Films4You
Films4YouPan and Tilt Camera steppers and Arduino
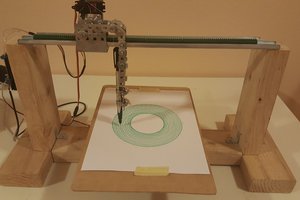
100 to 1 geared stepper and extra worm gears to increase torque and reduce speed.
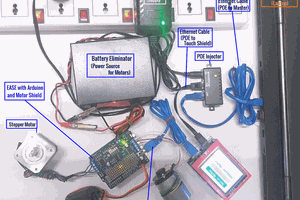
Using Arduino and Motor Shield V1.2 for control via a joystick
The steppers are from eBay :-
DC5V 2-phase 4-wire Gear stepper motor
Full Metal Gear Stepper Motor
Arduino Leonardo and
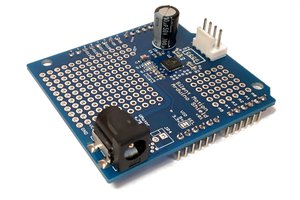
Adafruit Motor/Stepper/Servo Shield for Arduino kit - v1.2
These Motor Shield are discontinued but may still be available on eBay or the Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 could be used with suitable changes to the code
Files:
Arduino Code:- ( camera_pan_and_tilt_V2.ino )
https://1drv.ms/u/s!AjFFUc7muc09hDT28Wn3WXhD4fHf
USE AFMotor Modified folder with Leonardo by Michael MargolisNotes:
USE AFMotor Modified
( Modified for the Leonardo by Michael Margolis)
Control both Stepper motors at the same time with different speeds if needed
For use with v1 shields
100-1 metal gear stepper. With further Worm reduction
Tilt, Up and Down 100-1 metal gear stepper.
With further Worm reduction and to increase Torque
Using Maplin Worm Gear, a bit bigger diameter than the one off eBay
But using the same bigger gear wheel off eBay
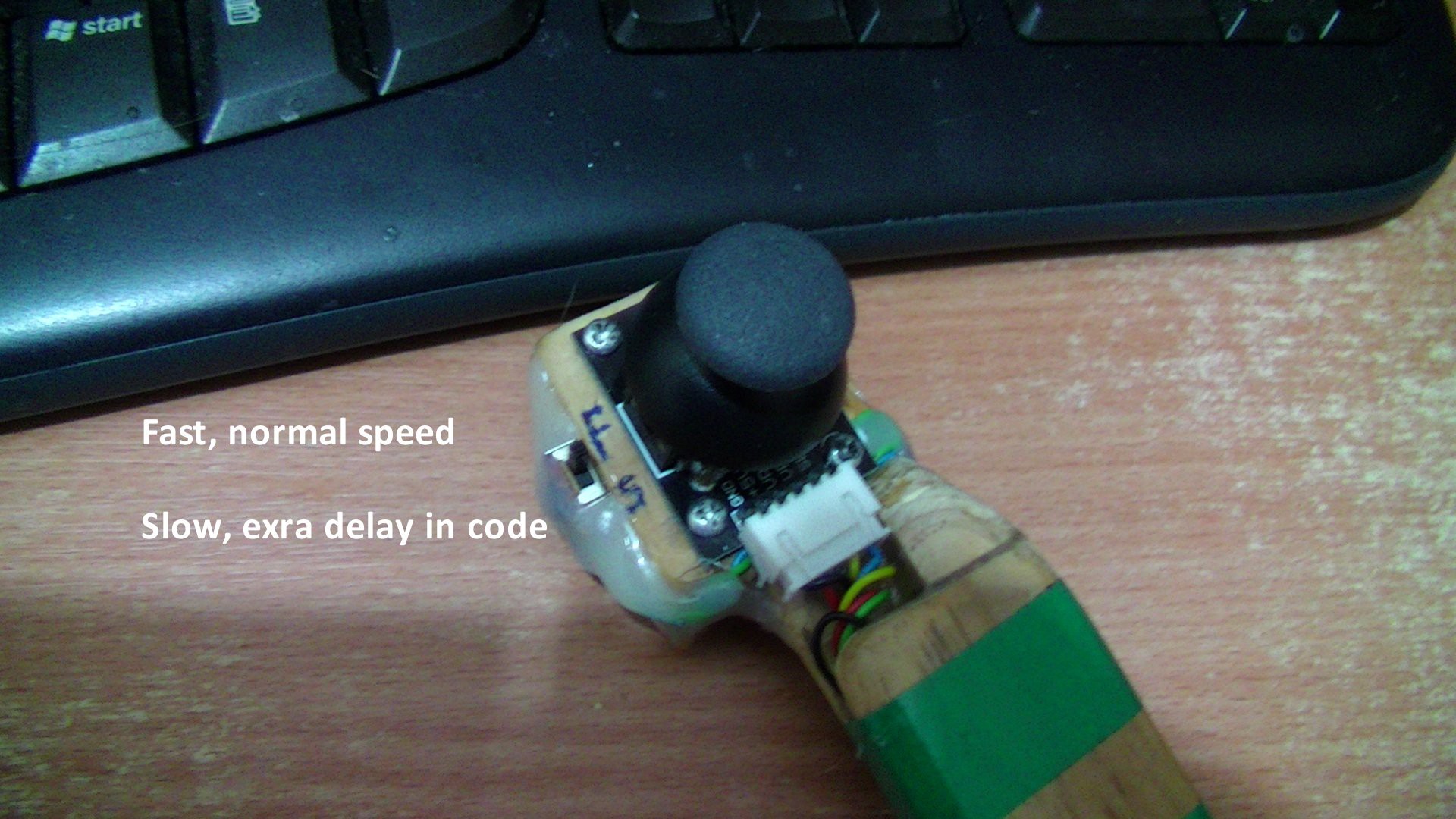
Using Analogue Joystick for control, with the Joystick button used to slow down movement using a delay.
Step Angle: 18 ° / 100 so after geared moves 0.18 ° per step
20 Steps per 360°
Reduction ratio: 100:1
2000 steps on output shaft after the 100:1 reduction
Actual motor Step Angle: 18 ° / 100 = 20 Steps per 360°
Public domain!
SINGLE - One coil is energized at a time.
DOUBLE - Two coils are energized at a time for more torque.
INTERLEAVE - Alternate between single and double to create a half-step in between.This can result in smoother operation, but because of the extra half-step, the speed is reduced by half too.
MICROSTEP - Adjacent coils are ramped up and down to create a number of 'micro-steps' between each full step.This results in finer resolution and smoother rotation, but with a loss in torque.
Note: Step is a synchronous command and will not return until all steps have completed.For concurrent motion of two motors, you must handle the step timing for both motors and use the "onestep()" function below.
Speed - the speed in RPM
Note: The resulting step speed is based on the 'steps' parameter in the constructor.If this does not match the number of steps for your motor, you actual speed will be off as well.
Adafruit motor shield V1.0
https://learn.adafruit.com/adafruit-motor-shield
AF_Stepper Class Modified for the Leonardo by Michael Margolis
https://learn.adafruit.com/afmotor-library-reference/af-stepper-class
Modified for the Leonardo by Michael Margolis
Basic Analogue Joystick
Ref : http://arduino.cc/en/Tutorial/AnalogInput
Build from:-
AFMotor_MultiStepper.pde
http://www.airspayce.com/mikem/arduino/AccelStepper/AFMotor_MultiStepper_8pde-example.html
IMPORTANT:
Works with all Arduino including Leonardo, Mega using modified AFMotor for the Leonardo by Michael Margolis
Version 1 of the motor shield
Michael Margolis more information
http://www.oreilly.com/pub/au/4466
and also requires:-
The AccelStepper library for Arduino
http://www.airspayce.com/mikem/arduino/AccelStepper/index.html
Control both Stepper motors at the same time
Public domain!
Video is use as a test
http://www.dailymotion.com/video/x2pjbhc_pan-and-tilt-camera-steppers-and-arduino_tech
 Esmacat
Esmacat
 peterbdavenport
peterbdavenport