The needed items :
- Arduino Uno R3
- Breadboard
- Motor Driver Shield
- Wheels [x4]
- IR Sensor
- Battery
- Battery Holder
- Female Jumper Wire
- DC Power Switch
- Plastic board
- Rubber bands [x4]
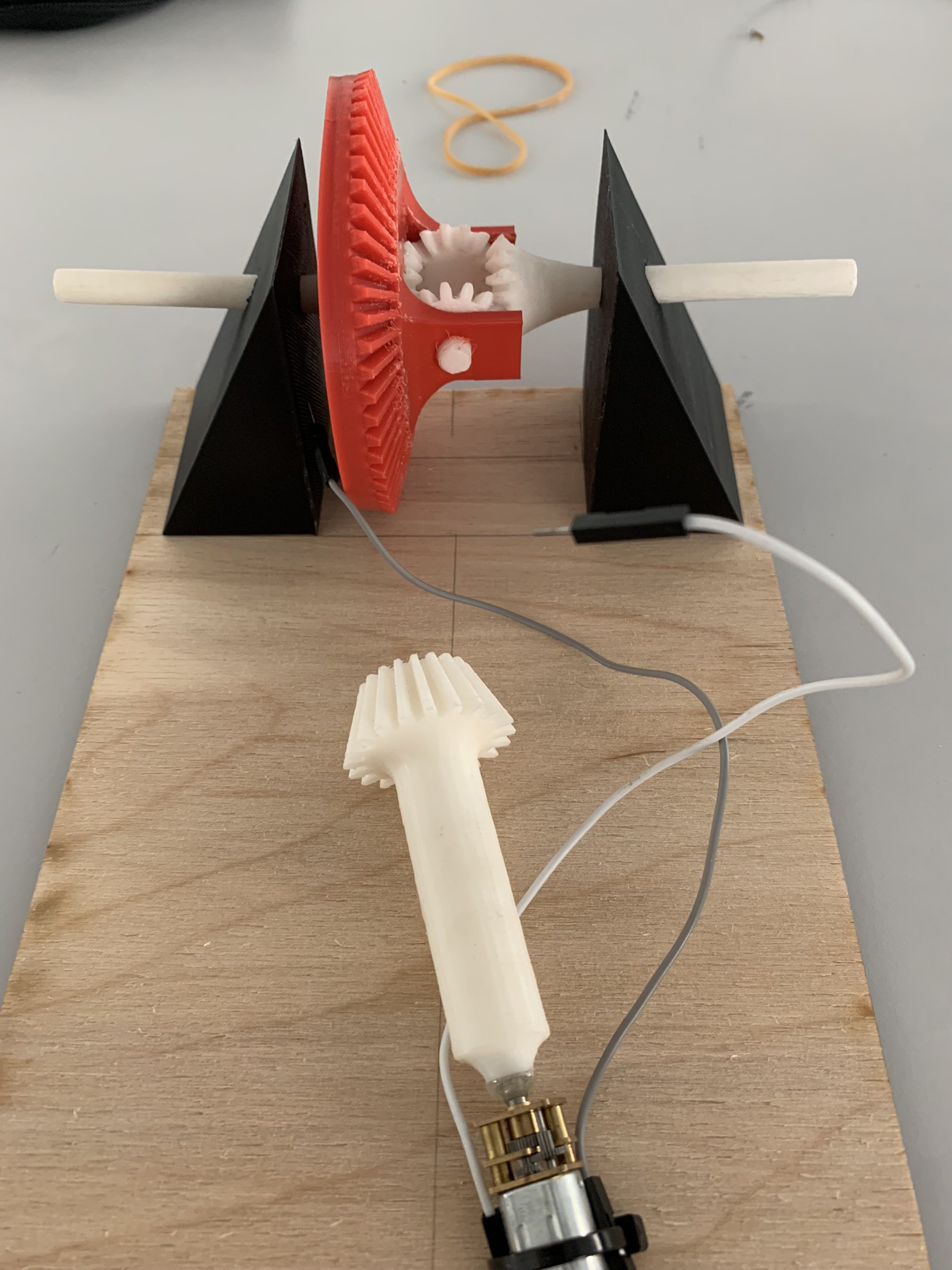
Arduino Car :
- Moving follow the line
- Distinguish the color of the floor
- Telecommande
- Cool decoration and design
- Stop when the route ends


 Alex Dunnett
Alex Dunnett
 jasonwinfieldnz
jasonwinfieldnz

Modern automakers try to satisfy the desires of their consumers and release to the market those cars that will really be in demand. For example, the Opel Zafira https://opel-vidi.com.ua/ru/model-lineup/zafira-life/configuration was produced for commercial needs. In addition, a large family with many people, for example, can buy it. In addition, additional equipment systems can be added to the car to make it more comfortable to drive.