<No, I will not collaborate with anyone, the team is just me, sorry>
The thumbnail for this project illustrates how, yes that is supposed to be a human, moves inside a virtual reality made of LRPM.
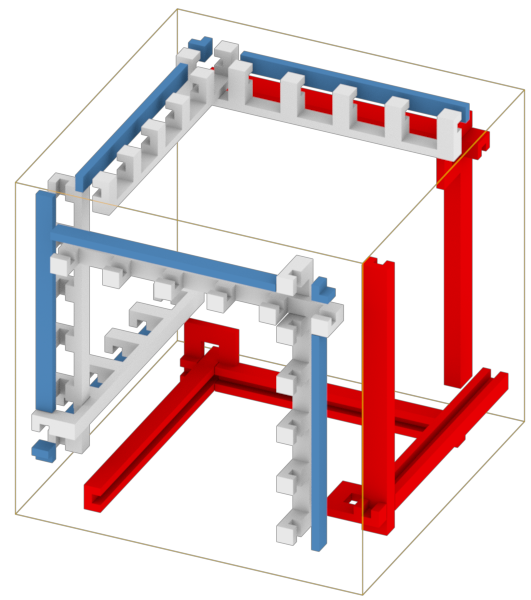
The background image shows how a couple of cubes can move each other to make two connected 3D-printers.
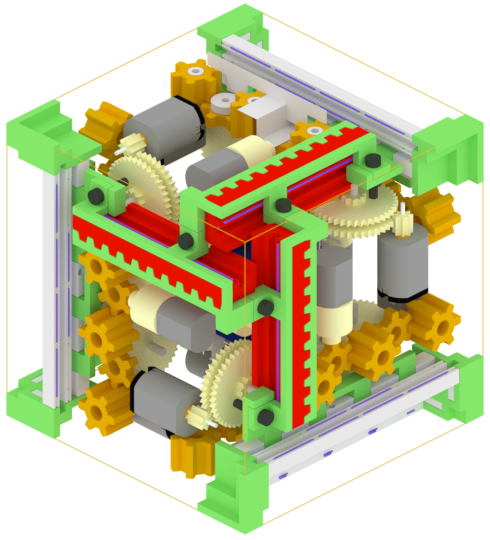
Keep in mind that each cube will look identical to every other cube, the different colors in the images is just to clarify what is what and where they've been.
Another thing to understand is that the strength of each cube doesn't have to be miraculously strong, like a 300W BLDC motor, as long as they can lift themselves, all you need to do is connect more cubes in parallel which will sum all the forces and in the end move whatever you want to move.
The cubes are dynamic, meaning that they are supposed to be able to change shape whenever, however, and also be able to stay stationary.
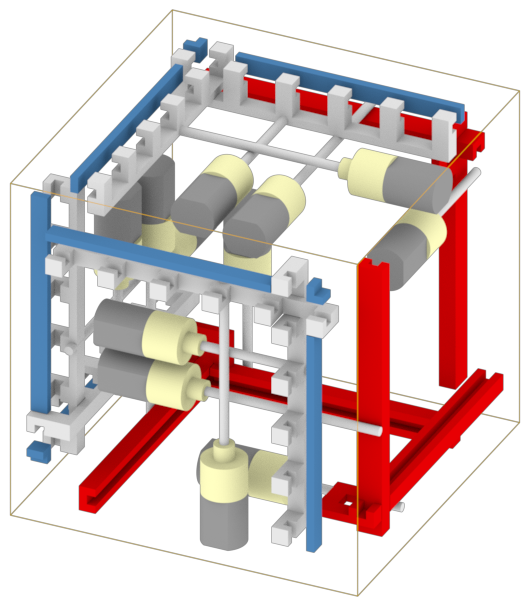
 and here's another one from another angle
and here's another one from another angle
 The black rectangular things are graphite rods (2mm diameter), and they are very rigid and works perfectly for sliding ABS on them. In the animation above they have the length 30 mm, it may look big, but everything is actually very small.
The black rectangular things are graphite rods (2mm diameter), and they are very rigid and works perfectly for sliding ABS on them. In the animation above they have the length 30 mm, it may look big, but everything is actually very small. 
 And here comes the third and last animation for the motor-multiplexer showing the reason for why it's not feasible.
And here comes the third and last animation for the motor-multiplexer showing the reason for why it's not feasible. 
![Geneva gear working in two dimensions gif [4.2MiB]](https://cdn.hackaday.io/images/original/9111881491250565433.gif)
![Geneva gear working in three dimensionsgif [4.9MiB]](https://cdn.hackaday.io/images/original/7465101491250558406.gif)


 Nolan Hergert
Nolan Hergert
 Benchoff
Benchoff
 Jeroen Delcour
Jeroen Delcour
 kmatch98
kmatch98
Out of curiosity, where are you sourcing your gears/shafts/suitable motors? Thanks