 Kevin Harrington
Kevin HarringtonEasy to Use
Connect the DyIO with a USB cable and start playing with sensors, motors and other pieces in minutes You can start collecting data, moving servos and setting outputs without writing a single line of code. Coding with the DyIO couldn't be easier. Check out the 'No Programming' development application BowlerStudio. Once you're ready to begin programming, check out our programming tutorials to see some examples.
Bowler Studio
BowlerStudio is a robot development application that combines scripting and device management with powerful control and processing features.
BowlerStudio brings the full power of The OpenCV image processing library, a Configurable kinematics engine based on D-H parameters, A Fully Featured JCSG based Cad and 3d Modeling engine, and a Built in WebKit browser capable of viewing documentation and executing code directly from Github Gists.
Scripts can be loaded from the Local File System and edited using a editor of your choice or loaded from Github gists for a truly "backed up in the cloud" coding experience.
BowlerStudio features the Creature Creator, a design interface that lets users generate robots with slide bars. The application will generate 3d printable STL's that will walk just like the generated robot on the screen.
Cross PlatformWe've tested the DyIO on all major operating systems. This means that users are able to write code on Mac deploy to Linux and test in Windows without having to worry about different tool chains. Users are able to get up and running in as little as 8 minutes. Likewise, you can use almost any programming language or environment, currently implemented in Java, Python (Jython). Any other language can be added as well, from C to MatLab to Excel! Using the Neuron Robotics Development Kit, users already have a powerful library out-of-the-box with standard Java SE.
GitHub Gist Collaborative Robot Coding
We have developed a unique application with BowlerStudio. The application is basically a web browser with the ability to run scripts right out of GitHub Gist. You just browse to a Gist, or to a web page with an embedded gist, and hit run. It loads up the code and can run a robot, build CSG style CAD objects, and talk to lots of other hardware useful for building robots.
Dynamic Inputs & OutputsThe DyIO has 24 channels that can configure to be whatever mix of inputs and outputs is need at the time. The inputs can be set to asynchronous modes so that the DyIO will send alerts when there are changes versus having to poll inputs constantly.The outputs can use the USB line for power or can use the external battery connection for higher current applications (i.e. servos) Drive up to 24 servos simultaneously!
- 24x Digital Input – All channels
- 24x Digital Output – All channels
- 24x Servo Output – All channels
- 8x 10 bit Analog Input – Channels 8 – 15
- 4x PWM Output – Channels 4 – 7
- 4x DC motor controller signals – Channels 4 – 7, with direction flags
- 1x Asynchronous Serial (UART) In & Output – Channels 16 & 17
- 1x Synchronous Serial (SPI) In & Output – Channels 0,1, & 2
- 4x Counter/Encoder (Tick, Direction & Home) Inputs
- 4x Stepper Controller (A, B & Home toggle) Outputs
- R/C PPM signal reader on Channel 23
- 8x Real-Time, dynamically configurable controllers (PID)
The DyIO features a cutting edge PID control system. This system lets you link any input to any output with the DyIO managing real-time control. Each PID group allows one input (counter or analog input) to be linked to one output (DC motor or Servo) in a real-time closed loop controller.
Open CommunicationsControlled via the Bowler Communications System. Interoperates with any BCS complaint system! Addressed via IEEE standard MAC address. Built-in USB is a universal serial port. No drivers needed on most systems. USB connection allows users to directly plug-in the DyIO to their computer or they can use the Bowler Expansion Port to use other communication types (i.e. the bluetooth wireless module) The Bowler Expansion Port allows the device...
Read more »
 Mateo Estigarribia
Mateo Estigarribia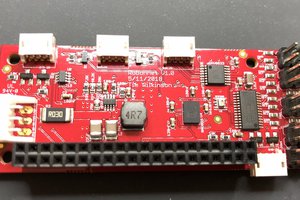
 Tim Wilkinson
Tim Wilkinson
 Cees Meijer
Cees Meijer
 Redtree Robotics
Redtree Robotics