ken.do
ken.do-
What are the main differences between this and other VTOL?
03/16/2018 at 16:26 • 0 commentsOther VTOL + Forward Flight projects have been successful, but have usually required external vertical thrusters in the form of multicopter framing and motivation. This method requires a lot of battery power that the craft must carry with it for the entire flight. An external framing system for the multicopter motivation leads to unnecessary and in some cases, extreme drag, reducing forward flight efficiency by 25% or more.
![]()
![]()
![]()
![]()
The Bird of Prey II incorporates the vertical thrusting gear into the wing airframe in an aerodynamically sound way that can also be used for thrust vectoring using the louvred flap covers. It also makes use of battery alternatives to achieve maximum flight time.
Some other VTOL projects use a 'plank' style glider as the base. This works well, but results in a really crazy wingspan. The blended wing design gives maximum lift and minimum wingspan for easier ground transport.
-
Combination fuel-cell/battery power system
03/13/2018 at 18:11 • 0 commentsFor vertical take-off and landing, a large amount of available power is needed. Lithium Polymer battery provides this power. Leveraging power and weight, the LiPo battery only need to be sufficient for the take-off or landing operation, not both.
The hydrogen fuel cell will produce more than enough power for forward flight. Fuel cells are now available in lower wattages than when this project was started, which means a lower total weight and less hydrogen required to power it. The cell stack will be primarily running the forward flight pusher prop, flight control system servos, marker lights, but also any accessory systems or devices that can handle some variance in power supply.
Excess power produced by the H1 unit will be used to recharge the LiPo battery pair. Two batteries will be used with a switching system so that one can charge while the other is providing stable power to the flight control board and other systems that cannot handle any variance in power supply. Both can be tapped in series when powering the vertical ascent and landing, providing a larger current for powering all 3 propsets.
The proposed power plant will consist of a 250W or 500W H1 fuel cell stack from Aerostak, H1 storage tank, and two small 8s (1500Mah - 2500Mah) LiPo batteries.
-
Hot-wire Foam cutter
01/19/2018 at 05:31 • 0 commentsNiChrome wire arrived the other day.
I am using 32 gauge Nichrome 60 (10 ohm/ft)
The plan is to use this wire as a hot wire foam cutter wire to cut the wings and possibly rough out the body of the fusilage.
To power the wire, I have a DC motor speed and direction controller which I connected to opposite ends of the wire.
I stashed this motor controller that can deliver up to 24V inside of a variable speed electric nail file body (don't ask) an attached a super cheap voltage monitor with display so i could see what i was cooking with. Silicone coated wires came forth carrying voltage and were terminated with alligator clips to attach to the nichrome wire.
Pictures will follow eventually...
-
Construction
01/06/2018 at 05:41 • 0 commentsthe first prototypes will be electric powered as hydrogen fuel cell systems require a certain scale to be an efficient power source. Hot wire formed foam with carbon fibre reinforcement and 3d printed structural components where needed is a good place to start.
The foam prototype airframe will be built in four main pieces;
Wings x 2
Fuselage bottom
Fuselage top
Laser or scroll saw-cut wood airfoil profiles will be created for wing tip and wing root. A hotwire cutter will be used to cut a rigid foam slab into the desired airfoil shape by following the wood profiles.
Fuselage bottom and top will be shaped via MPCNC, leaving interior cavity for electronics and power source.
At least one carbon fibre spar will act as both a strengthening reinforcement for the wing and a mount point for vertical thrusting propsets through the through-port that is through the wing. Another spar may be added toward the trailing edge.
-
Design Concepts
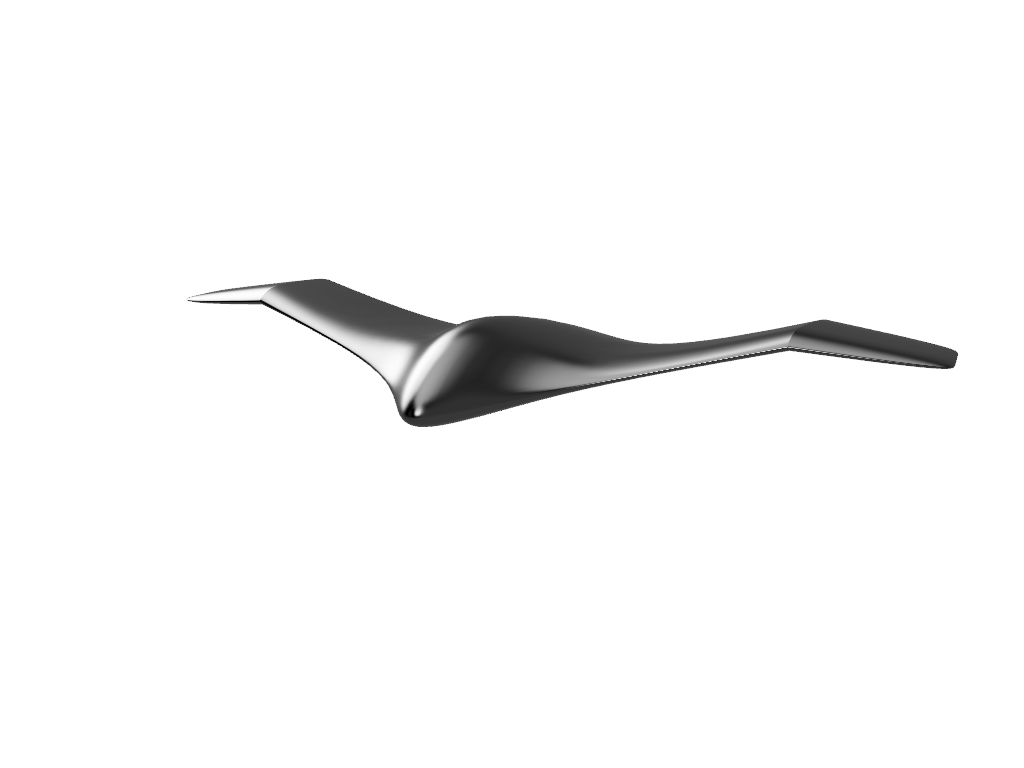
12/24/2017 at 04:59 • 0 commentsI have been toying with the idea of changing up the flat flying wing style.
![]()
![]()
The 'gull wing' style appeals to me because of the obvious bird-mimicry and the dihedral/anhedral combination of wing angle and what that might mean to craft stability.
-
Hydrogen Fuel Cell Power
12/21/2017 at 10:36 • 0 commentsCurrently working with MMC on developing a hydrogen fuel cell system optimized for this flight platform. Estimate for flight duration is 6 to 8 hours of continuous operation using their proven H1 hydrogen fuel cell technology.
The tank technology used to carry hydrogen fuel incorporates composites to attain high impact resistance and light weight.
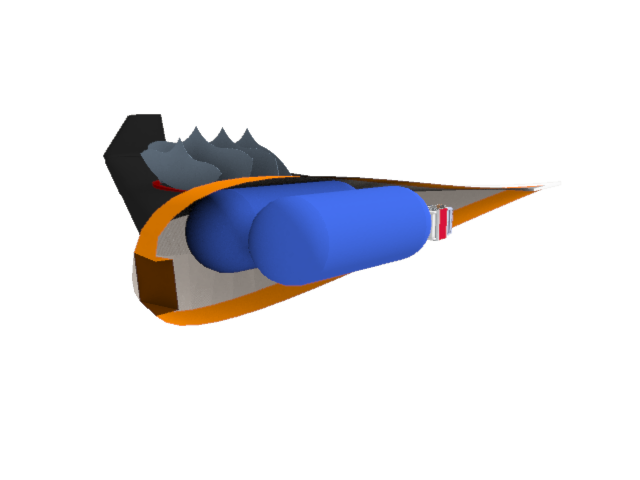
![]() This cutaway representation shows a possible location and configuration for tanks and fuel cell. The fuel cell is behind the blue tanks. Please see MMC's website for specific capacity and other details.
This cutaway representation shows a possible location and configuration for tanks and fuel cell. The fuel cell is behind the blue tanks. Please see MMC's website for specific capacity and other details. Combined with a LiPo battery powerpack, this system is excellent for long range.
-
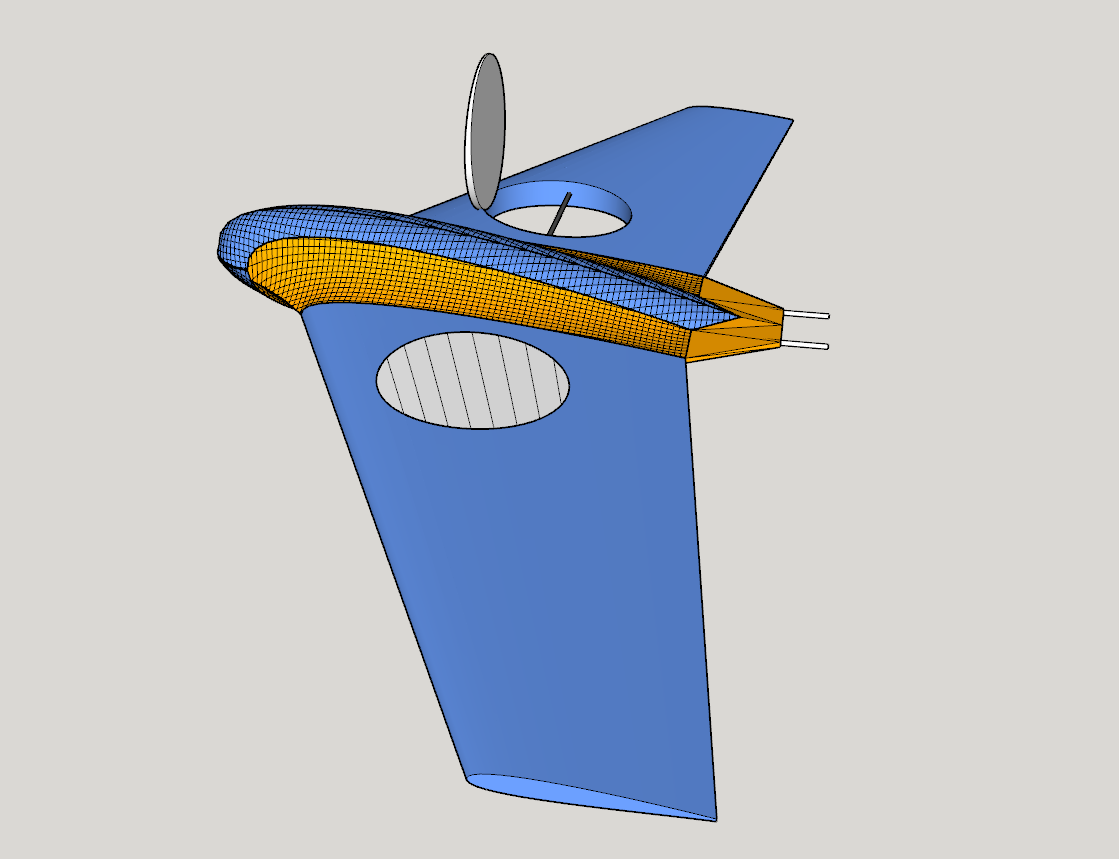
Louvred Port Covers
12/21/2017 at 10:33 • 0 comments![]()
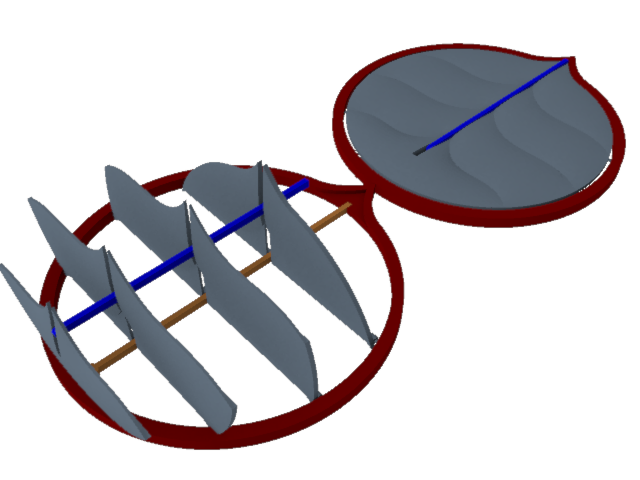
Louvred port detail
The root of each louvre section as well as the central fixed spar are attached to the hard plastic porthole sleeve that passes through and reinforces the porthole where the vertical thrusting axial pair are mounted. A moving spar is actuated by a servo to open and close the louvre.
Port covers on the top of the UAV wing are open or closed.
Port covers on the bottom of the wing are controlled using the pitch and yaw signals while in VTOL mode, and are closed in forward flight mode. The pitch control in VTOL mode will help accelerate the UAV to the necessary forward flight speed, while maintaining adequate lift and yaw manuevering through vertical thrust vectoring.
-
Transition from Vertical Take Off to Forward Flight
12/21/2017 at 10:32 • 0 commentsTo transition from VTO to FF, a few things need to happen:
1. Forward motion must be initiated.
2. Rear pusher prop must transition from thrusting downwards, ~90 to rear pusher position.
3. Vertical thruster coaxial pairs must shut down.
4. Port covers must close.
Ideas for transition:
Once altitude suitable for transition is reached, use servos to set the bottom port covers to an angle that would deflect the thrust of the vertical thruster rearward, gradually increasing angle until closed. At the same time, gradually increase the angle of deflection of the rear pusher unit until proper airfoil lift is achieved. During this transitory phase, the ailerons would be in max up position, gradually descending until stable forward flight is achieved.
All this can be done either manually or programmed directly into the flight controller, or an ancillary device (onboard or at base station). (Yawing while in VTOL mode can be accomplished by changing the deflective angle of the port covers as well)
![]()
![]()
![]()
Louvred port detail
Another completely seperate idea for this transition is the stop-and-drop method, where once a suitable altitude is reached, vertical thrusting units stop and rear pusher unit pivots to rear-thrust postion. The vehicle drops, nose first, rear thrust pushes it to nominal forward flight speed. Vehicle then levels out for forward flight via ailerons.
-
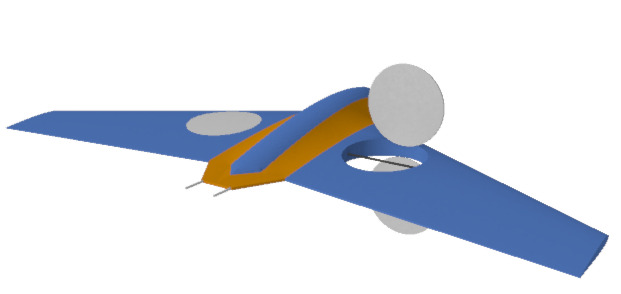
Airframe design changes
12/21/2017 at 10:29 • 0 commentsCreated a 3-D printable port liner that will eventually host mount points for coaxial lifting pairs and port covers. Put on fins. Broadened fuselage.
![]()
-
Motivational Apparatus
12/21/2017 at 10:25 • 0 commentsThe 'Bird of Prey II' designation is to differentiate this project from the 'Bird of Prey' project.
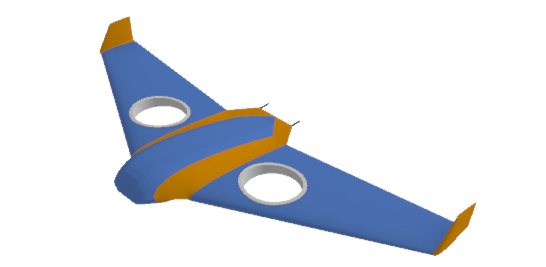
The difference is the idea to make the VTOL component more like a bi-copter, using two coaxial pairs of drive units. These components will be in two ports. A third single drive unit will be mount rear and center. This unit will have the tilt component and be located just off the extreme back end of the airframe.
On vertical liftoff, the bicopter pair will provide the bulk of lifting thrust while the lone unit at the back will be pointed vertically groundward and provide only levelling stability.
At a predetermined altitude, the lone unit tilts in steps to provide pushing thrust until forward flight is established. At this point, the lifting coaxial pairs disengage. The ports through the airframe would then be covered, either with a sliding door, a hinged door attached fore-ward, or a louvred cover approach.
Control of forward flight will be maintained through a combined aileron/flap actuated by servos.
![]()
![]()
'Bird of Prey II' Super Long Range VTOL UAV
Flight time and versatility will be vastly extended using a combination of multirotor, blended wing, and hydrogen fuel cell technologies.