0%
0%
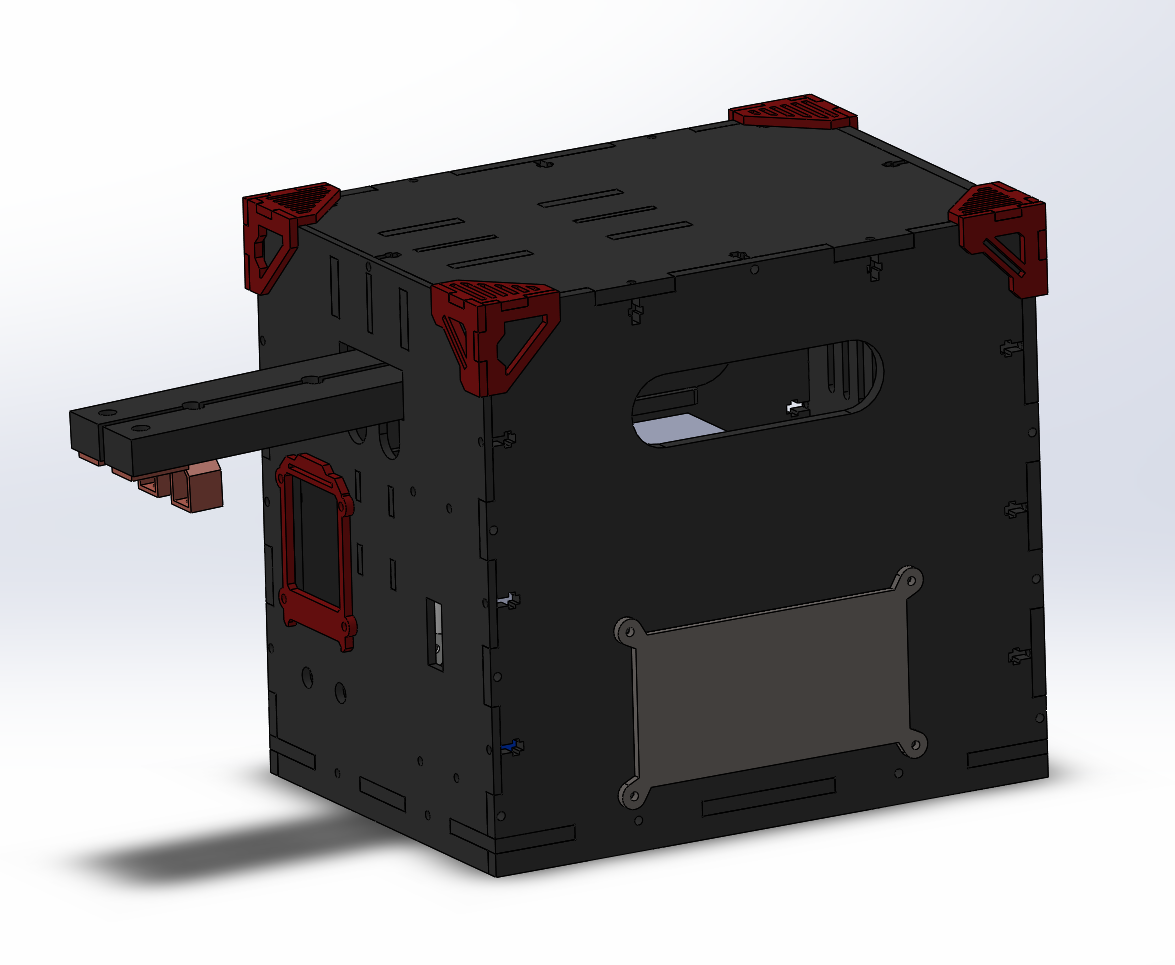
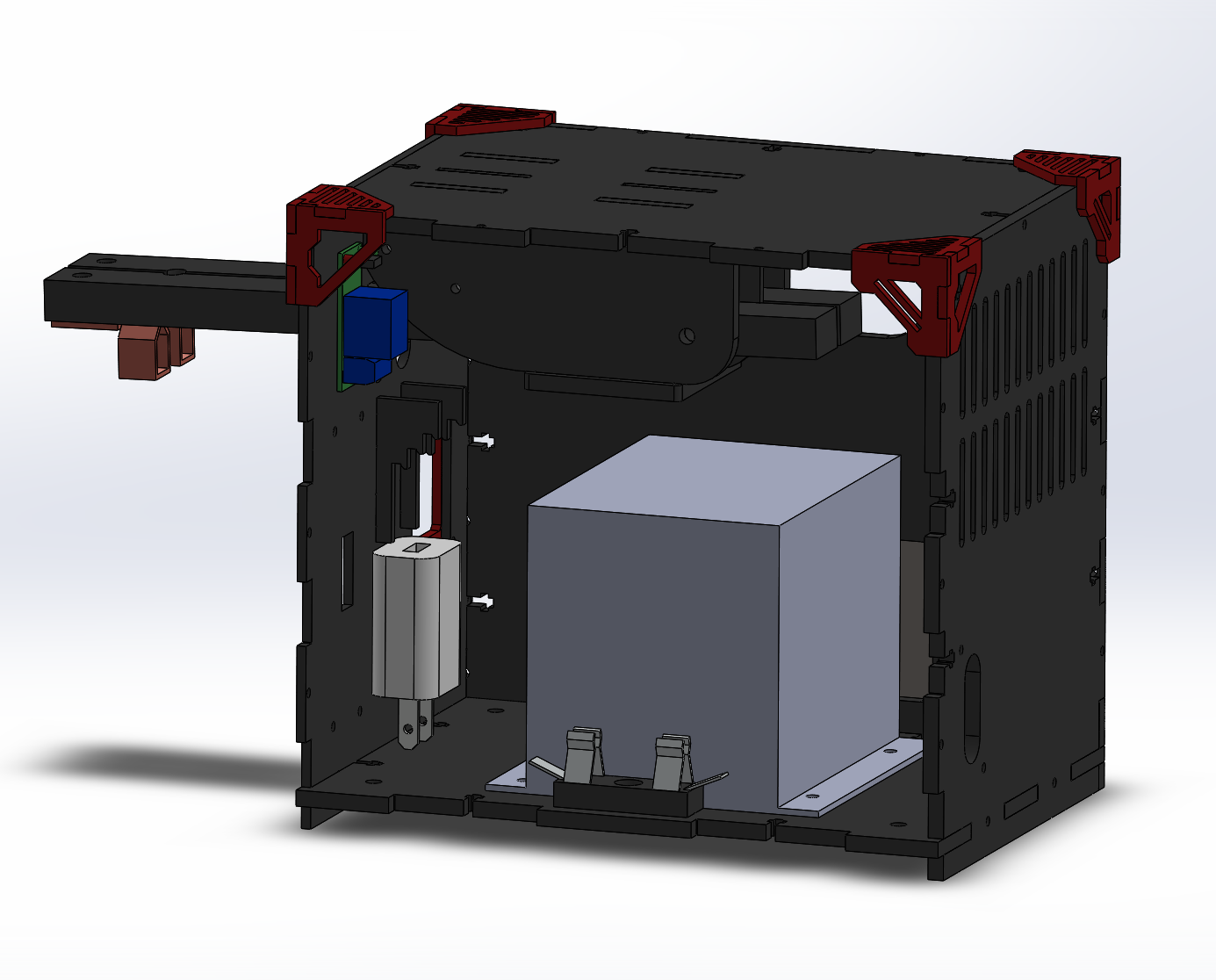
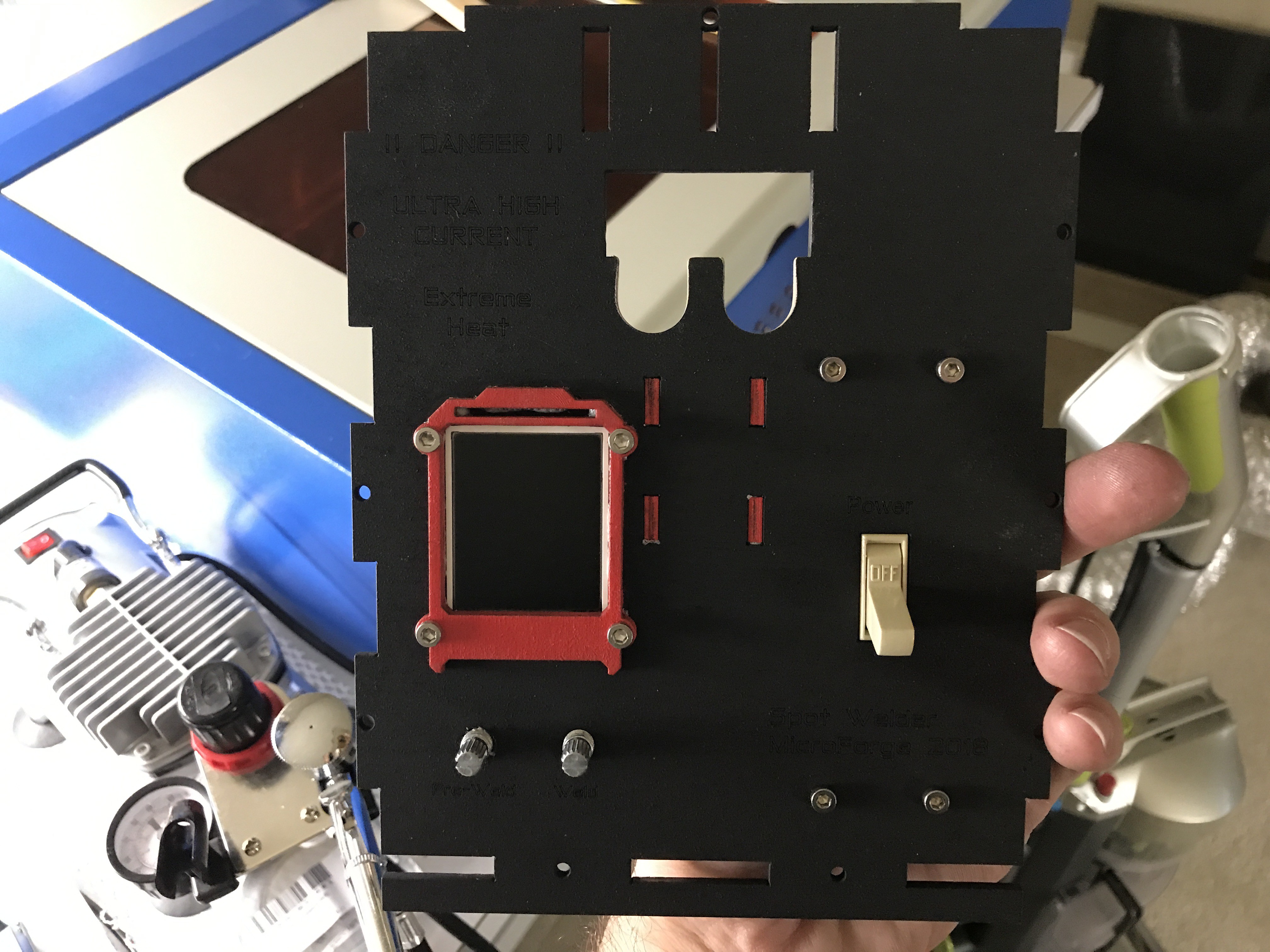
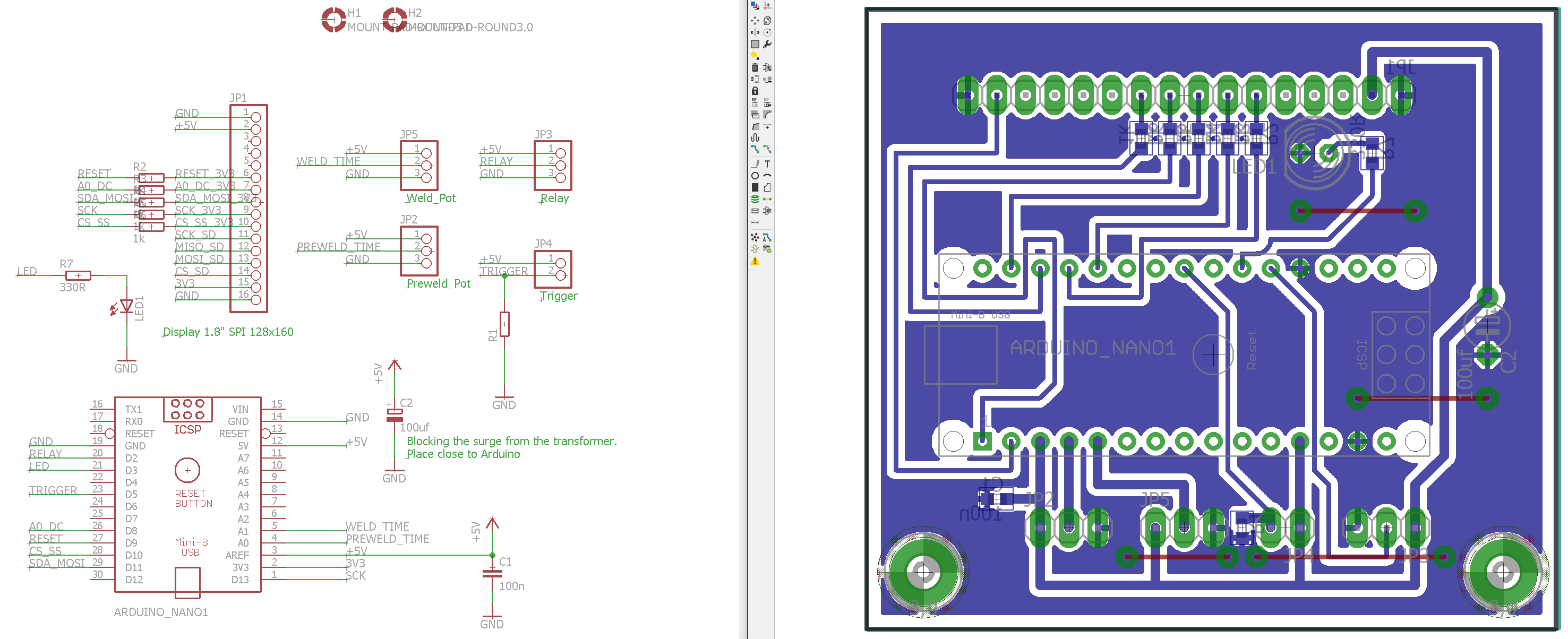
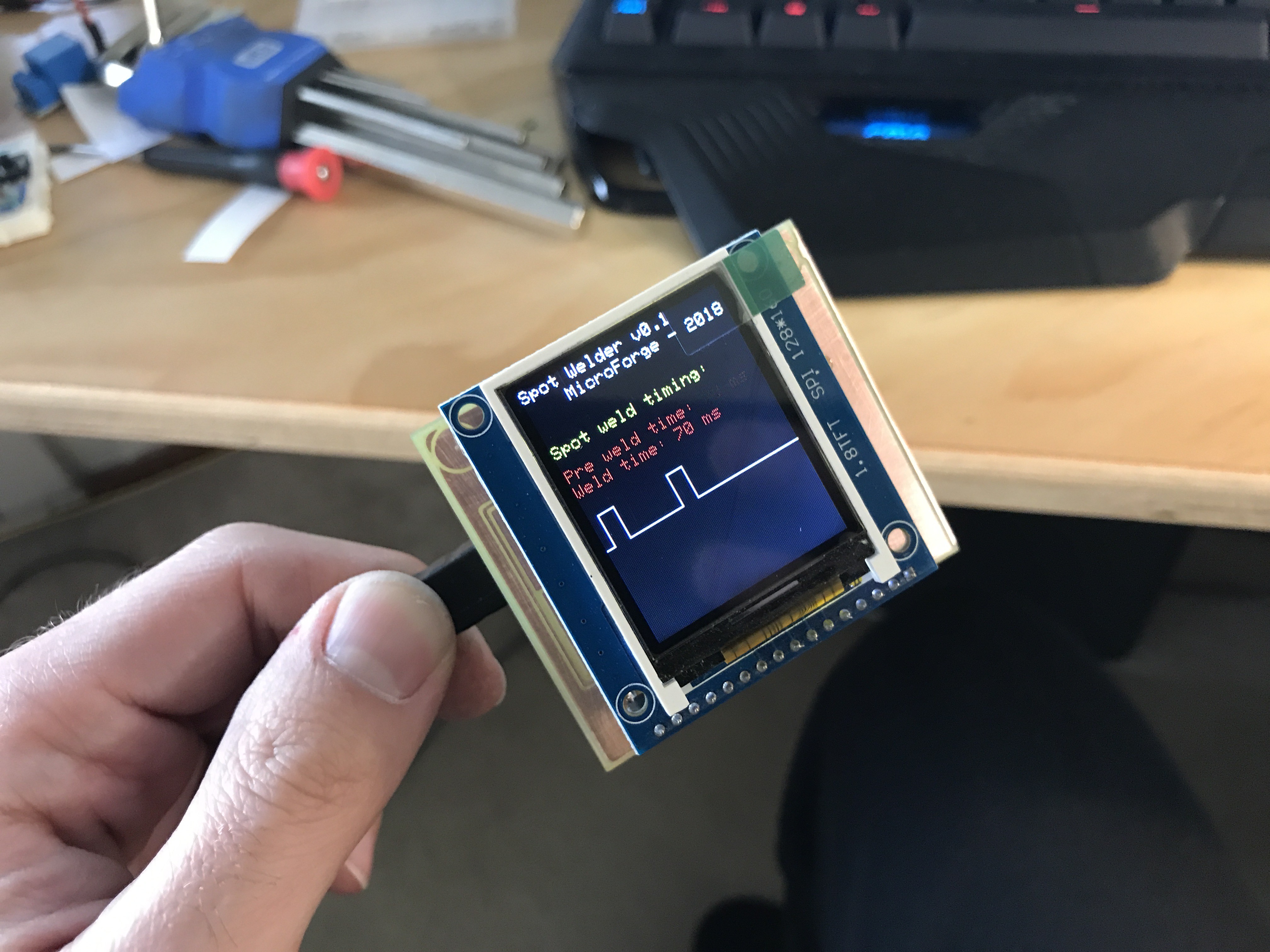
DIY Spot Welder for Creating Battery Packs
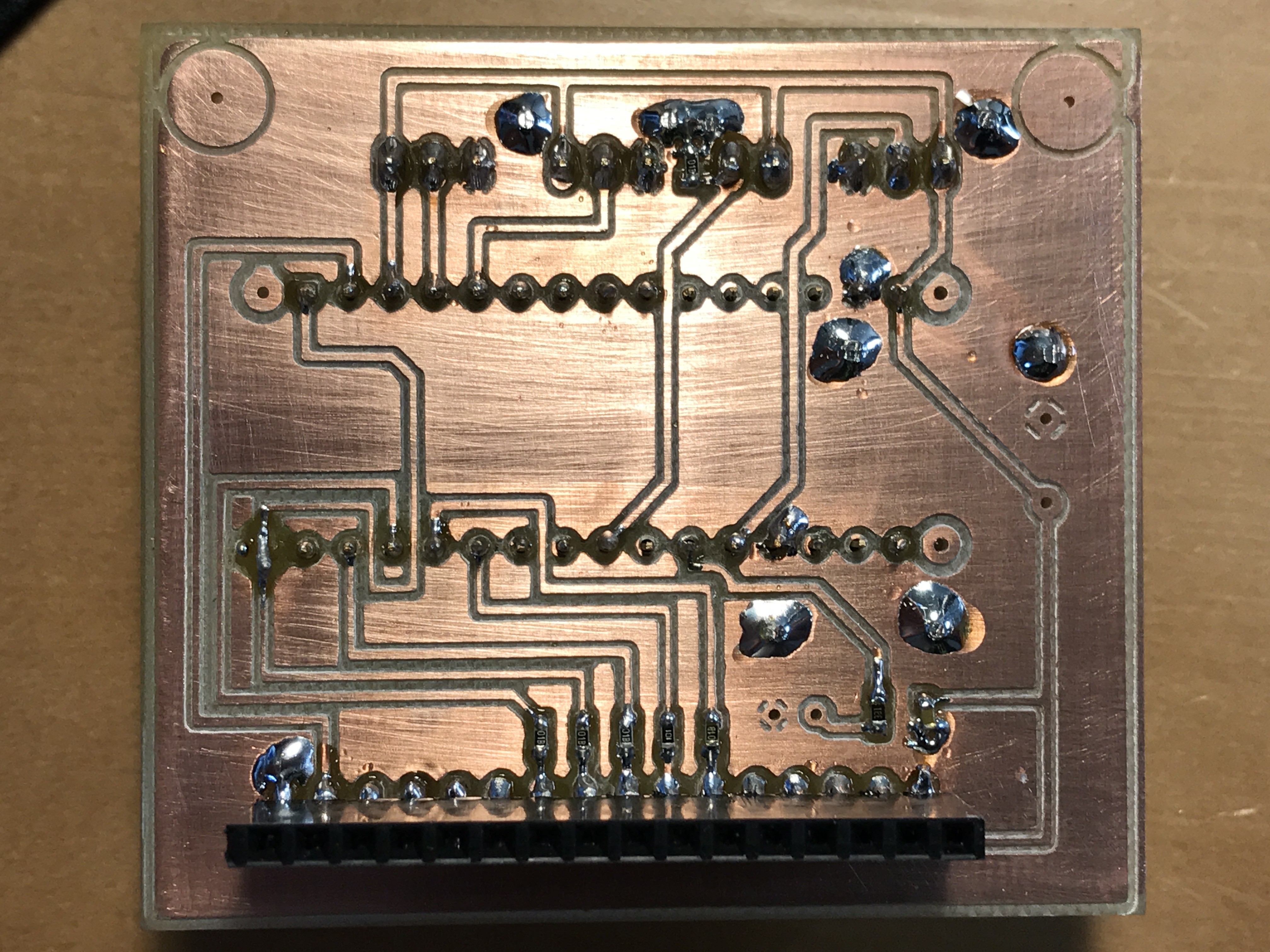
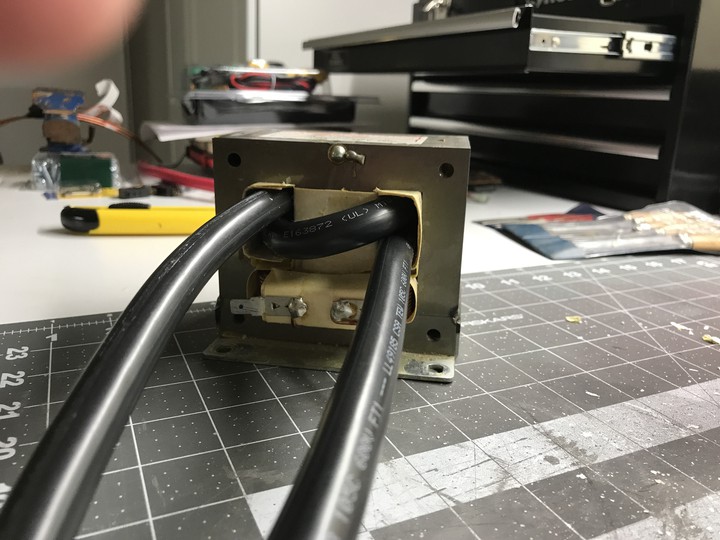
Building a Spot Welder for 18650 battery packs is an interesting and challenging adventure. How to over-engineer a spot welder.
 Timo Birnschein
Timo BirnscheinBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Timescale
Timescale
 Brad Arnett
Brad Arnett
 jeff.ballard.86
jeff.ballard.86
great project, don’t suppose you have a bom laying around?