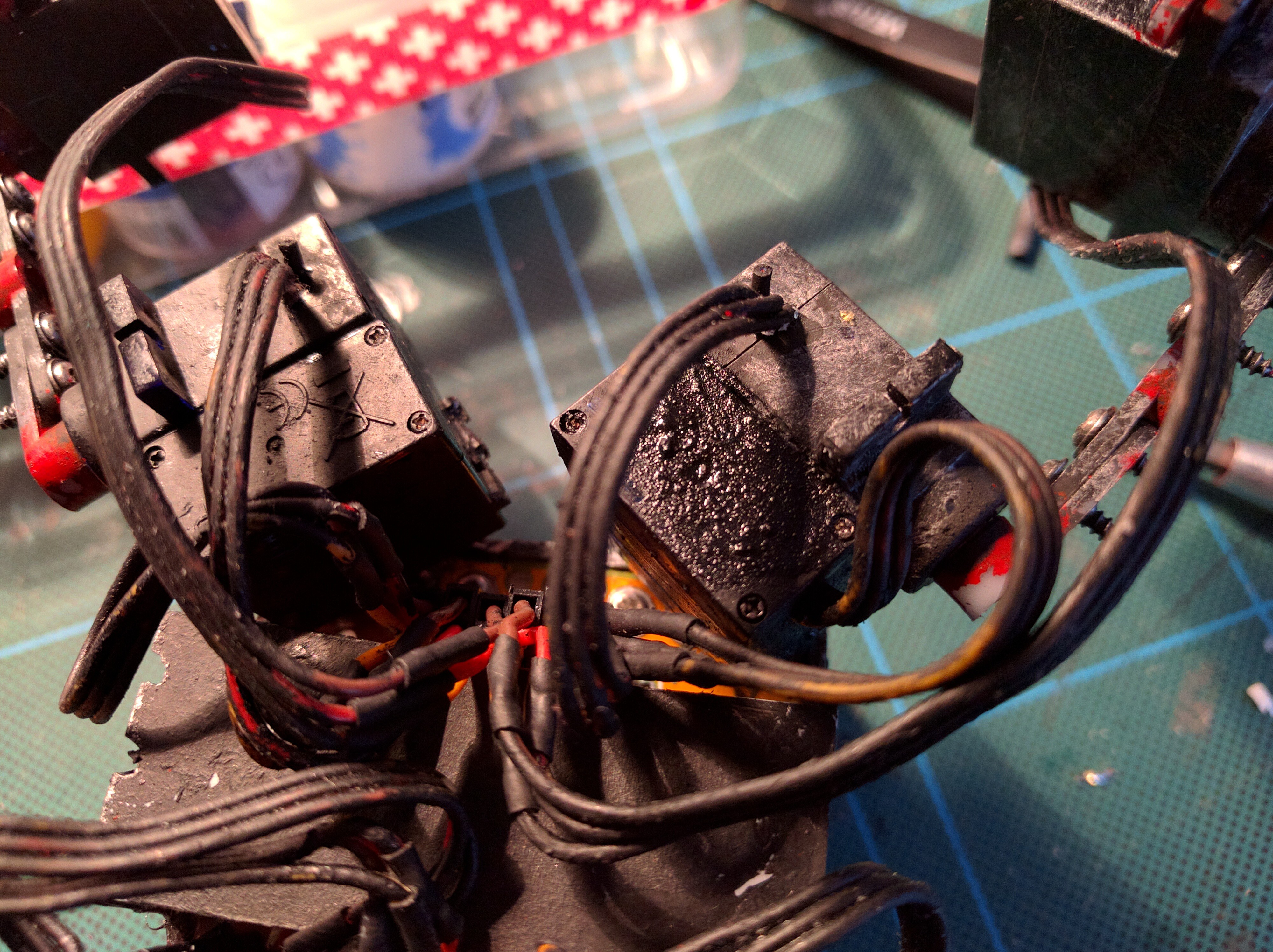
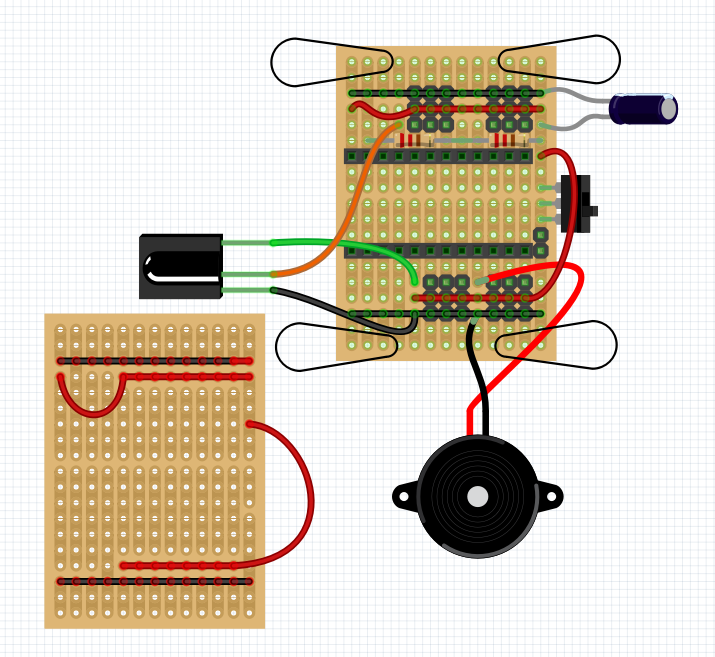
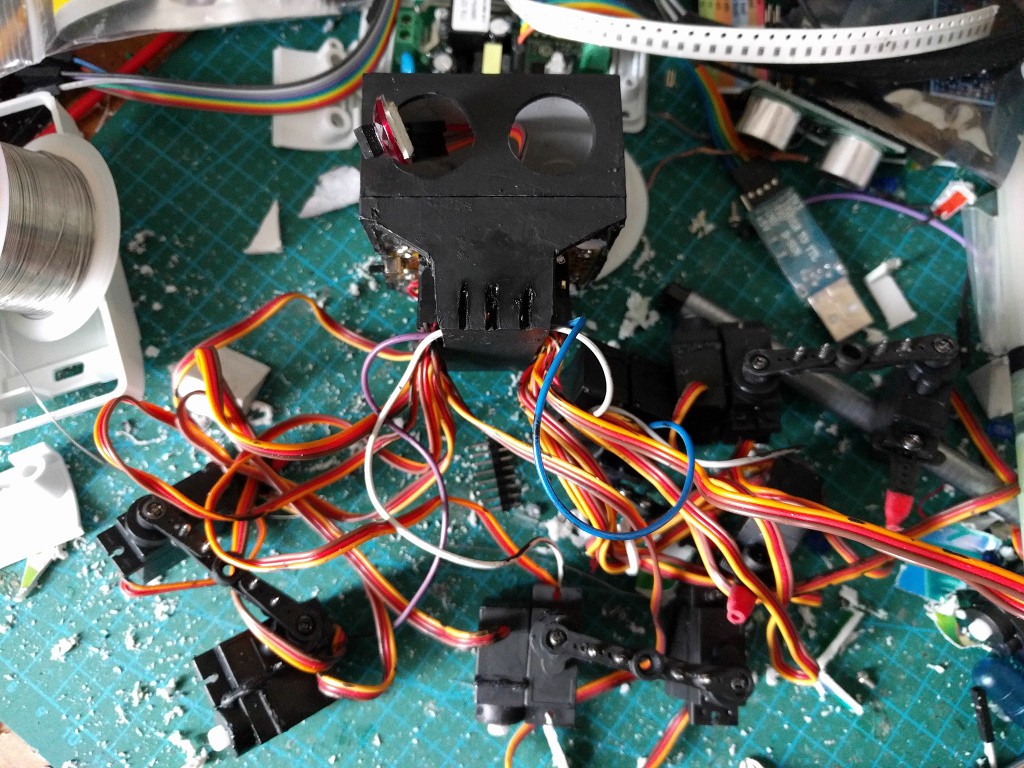
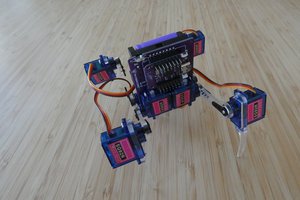
 Then I removed the legs from the robot, and installed the PCB inside the box:
Then I removed the legs from the robot, and installed the PCB inside the box: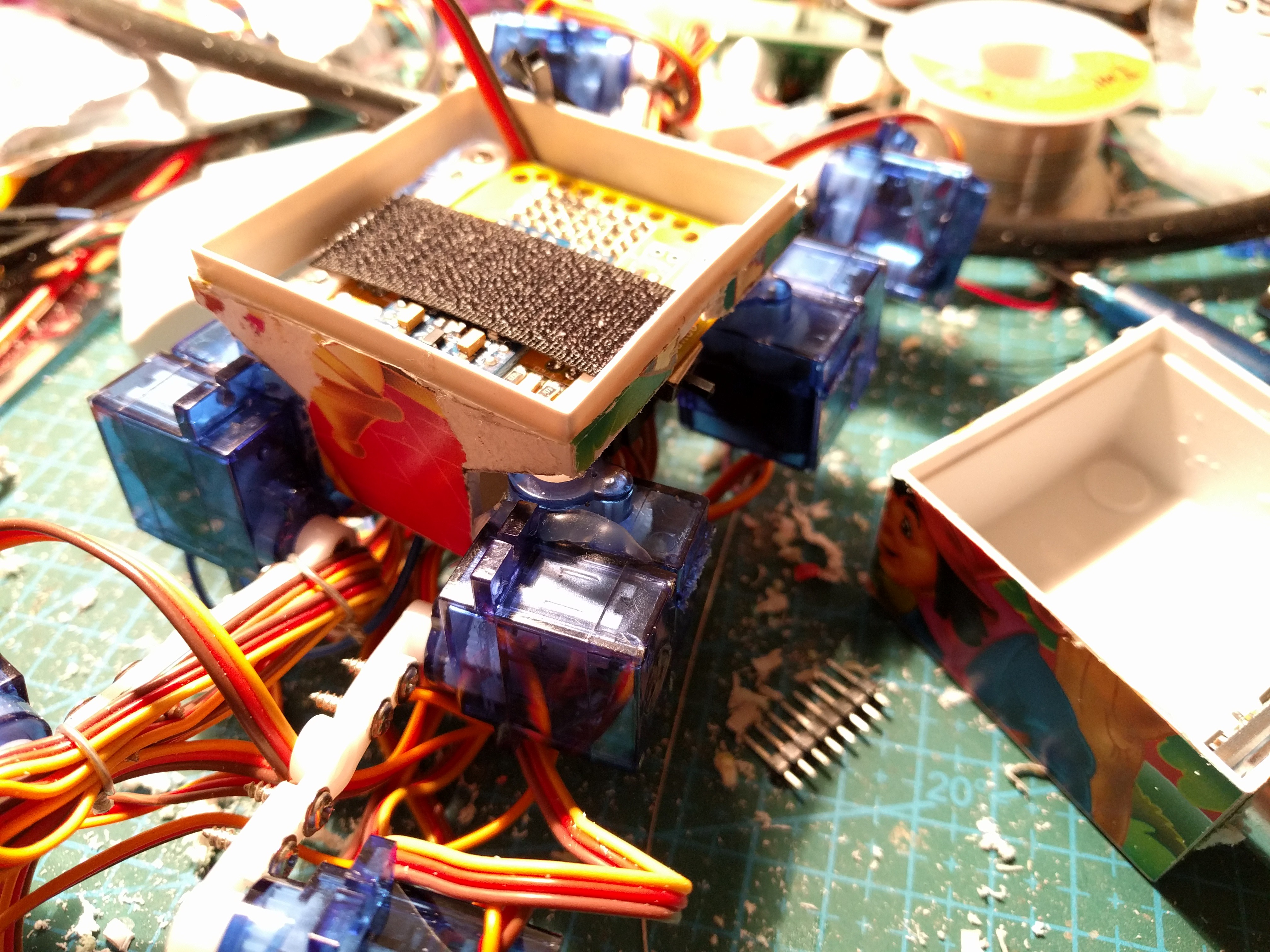
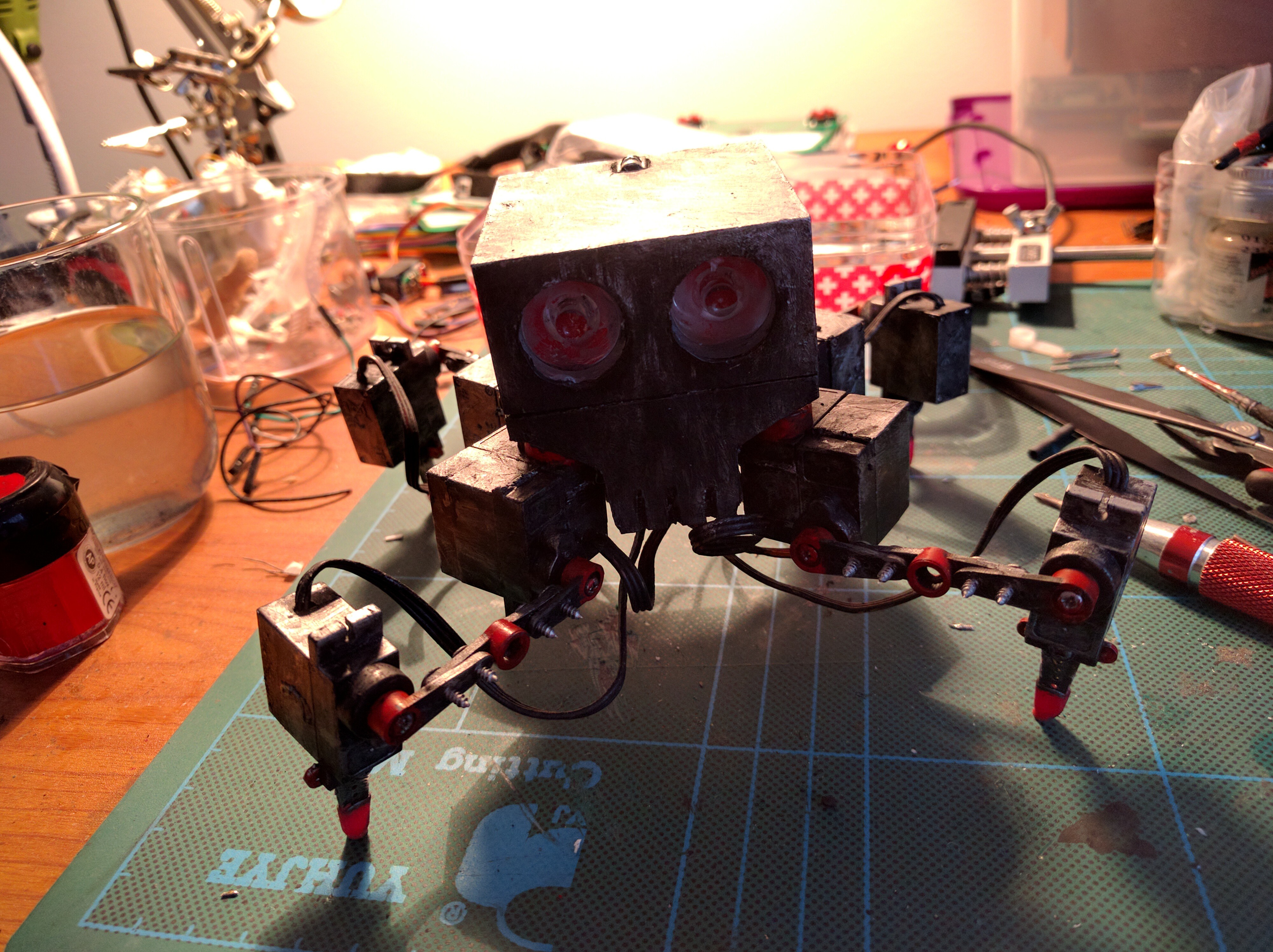
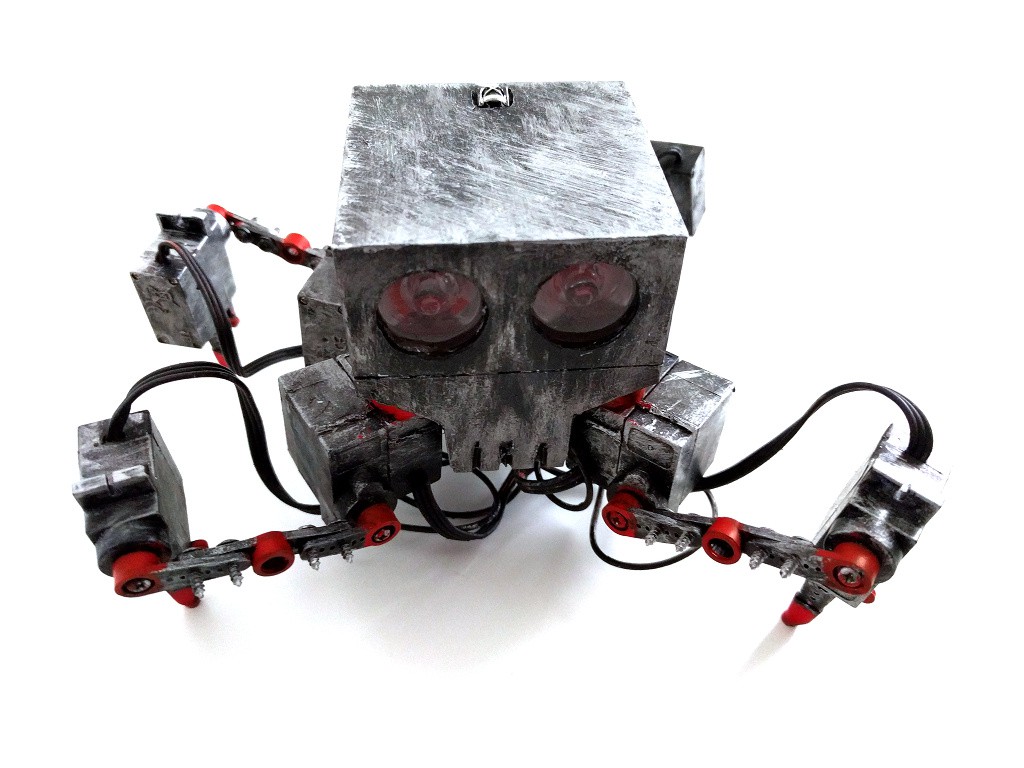
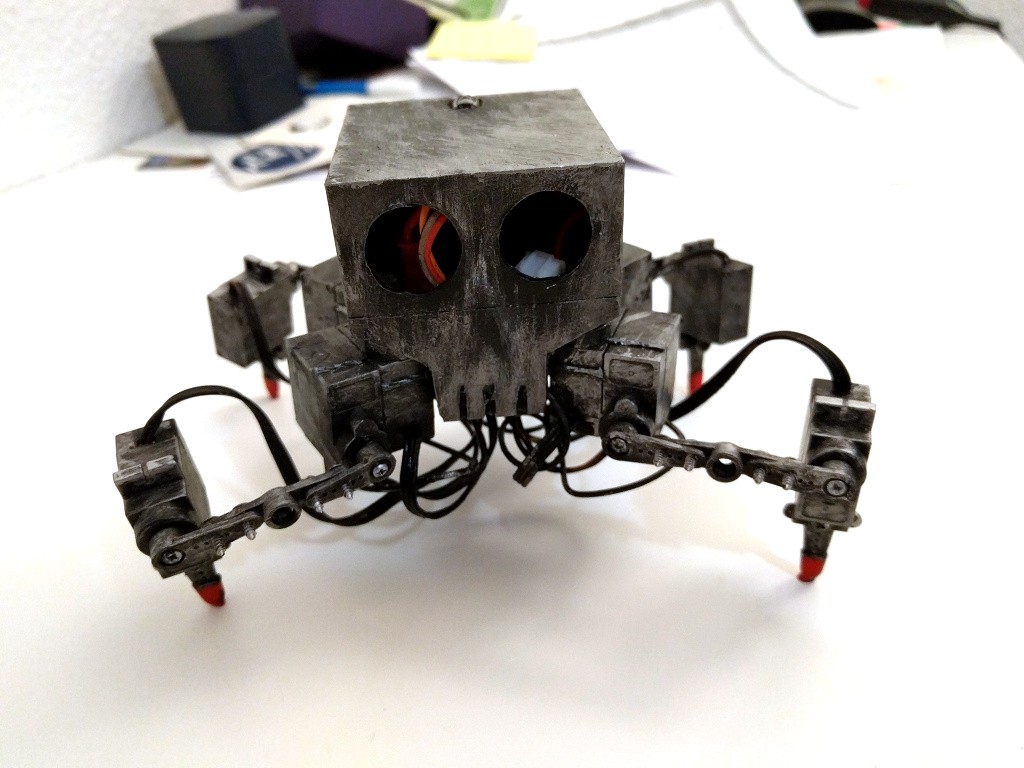
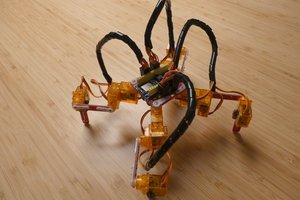
 Once I had the base coat ready and it all dried, I started to dry-brush some of the wear and old paint on it, then dry-brushed the whole thing with metallic paint, to make it look like beaten metal.
Once I had the base coat ready and it all dried, I started to dry-brush some of the wear and old paint on it, then dry-brushed the whole thing with metallic paint, to make it look like beaten metal.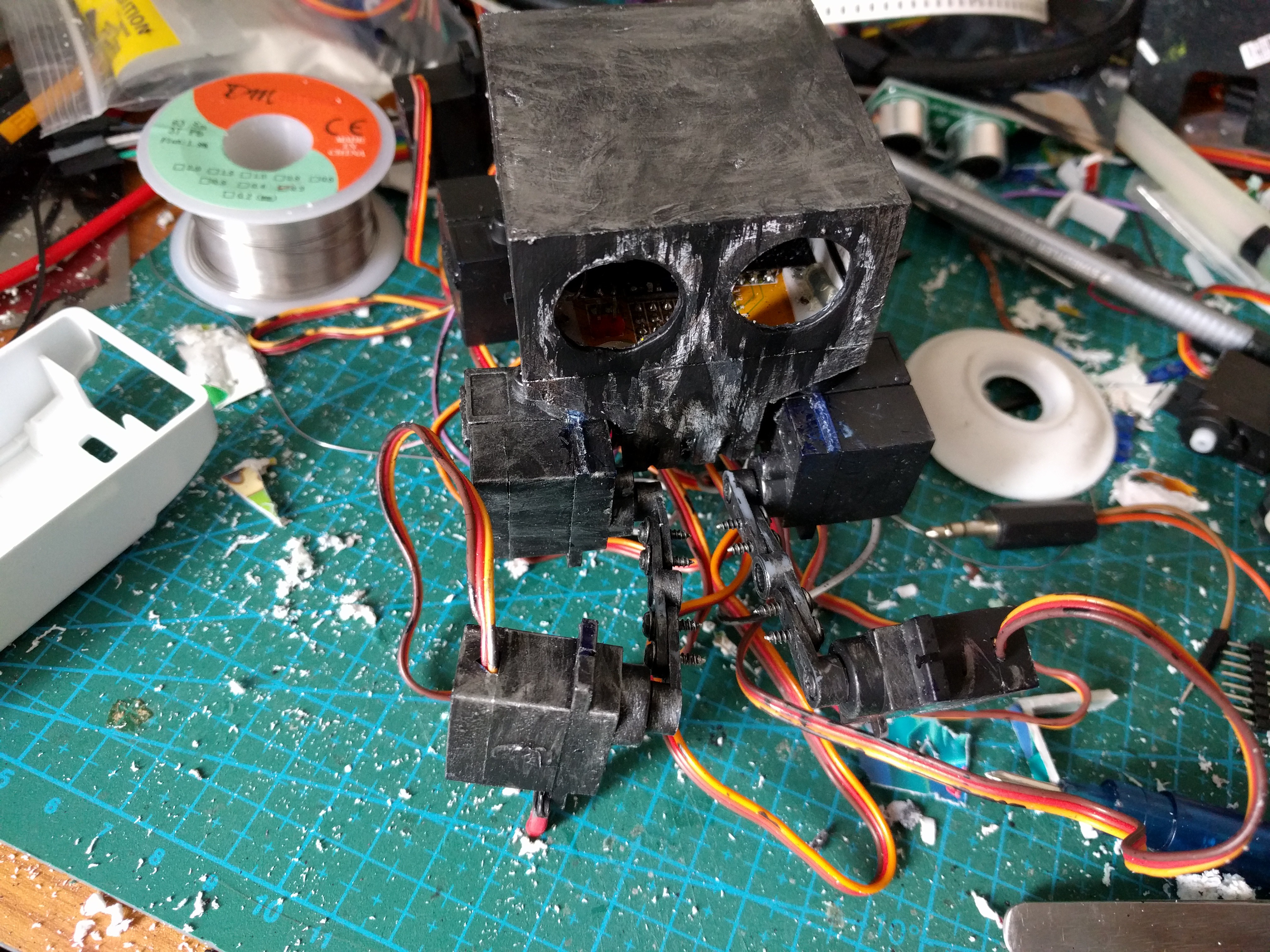









i am responding about the comment below/above regarding an extra leg servo, and then an extra foot servo. Im sure the price is astounding, meaning the hobbyist cant possibly afford it yet, but rather than a foot servo, i was thinking just last night that the fiber that contracts like muscles might be a good foot addition. Rather than rotation, it would work like a spring, it could possibly bring easier jumping to spider shaped robots by giving them a sort of heel. The leg would bend away from the body towards the end of the foot, and would pull in two directions, in and out. This might also help stabilize the foot when trying to manipulate objects, and also might improve climbing stability. As i said, though, i doubt they are anywhere near the cost of a hobby servo , being relatively new and (guessing) probably still intillectual property.