 GarageHacker
GarageHackerRework will contain the following:
- Rock-crawler chassis w/ ESC (from RC car/truck)
- Updated roverOS
- Updated GROVER control application
- GPS location/logging to be added
- First attempt at autopilot
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Rework will contain the following:
- Rock-crawler chassis w/ ESC (from RC car/truck)
- Updated roverOS
- Updated GROVER control application
- GPS location/logging to be added
- First attempt at autopilot
Wow, time flies when we have to worry about other things other than our hack projects!
Stay tuned... I am in the design phase of the next two generations of the rover. Gen2 suffered from some chassis-based mechanical issues. The new chassis platform will arrive tomorrow, so the modding can begin.
Gen 3 - ArduinoMEGA and Arduino UNO working in master/slave mode
- Upgraded chassis based on R/C vehicle
- More completely coded than Gen2
Gen 4 - Potential items of interest
- Raspberry PI running the host OS, providing navigation, communication
- Network of arduinos controlling sensors and drive functionality
Working pretty hard this weekend assembling the items that I have for the new version of the ROVER... Stay tuned...
A new chassis photo has been added as promised. Here are the following steps that have been completed:
- Motors/Wheels built and mounted to chassis
- Chassis design finalized
- Manipulator arm installed
- Lexan mounting material installed so that platforms require less drilling and electronics can be removed
- Motor drivers installed
- Camera options finalized
- No more tether! The tether has been eliminated and current plans involve using Wifi for drive control (2.4GHz)
- Wireless video will be added to completely remove the need for tether
- Bump sensors removed
- Tracks removed / discarded for use on another project
- 4WD will be used instead of track drive
- Camera will no longer be mounted up high, but instead will be mounted on a pan/tilt unit up front
- 2nd CMOS camera removed
- DFRobot Arduino motor shield removed
- Individual DFRobot 1A motor controllers used for chassis drive
- Communications module of GROVER (control application) will be re-written from using RS-232 serial to TCP/IP
Wow! What a difference 36 hours makes! The chassis is still being constructed with some helpful mechanical and electrical re-designs taking place.
- The chassis has been mated with the motors.
- New ArduinoMEGA sensor board, standoffs, and battery holders have been ordered.
- RN-XV WiFly Module has been ordered.
- Robotic arm has been modified to remove the power source and directly mount the arm on the ROV chassis.
New chassis parts have arrived and are currently being assembled. Stay tuned for photos in the next update!


 boolean
boolean
 aeropic
aeropic
 RudyAramayo
RudyAramayo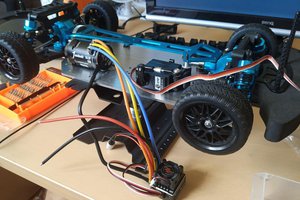
 Alexandr Kovalyonok
Alexandr Kovalyonok
Updated version of this project coming shortly!!