Ezu
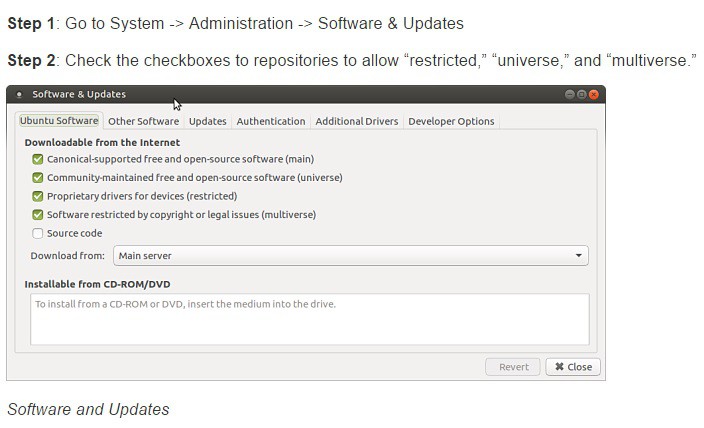
EzuStep 1: Go to System -> Administration -> Software & Updates
Step 2: Check the checkboxes to repositories to allow “restricted,” “universe,” and “multiverse.”
Step 3: Setup your sources.list
| 1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' |
Step 4: Setup your keys
| 1 | wget http://packages.ros.org/ros.key -O - | sudo apt-key add - |
Step 5: To be sure that your Ubuntu Mate package index is up to date, type the following command
| 1 | sudo apt-get update |
Step 6: Install ros-kinetic-desktop-full
| 1 | sudo apt-get install ros-kinetic-desktop-full |
Step 7: Initialize rosdep
| 1 | sudo rosdep init |
| 1 | rosdep update |
Step 8: Setting up the ROS environment variables
| 1 | echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc |
| 1 | source ~/.bashrc |
Step 9: Create and initialize the catkin workspace
| 1 | mkdir -p ~/catkin_workspace/src |
| 1 | cd catkin_workspace/src |
| 1 | catkin_init_workspace |
| 1 | cd ~/catkin_workspace/ |
| 1 | catkin_make |
Step 10: Add the catkin_workspace to your ROS environment
| 1 | source ~/catkin_workspace/devel/setup.bash |
| 1 | echo “source ~/catkin_workspace/devel/setup.bash” >> ~/.bashrc |
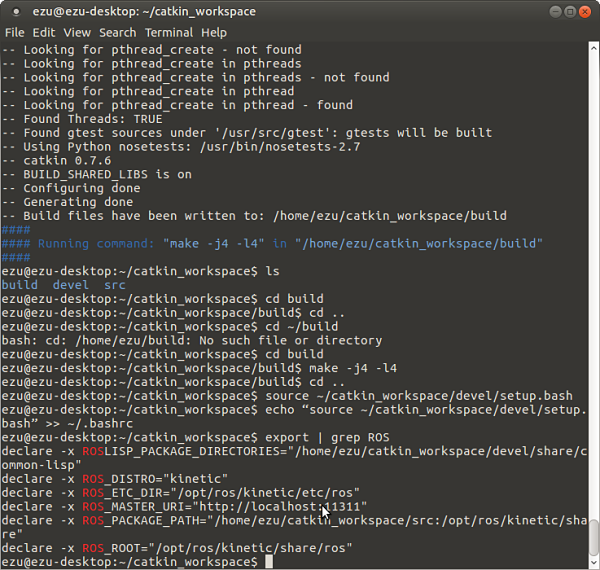
Step 11: Check the ROS environment variables
| 1 | export | grep ROS |
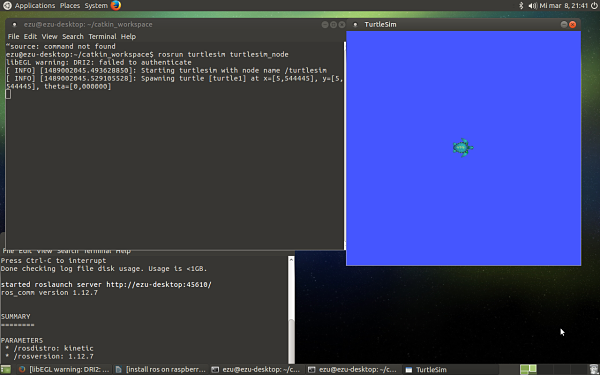
Check the ROS installation
- Open a new terminal and type: roscore
- Open a new terminal and type: rosrun turtlesim turtlesim_node
 Dmitry
Dmitry