 Daren Schwenke
Daren SchwenkeMy current MIDI pedals are wearing out, so I'm building some new ones.
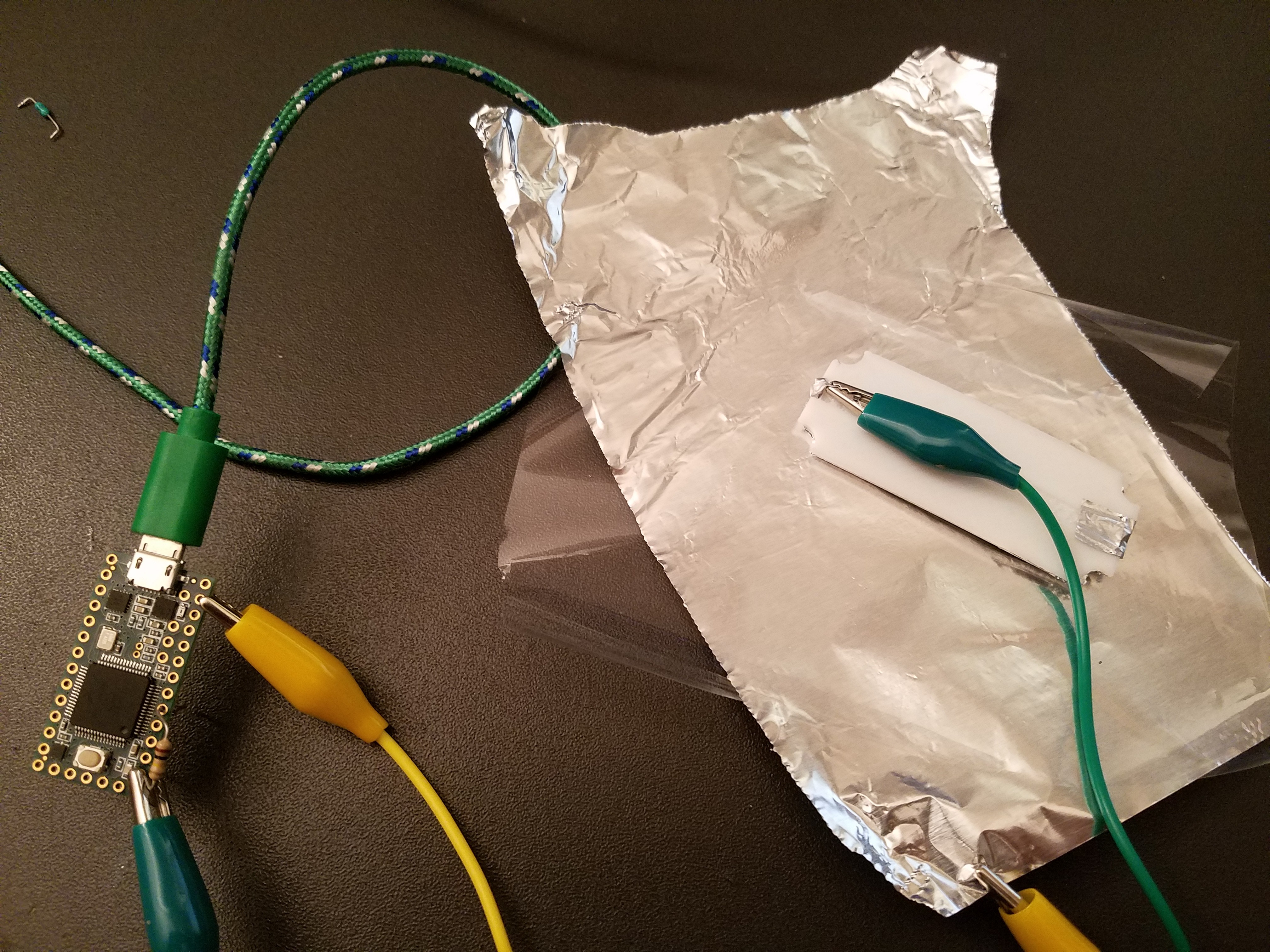
Goal is to be able to directly wire to the Teensy and require no external electronics.
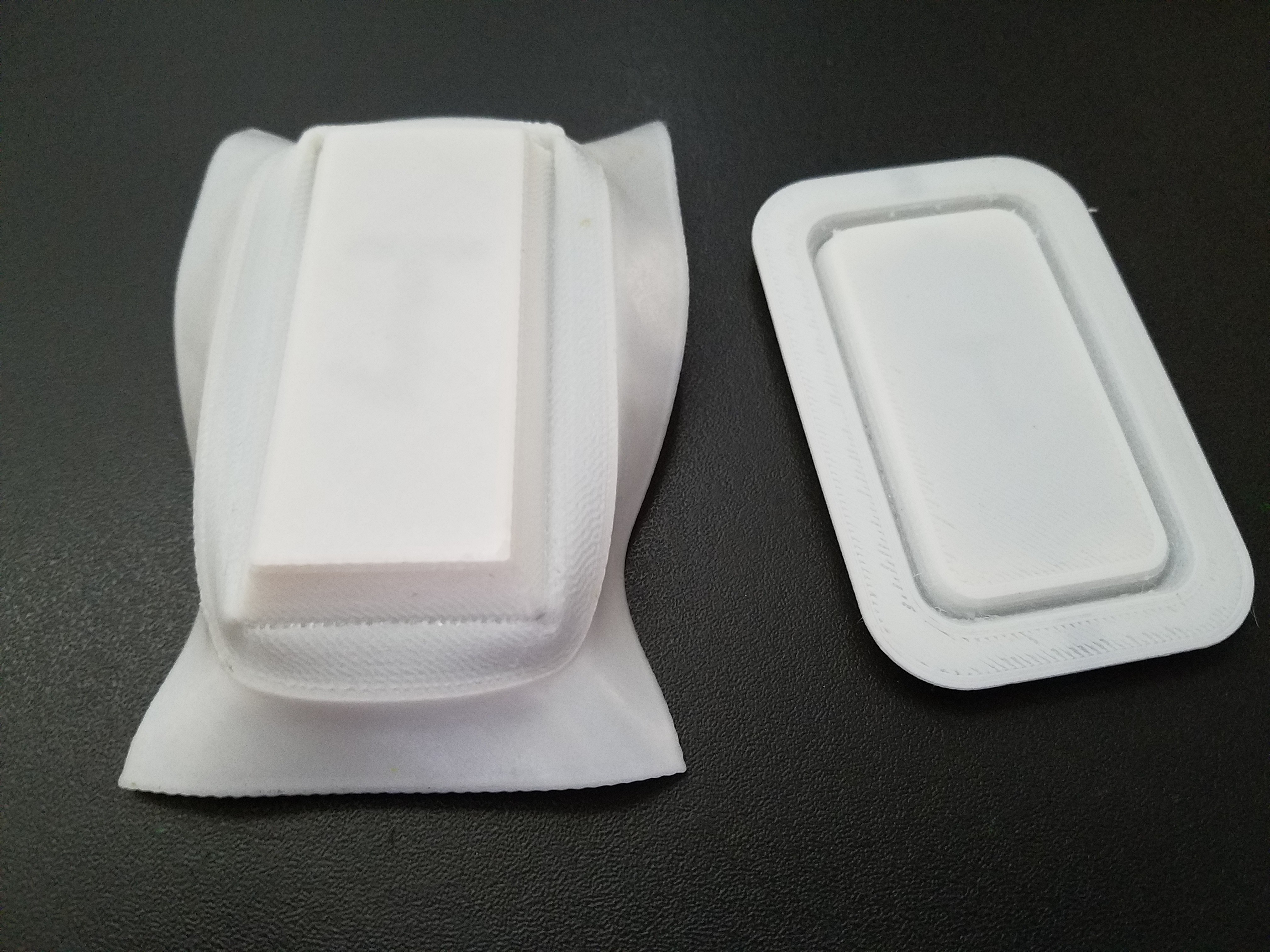
Design has migrated from using home made FSR resistors to a novel 3D printed pressure sensitive capacitor.
Current code works for 16 channels with lots of headroom to spare.
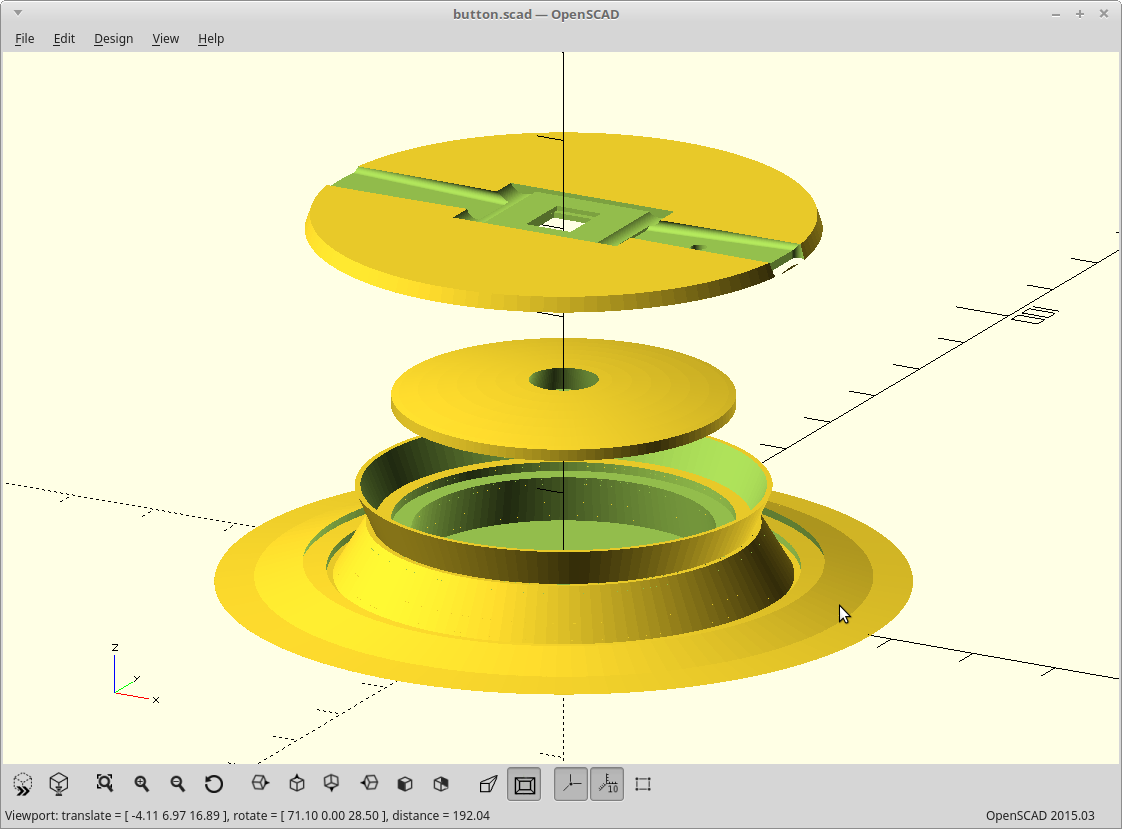
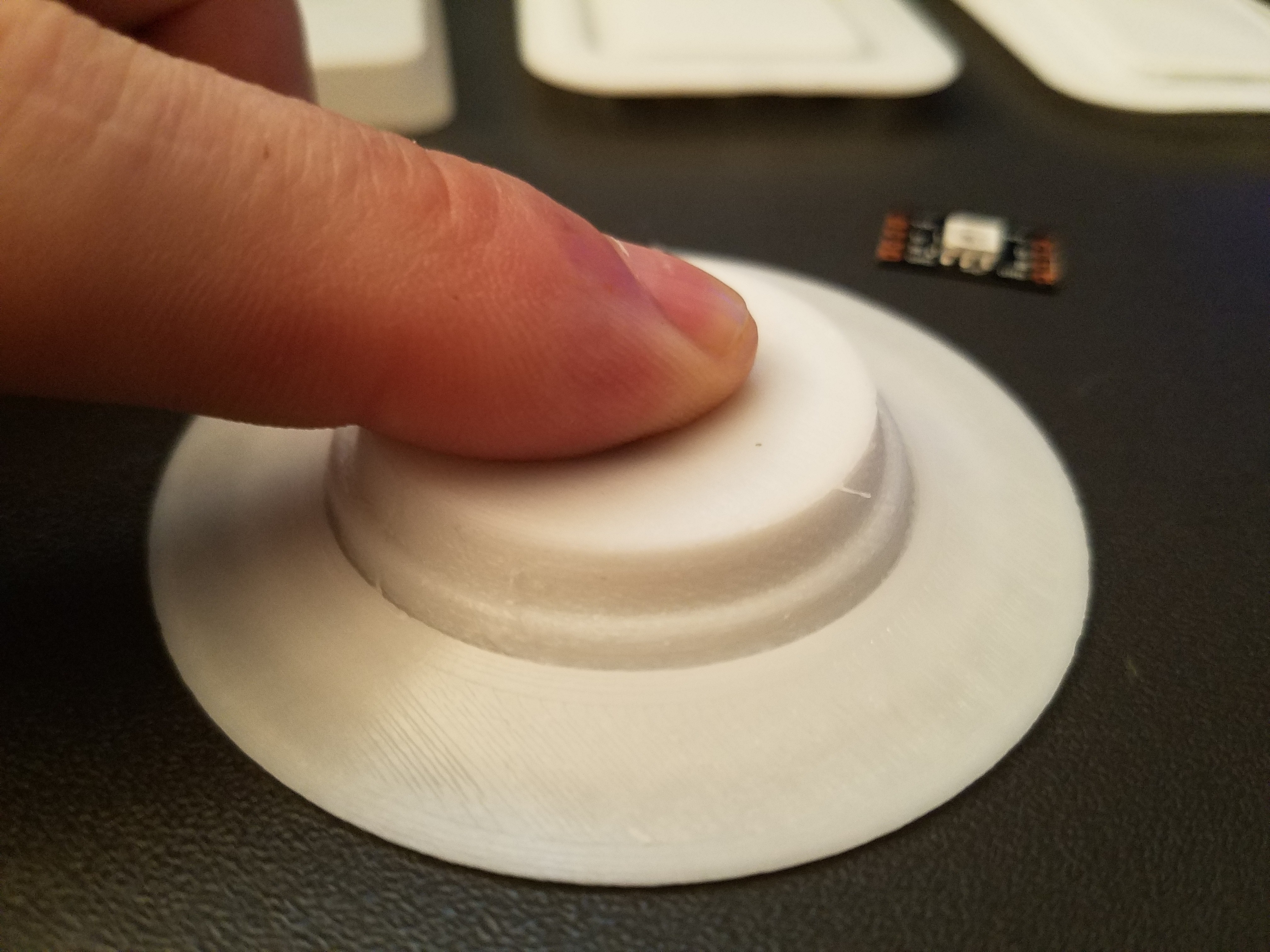
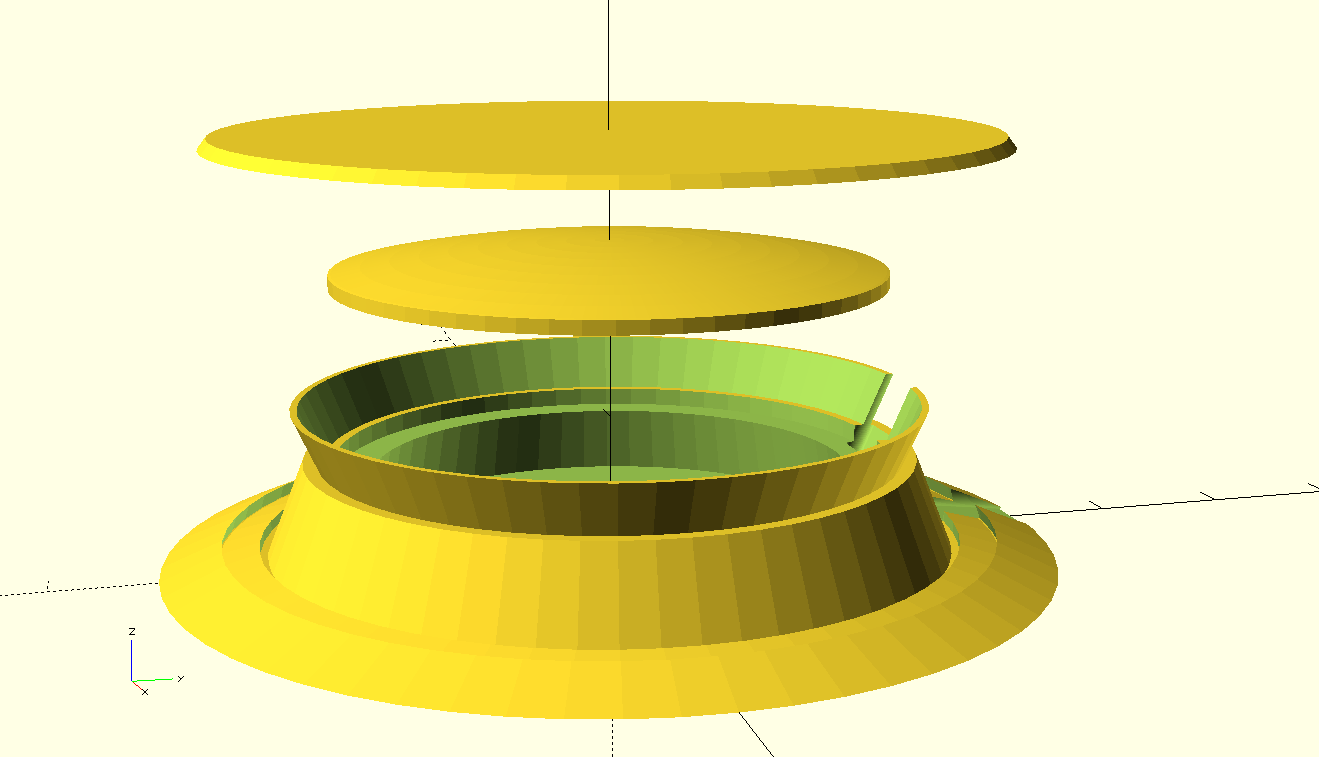
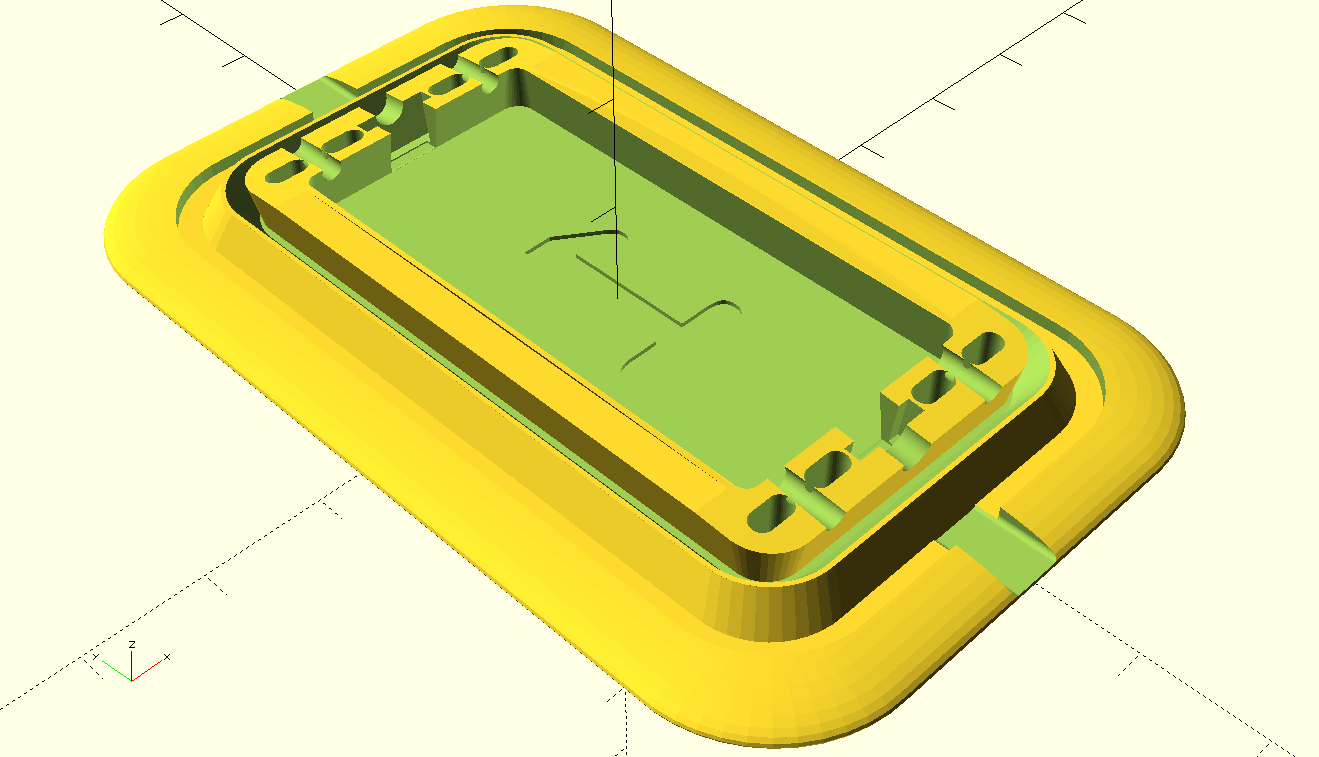
Current work is on designing the physical foot pad for no supports printing and blinken-lightyness.


 Daniel Johnson
Daniel Johnson
 Kirschner Christoph
Kirschner Christoph
 Timo Birnschein
Timo Birnschein
 Stefan-Xp
Stefan-Xp