 Redtree Robotics
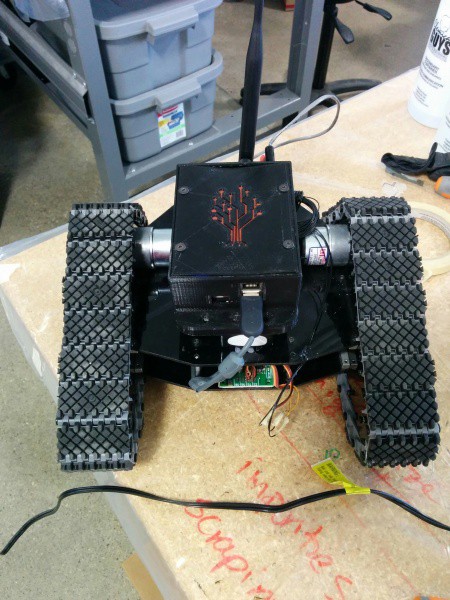
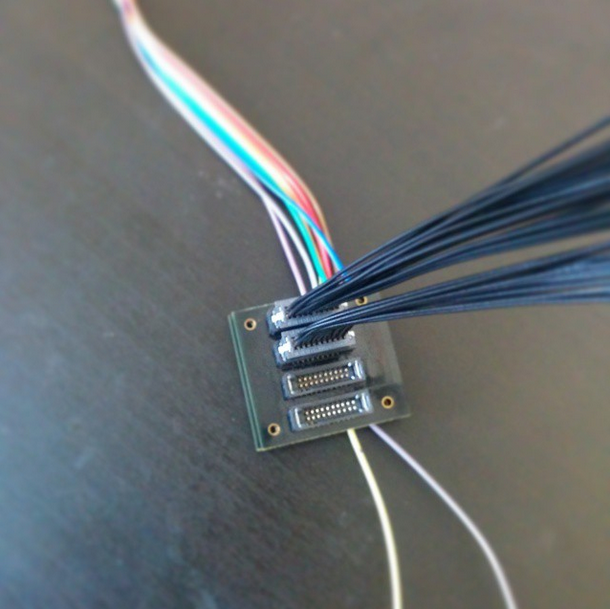
Redtree RoboticsThe Redtree Hydra is designed for connectivity. We have made it easy to attach sensors, actuators and motors with our hardware so you no longer need to design complicated circuits.
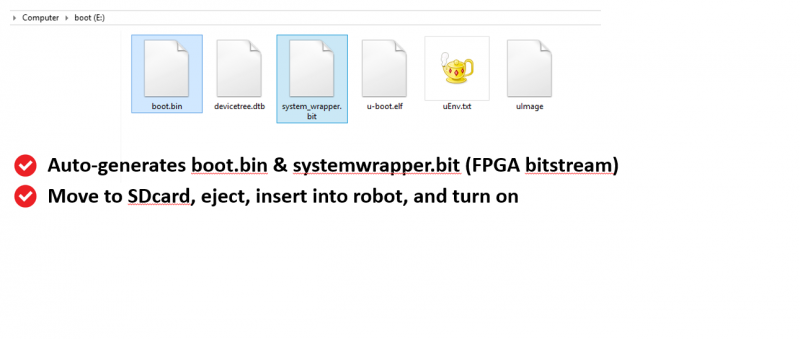
Our software tools help to auto-generate device drivers so that plugging in a component is almost as easy as plugging a mouse into a computer. This means you can get data from sensors into the computer so you can focus on writing programs and working with the data right away.
Hydra's seamless networking API makes it simple to share data with other robots or to the cloud where it can be used anywhere in the world. The Hydra middleware automatically sets up and managing your wireless connections so your robots are always connected.
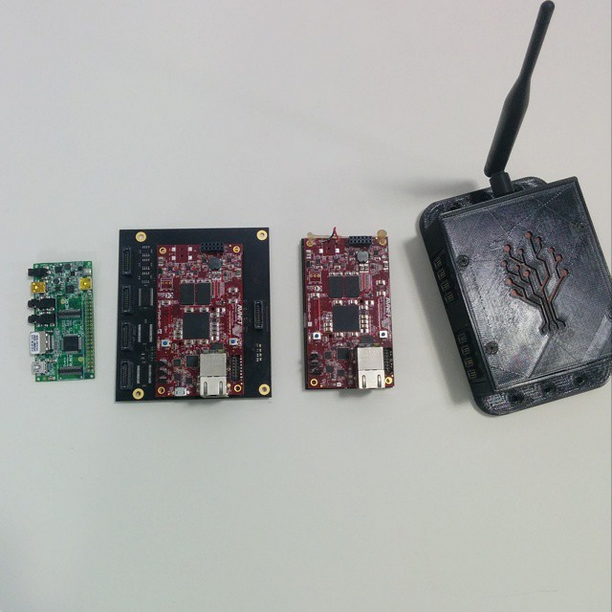
We use a cutting edge Zynq dual-core ARM-A9 processor with an FPGA. This is the ideal tradeoff between performance and energy efficiency.
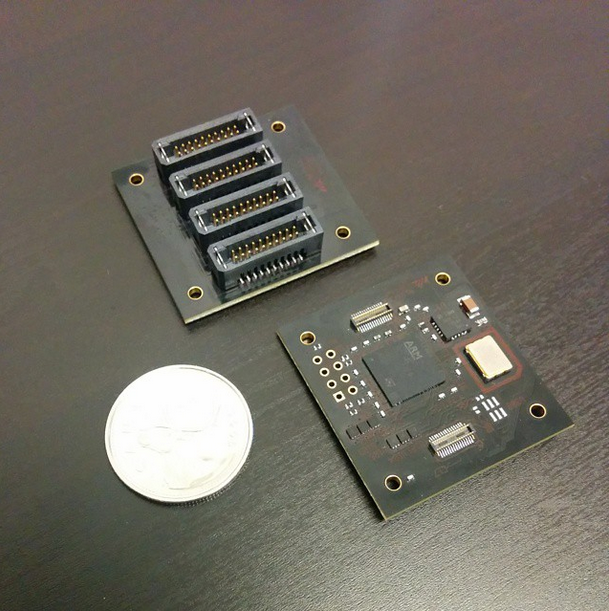
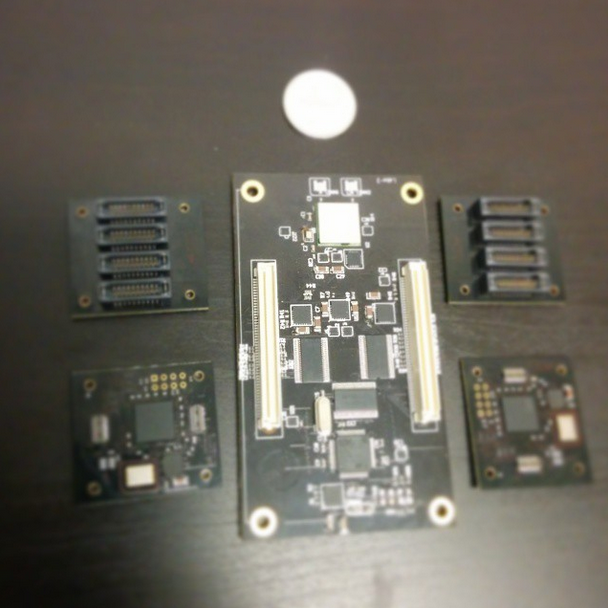
Sensors, motors, actuators and components can be added to our system with up to four modular I/O cards. You only pay for what you require.
Out of the box, we provide Wi-Fi and Bluetooth with the option to add Zigbee and 4G/LTE. Our seamless technology uses all of them together to always stay connected.
Our real-time linux kernel means data gets where it needs to be when it needs to be there.
We know engineers are used to their tools. We support everything from c/c++, ROS and OpenCV, to Matlab / Labview.
It's easy to share data with other robots, store it in the cloud and analyze it in real-time with Hydra.
Four I/O slots are provided, and can be populated with these cards:
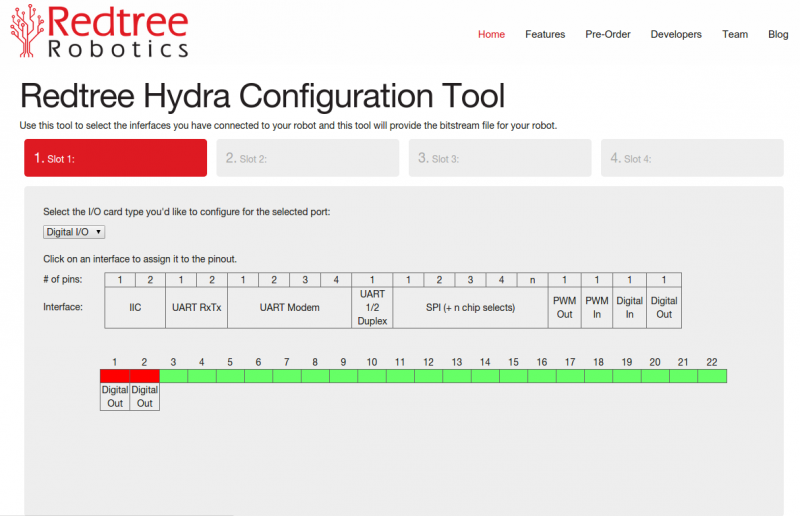
Reconfigurable I/O Card - Can support any set or combination of digital interfaces. A total of 20 lines at 5V are supplied and can be configured with our yet-to-be-released configuration tool. All you have to do is assign each line to an interface. Digital interfaces supported:
GPIO In/Out
PWM
Quadranture Encoders
Counters
UART (Full or Half Duplex and modem signals optional)
CAN
I2C/SMBus
SPI (2, 3, or 4 wire and as many chip selects as desired)
etc, the list goes on
For example, with 20 lines you can have 4x UARTs, 4x PWM, 1x I2C, and 6 GPIO, or maybe you want to have 10 I2C interfaces. The combinations are endless, and all accessible and in our Linux environment.
Analog I/O Card - 32 Analog input Channels of 0-5V at 16 bits and 1ksps per channel. Never run out of analog interfaces again. Can be configured to a lower number of channels for a higher data rate for audio applications.
Standard Interfaces - These always come with our system:
1x Gigabit Ethernet
4x USB 2.0 Highspeed Ports
Wireless Inteferfaces -
WiFi 802.11 b/g/n
Bluetooth EDR v4.0
ZigBee 900 MHz (Optional)
3G/4G/LTE (Optional)
GPS (Optional)
Our main board also comes with a 9 degrees of freedom IMU (gyro/accelerometer/magnetometer).
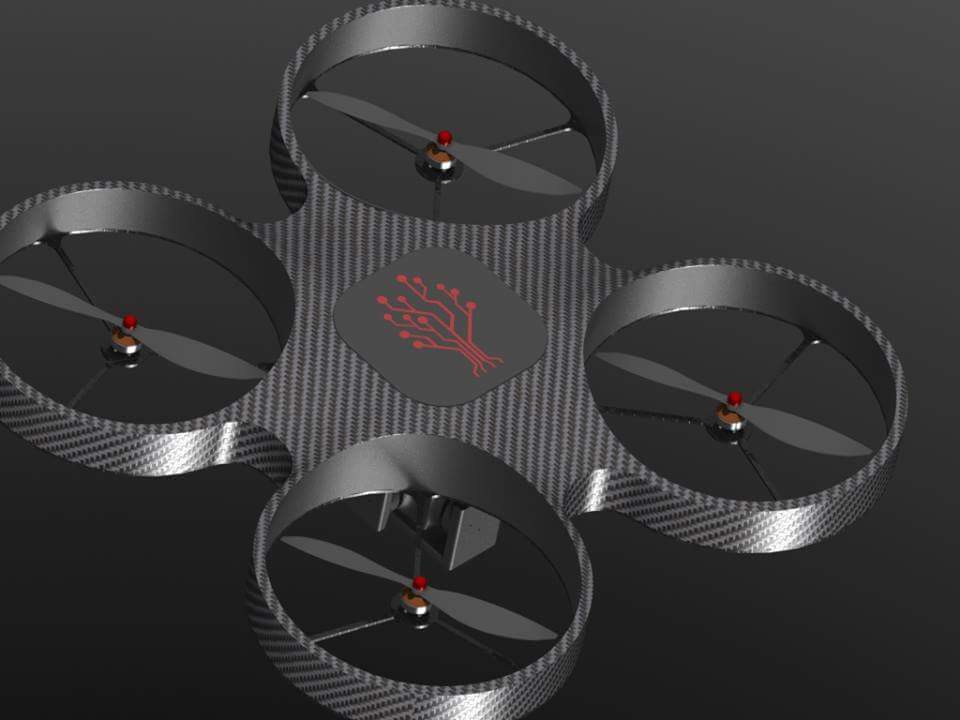
The target price of the Redtree Hydra + one I/O card will be between $200 and $300. We also plan to offer a drone kit, a rover kit (each around $700-1000) and drone / rover kit (around $1000-1400). We intend on crowd funding this project and will post links to the campaign when we launch in the fall of 2015.
In the long run, we want to miniaturize all of this further so that it can be integrated as a system-level component into your own designs while retaining all of the benefits of our technology so that scalable, affordable, easy to build robotics are possible.




















 Dimitar Tomov
Dimitar Tomov
 Andrei Gramakov
Andrei Gramakov
 Owen Trueblood
Owen Trueblood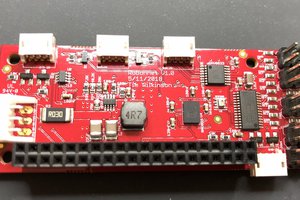
 Tim Wilkinson
Tim Wilkinson