 Matthew Borgatti
Matthew Borgatti[The Neucuff is a research prototype and is not intended for clinical use or sale.]
Why an elbow cuff?
The Neucuff is an extension of the soft robotics research Super-Releaser has been pursuing for the past few years. It is a collaboration between Kari Love and Matthew Borgatti, who have joined forces to blend human factors knowhow with 3d printing and materials science.
We approached a wide variety of people asking where soft robotics could be best applied. we talked with civil engineers about exploratory robots for mapping pipes in construction sites. We talked with NASA scientists about soft robots in space. The most promising ideas came from my father, an orthopedic surgeon specializing in arthroscopy and shoulder reconstruction, and my robotics mentor, who has spent the last ten years in the medical device field.
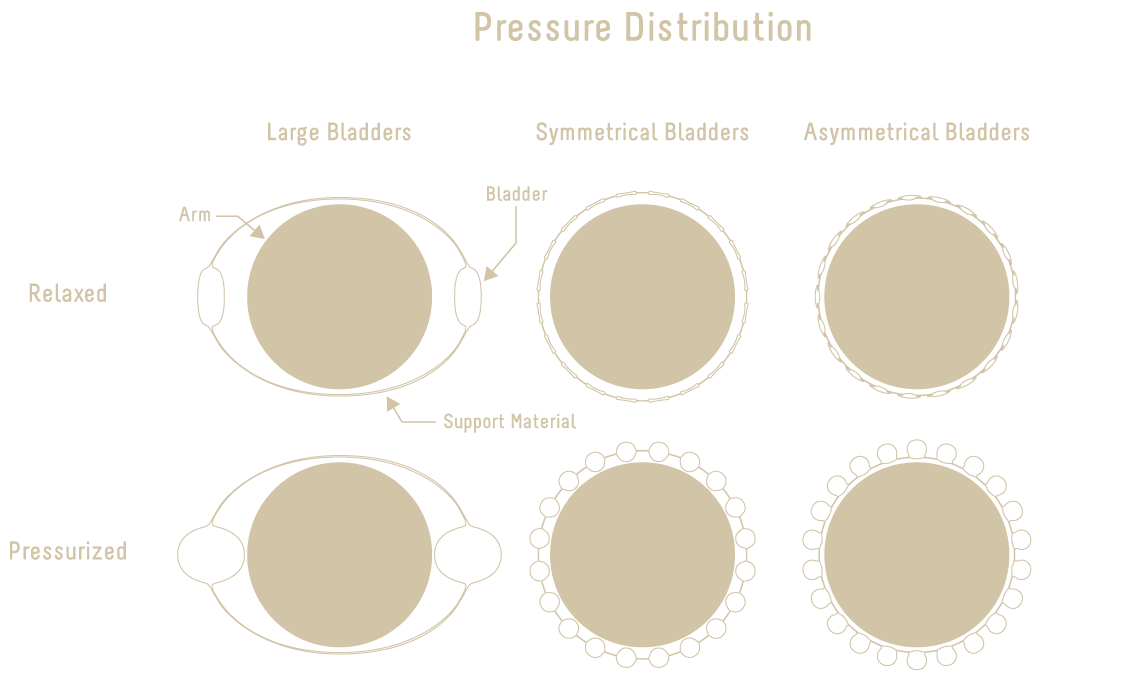
They both described problems with therapeutic robots that a soft robotics approach could solve. Soft robots are good at spreading force evenly across a large area. Soft robots are conformal so they can fit a wide variety of applications and environments by design. This makes them an ideal candidate for Cerebral Palsy therapy.

What are orthotics for?
Nearly a million people in the US suffer from CP. It's a congenital neurological disorder that causes spastic motion in the limbs, often resulting in a clenched posture. One of the biggest factors in quality of life (QOL) outcomes for CP patients is the ability to use their arms. If you have control of your arms, especially at the elbow, it can mean the difference between being ambulatory on crutches, able to live in a second story apartment, able to drive a car, able to feed yourself, and being dependent on a wheelchair and a caregiver. Devices that improve elbow extension in CP patients have shown huge improvements in QOL, but the current products out there have some major drawbacks.

Soft robots and the body
It turns out that interfacing with the body is pretty hard. If you've ever bought shoes online only to find out there was a subtle but significant difference between the designer's notion of how they should fit and how your body is actually shaped, you know how important fit is. Also, you'll know how hard it is to get something exactly situated on the complex topography of the body. Add on robotic elements, power supplies, sensors, and methods for washing and maintaining that thing over time and you have a serious, complex, expensive shoe on your hands.
If you're a child born with CP, any orthotic device will have to be continuously replaced or re-fit to your body as you grow. Any change means multiple visits to a clinic for adjustments and possibly a huge expenditure on a brand new device. A soft robotic cuff offers the possibility of extending the elbow gently no matter what size the patient is. I picture there being a small, medium, and large cuff, as opposed to an infinite variety of custom tailored solutions.

Affordability and practicality
These design constraints: fit, product life cycle, and manufacturing complexity, make most orthotic robots tremendously expensive. Beyond all the time, engineering, and money it takes to pass the FDA's understandably high hurdles for medical robots, a complex design is simply expensive to produce.
Another advantage of soft robots is that a lot of complexity can be baked into a simple production method. We've made walking quadrupeds out of a single silicone casting. That's 10 actuators fabricated in one simple step. It doesn't matter whether that casting is performed by a person on a lab bench or a machine injecting HTV silicone into a machined mold - the principle is the same. I think that making a technology practical is, in large part, about finding ways to automate its production.
From prototype to product
We are not under any illusions about taking on a hard, complex problem in a field that's already filled with brilliant designers. We don't expect to touch down from Planet Hacker and rock everyone's world in an afternoon. This project...
Read more »








 peter jansen
peter jansen
 Ovidiu Sandru
Ovidiu Sandru
 Ultimate Robotics
Ultimate Robotics
 Vaibhav Chhabra
Vaibhav Chhabra{kind=link}
Am obtaining intellectual property protection for a product.
Would you be interested in possible collaboration on a part of this product.
It involves, pneumatics similar to your device
Thanks
Frank (arch616135) (architecnologies@yahoo.com/simplifiidesign.com)