 Brian Brocken
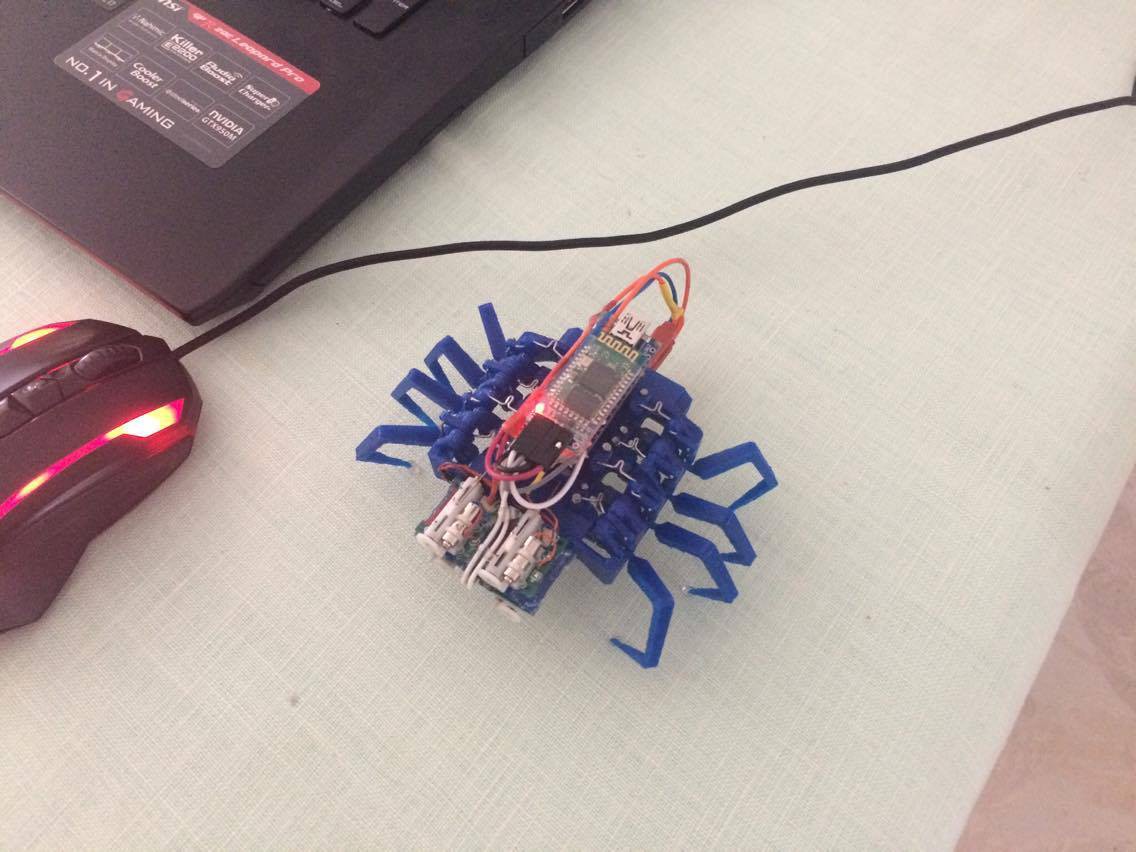
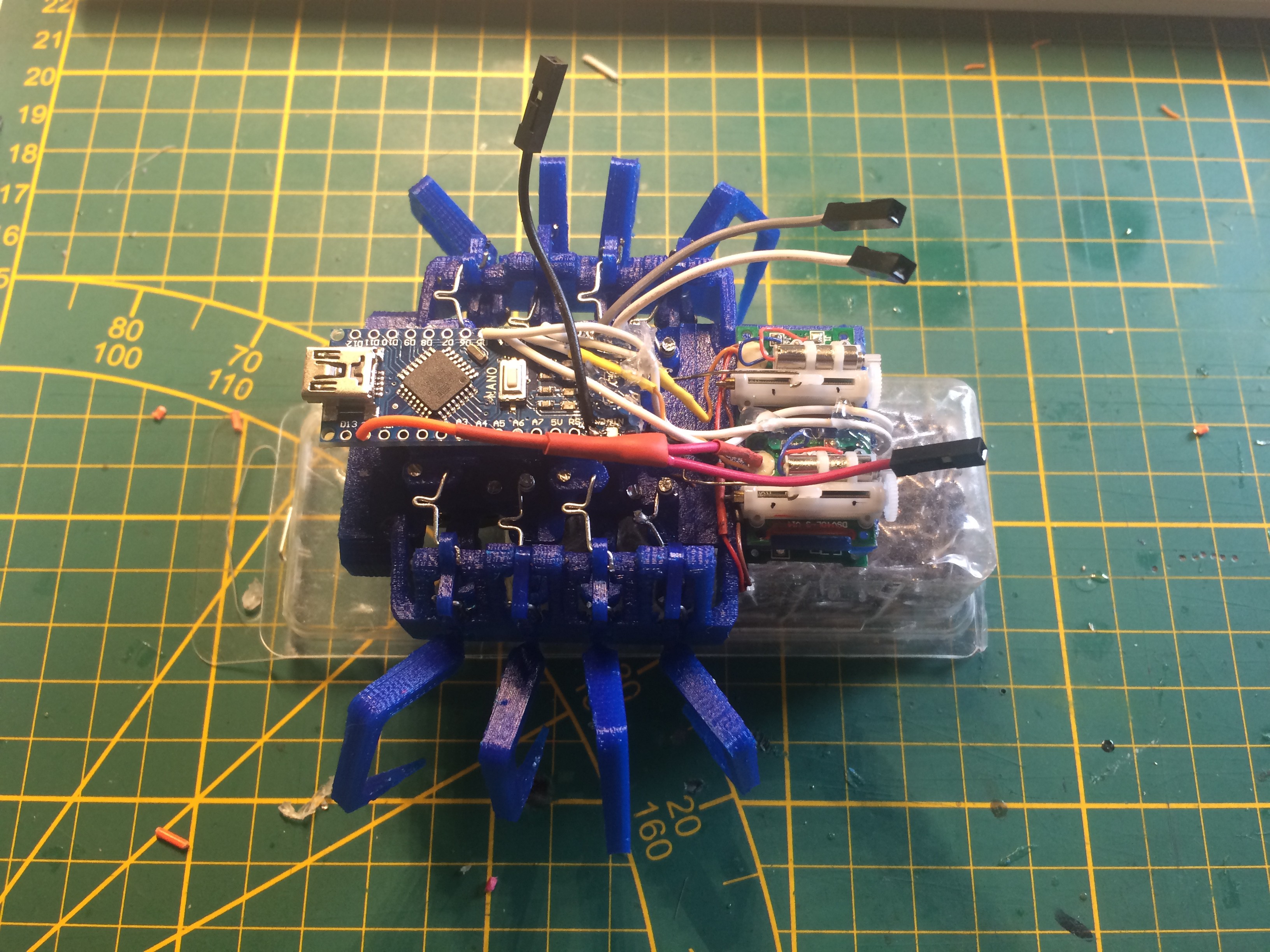
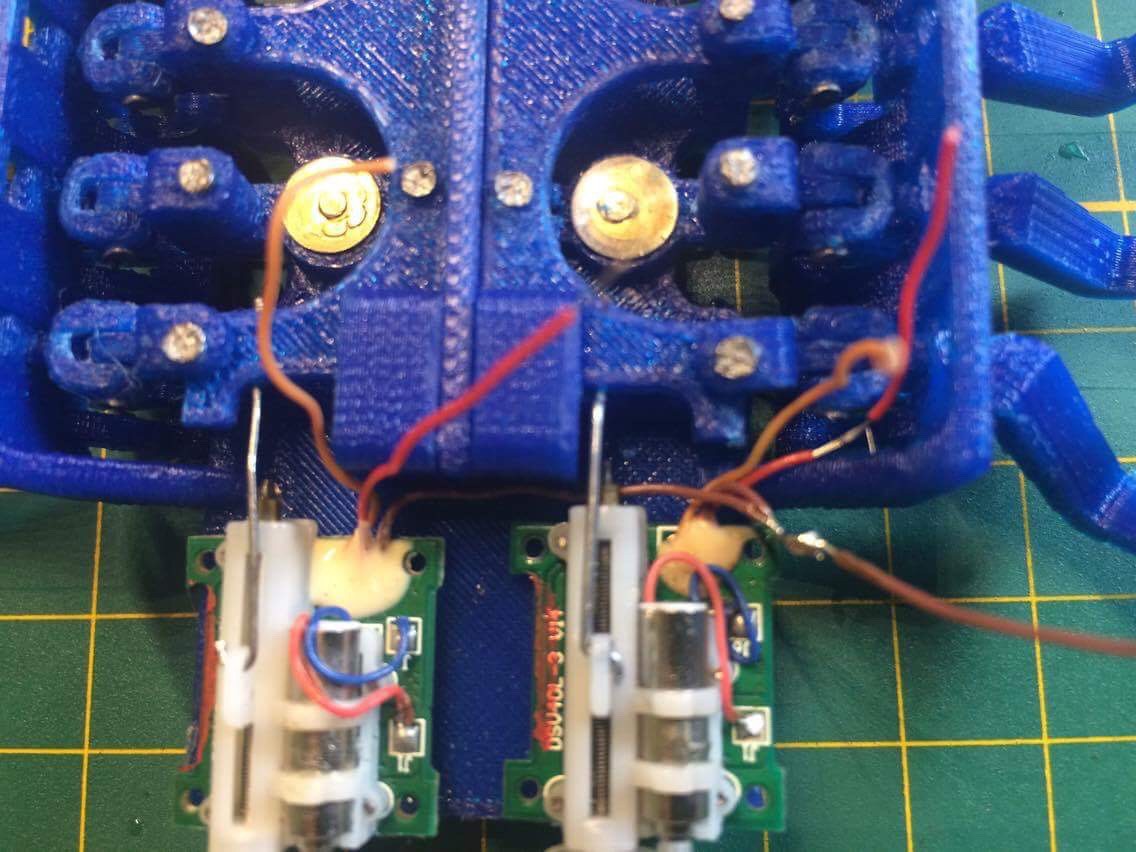
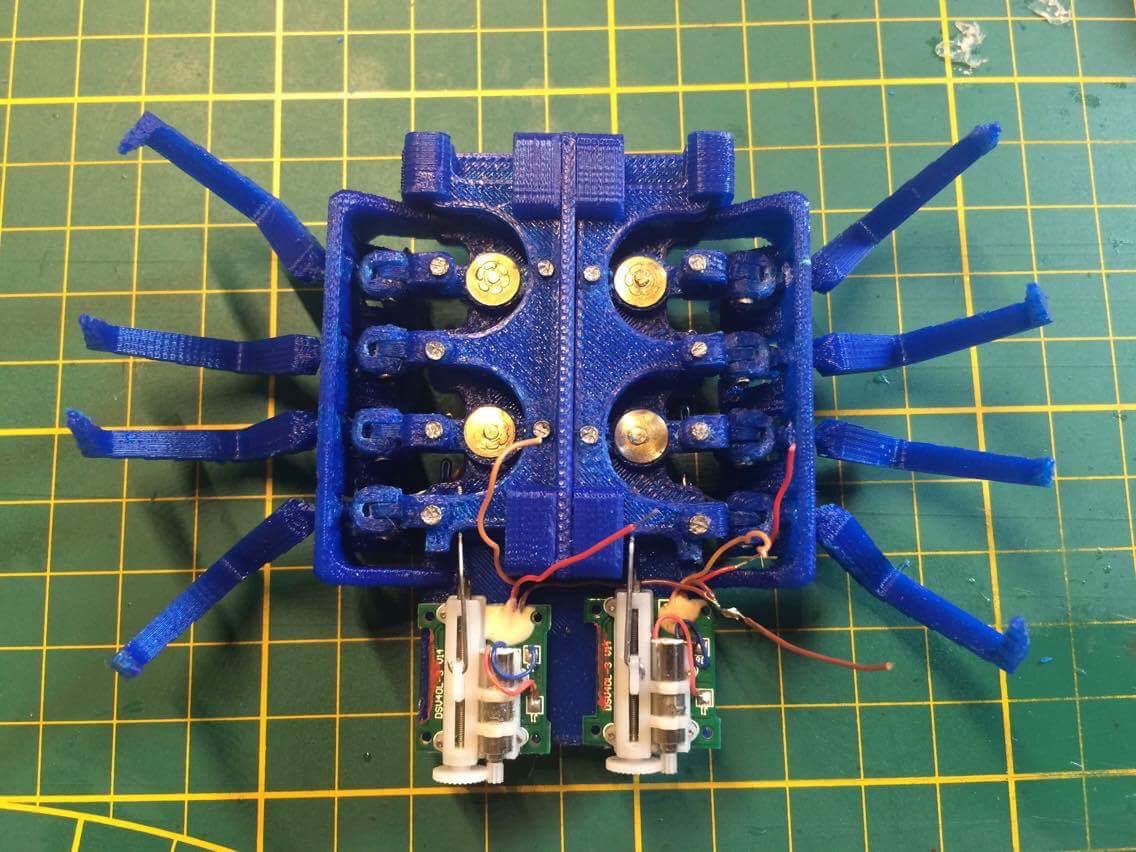
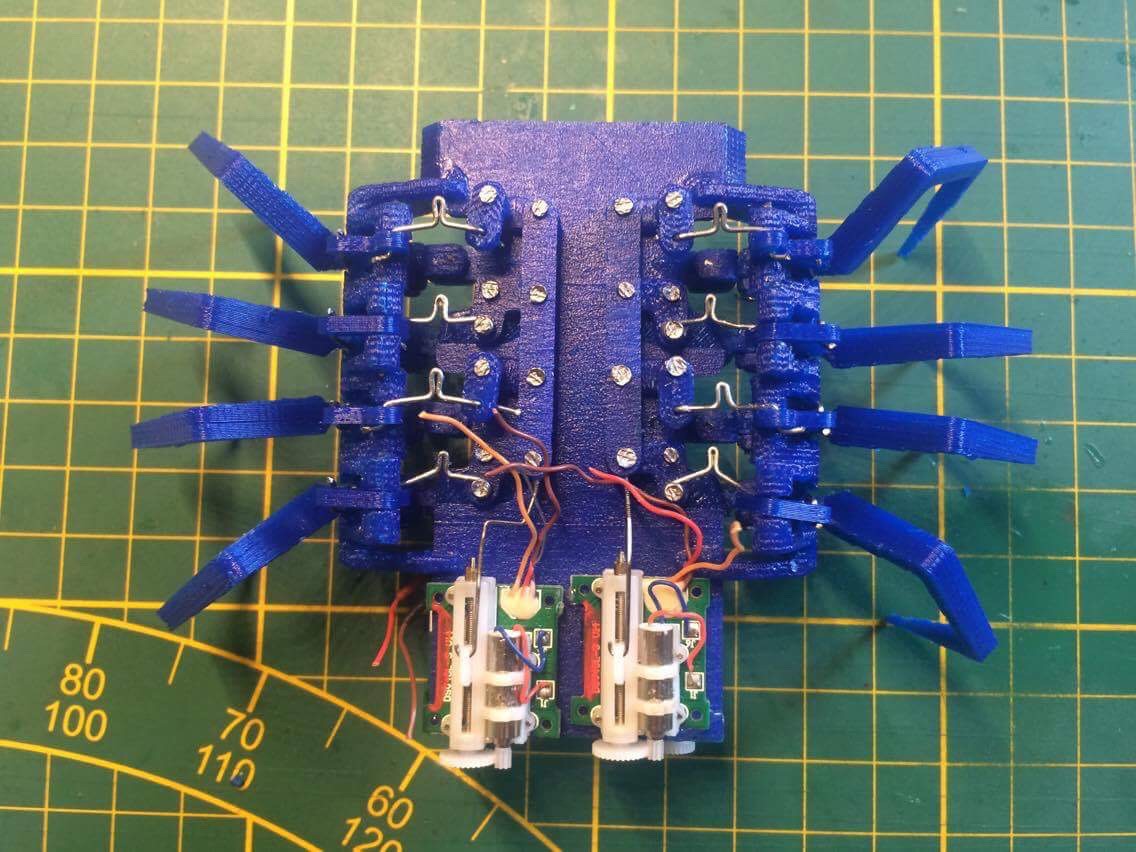
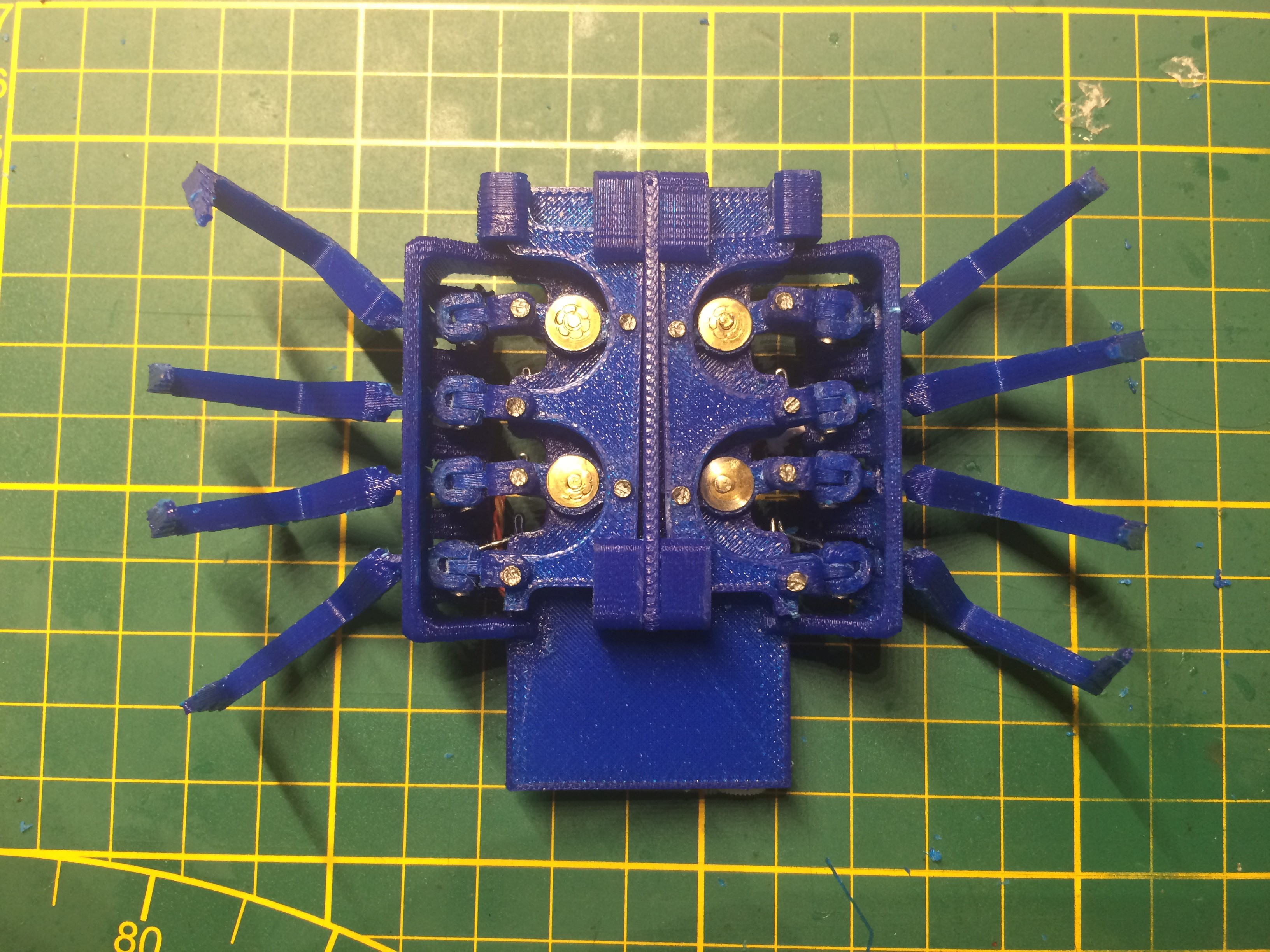
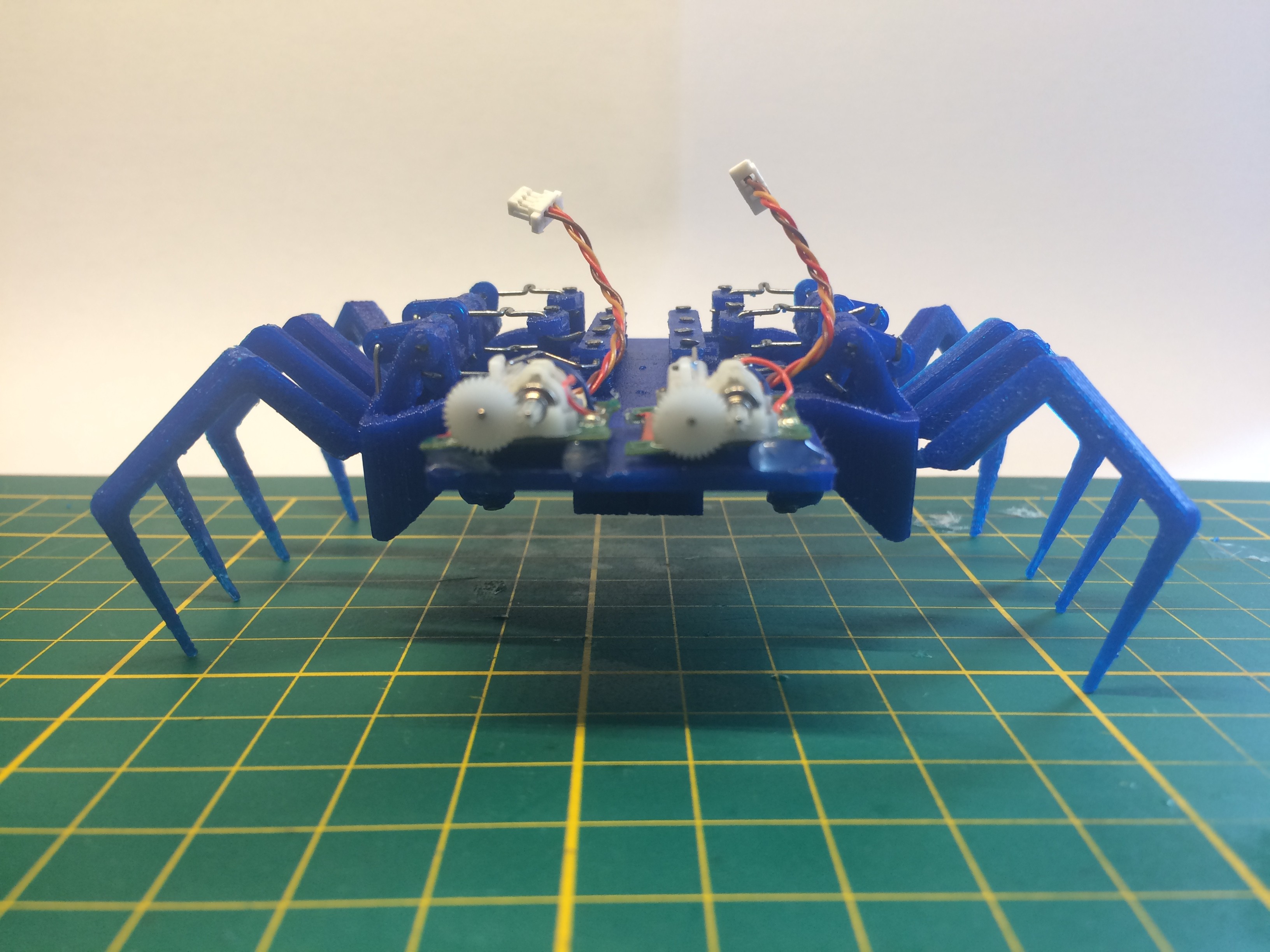
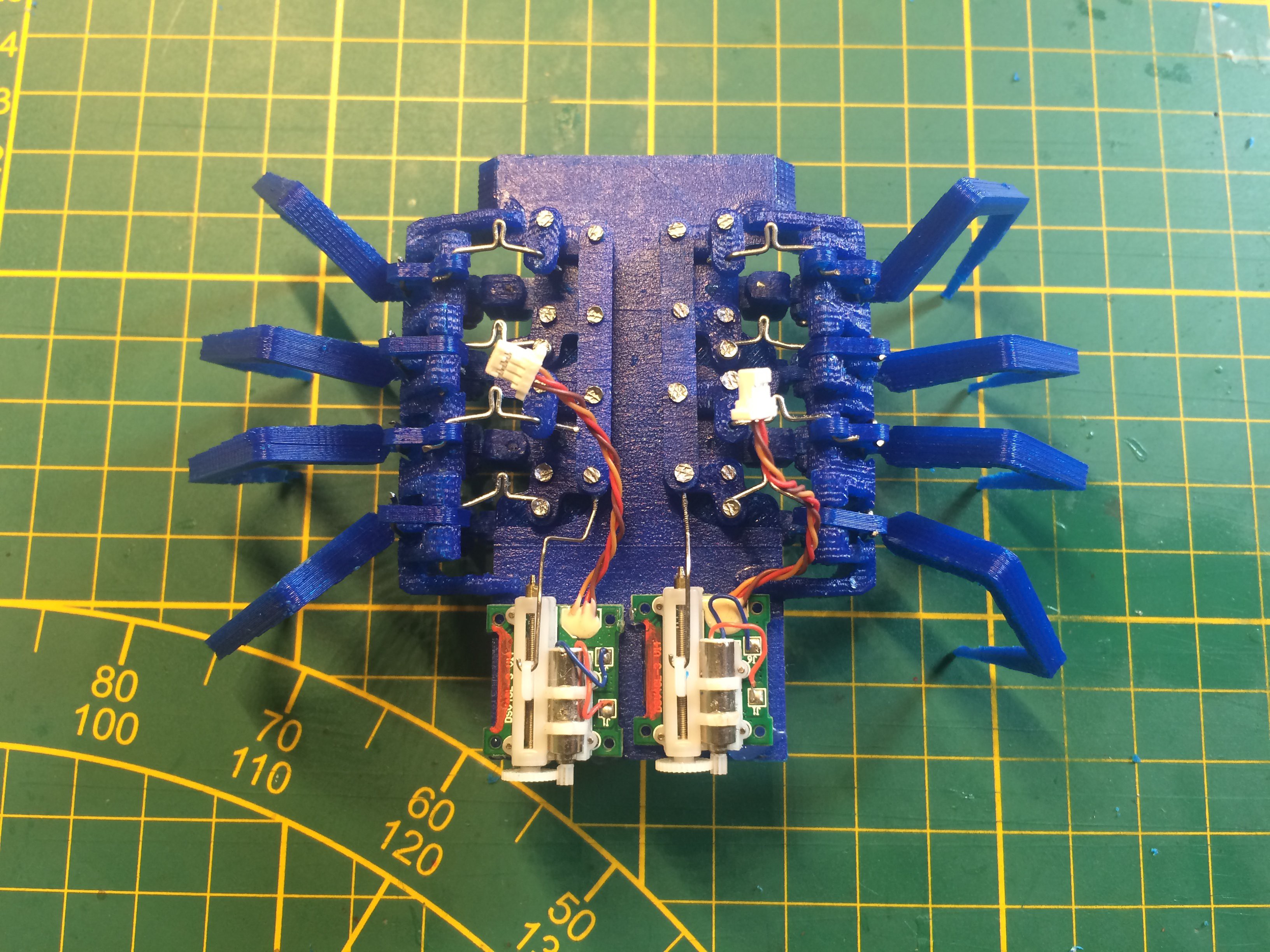
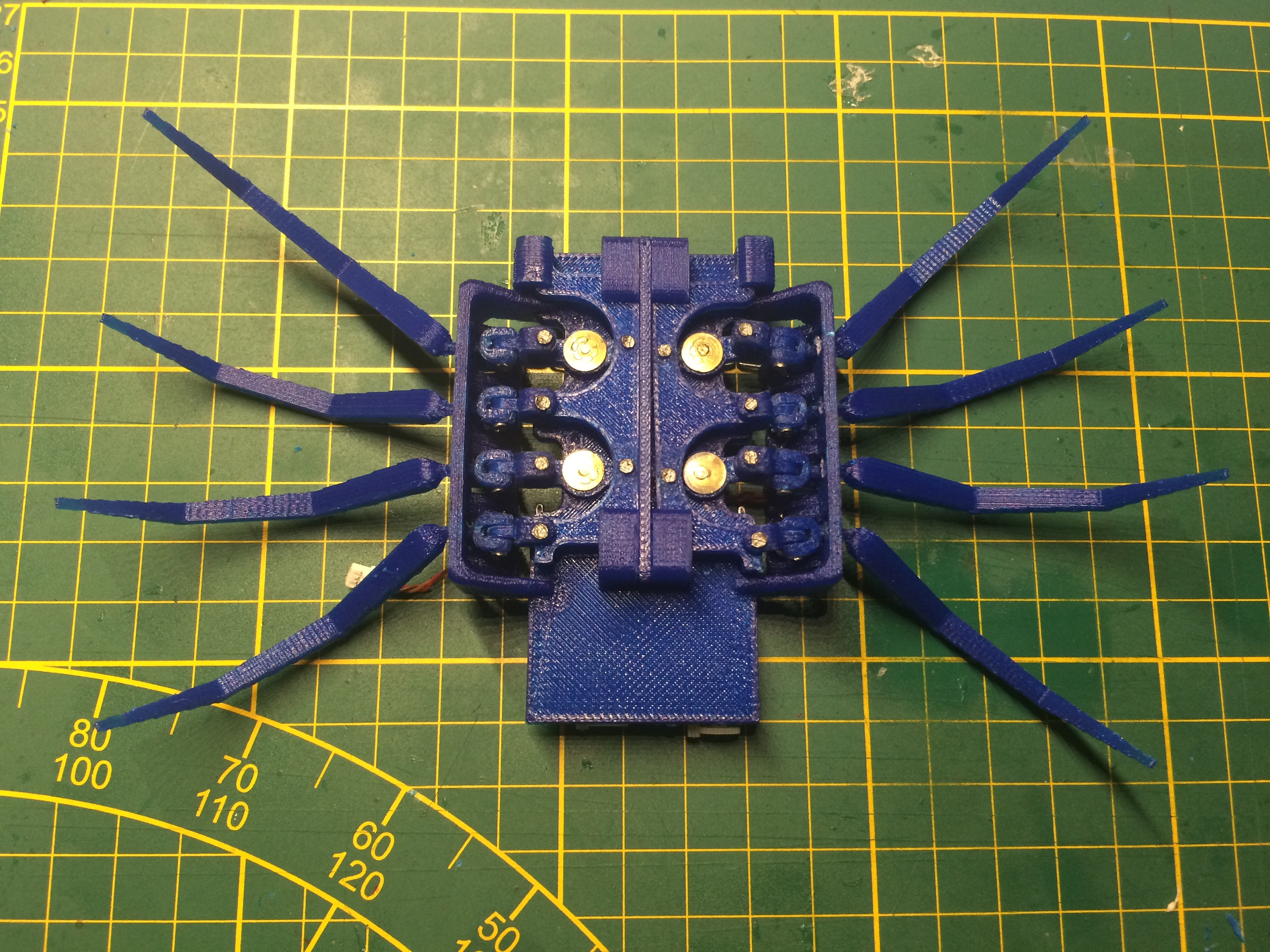
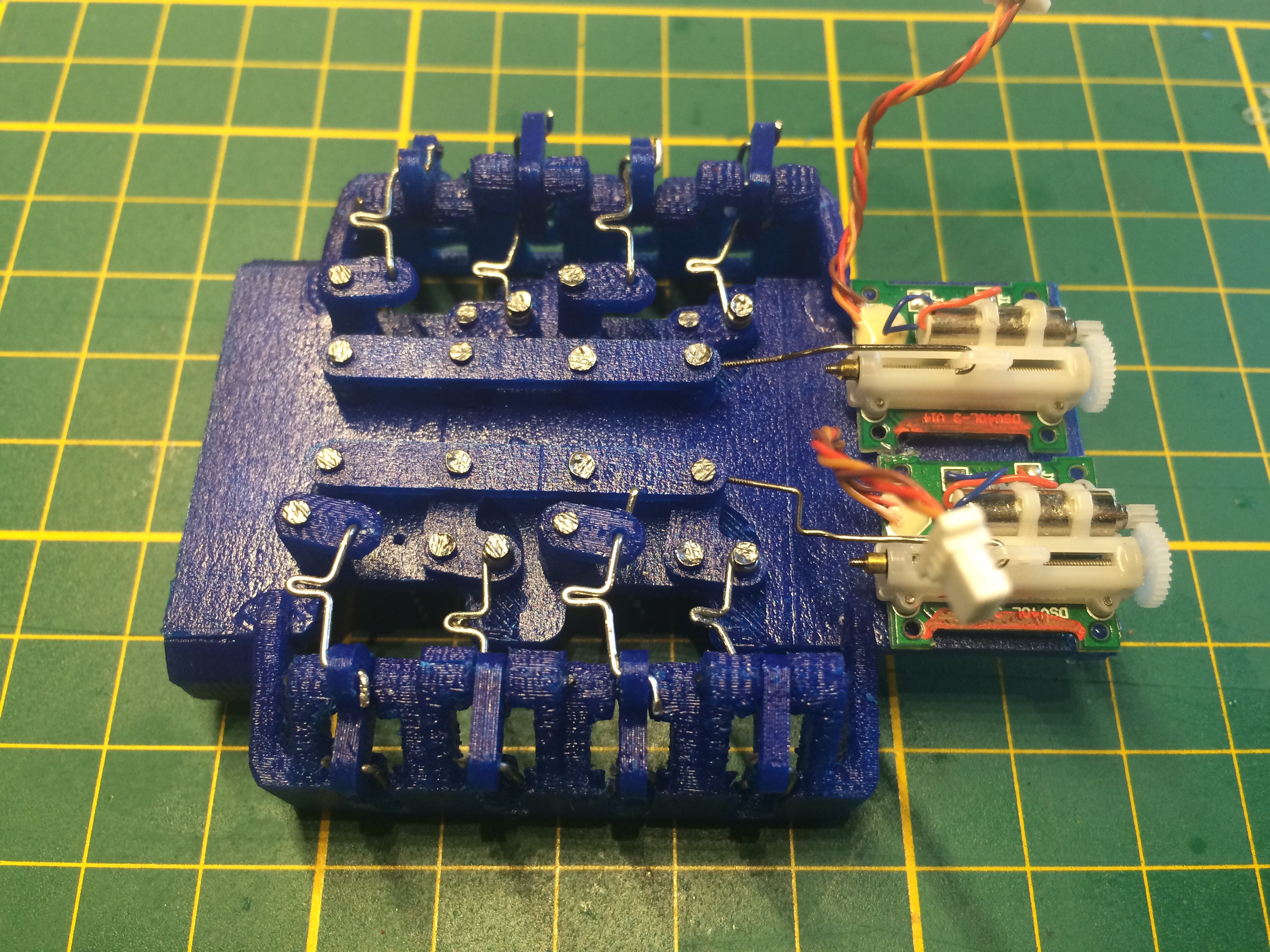
Brian BrockenThis spider like robot uses only 4 micro servo's salvaged from old and broken indoor rc-planes and helicopters. these servo's are controlled by an arduino nano and powered by two 1 cell 200mAh lipo battery's. So I eventually made a 2 cell lipo instead of my original idee of using a single cell lipo battery. So now I have 2 voltages: 7.4 volts wich goes to the Vin pin on the arduino nano and 3.7 Volts wich goes directly to the servo's and the bluetooth module. To control the movements of the robot I use a Geekcreit HC-06 Wireless Bluetooth Transceiver connected to an android device. All parts are designed by me and printed with my 3D-printer in PLA plastic. I have uploaded all the part files in the files section on this page and also on thingiverse. And I also added a complete version of the robot in the download link so you can see how it works.
STL and Fusion 360 source files can be found here : https://bbprojects.technology/collections/stl-fusion-360-source-files/products/8-legged-spider-robot-files
video:





 deʃhipu
deʃhipu
 theotherlonestar
theotherlonestar
 jimrd
jimrd
 shamylmansoor
shamylmansoor
Nice project. That orange cable makes it look more like a scorpion, though.