 Christoph
ChristophAfter the Teensy 3.0 took me to the world of ARMs I quickly wanted to try different chips. While the Teensy boards and tools are great, they are limited to a very specific set of Freescale chips.
ST sells ARM chips as well, so I got a nucleo board which can be used to program other targets as well. This breakout board has an SWD header, so it can be programmed through the nucleo's SWD header or by any other programmer with this interface.
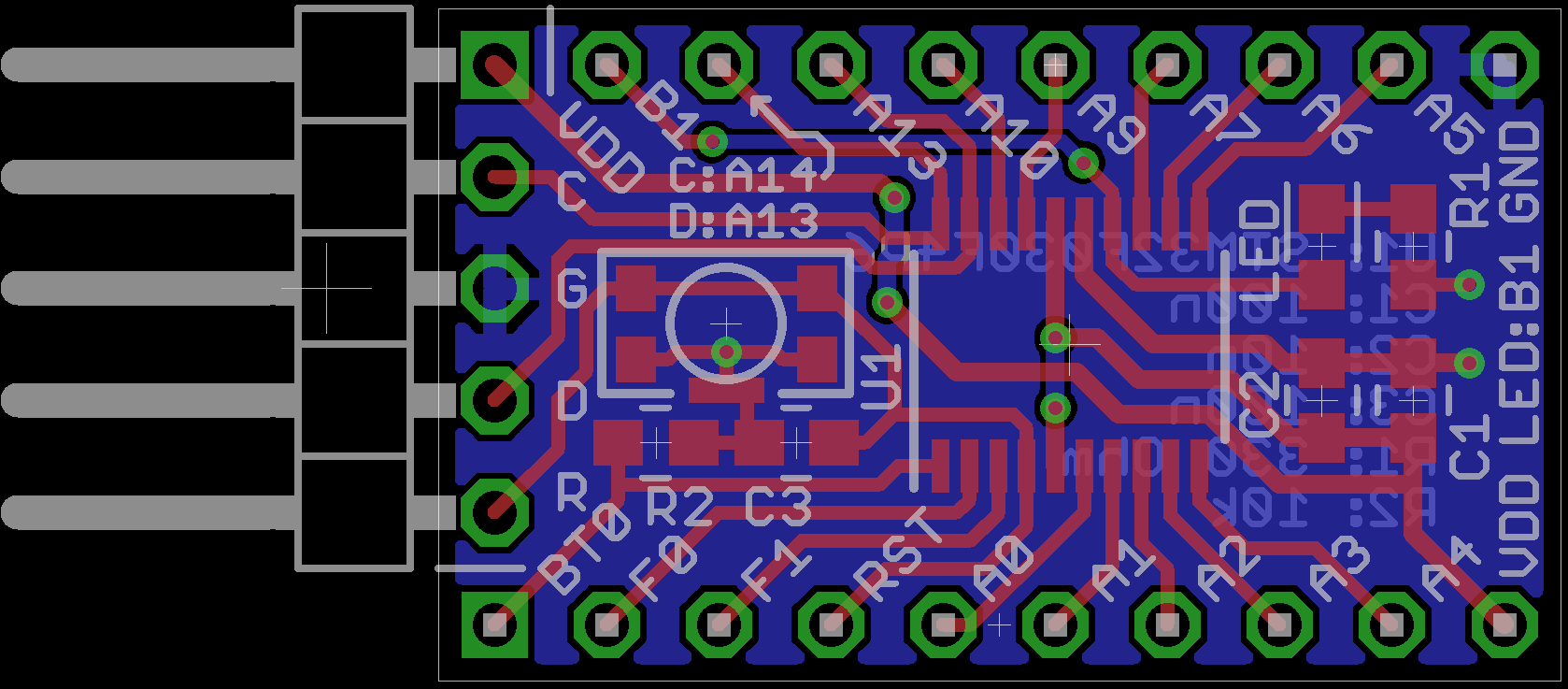
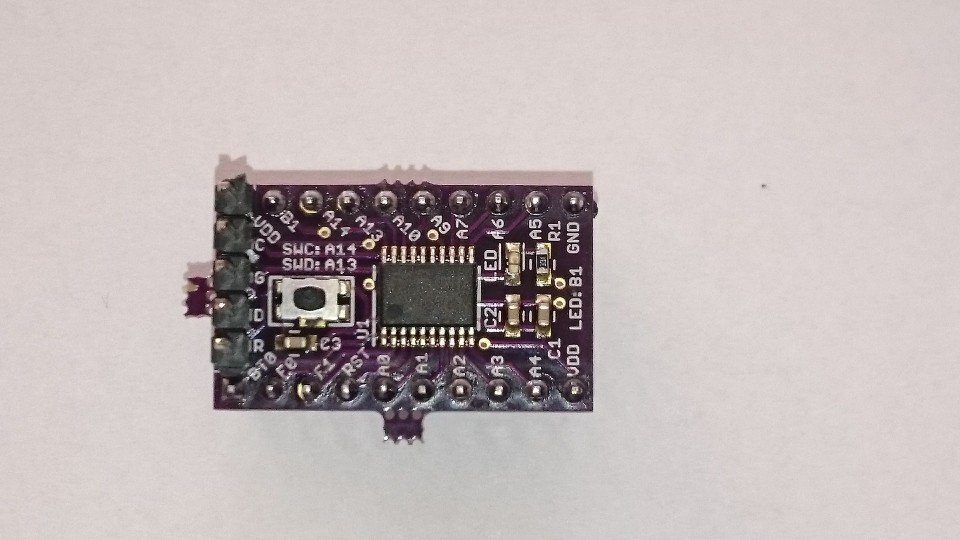
This board is dead simple:
- MCU
- decoupling caps
- an LED with a current limiting resistor for that first blinky program
- reset button
- SWD header
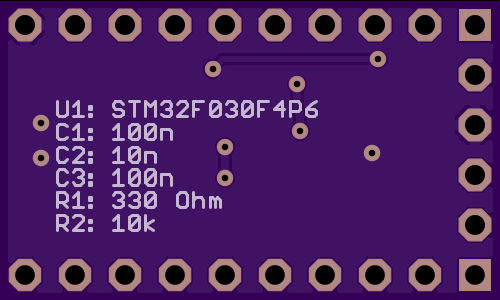
- BOM on the bottom side so you can simply throw it into your box of PCBs for soldering later, and forget where the docs are.
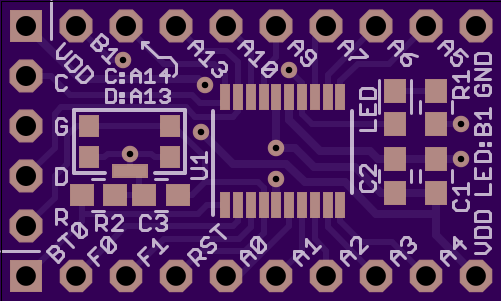
MCU and LED polarity:
- The MCU's pin 1 is marked with a longer silk screen line (towards the A0 pin)
- The LED's cathode is on the extended side of the silk screen lines (towards the A6 pin)






 Roman
Roman

 Jacques
Jacques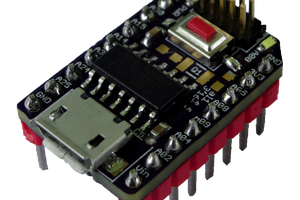
 Alex
Alex
Thank you! I was trying to figure out how to wire up SWD making my first ARM board using this same chip, and this project helped a lot!