 Eric Hertz
Eric HertzINTERESTED IN JOINING this project? Do feel free to click that "Request To Join" button! But no requests will be granted without either A) at least 3 (three) paragraph*-long reasons regarding "Why I [you, not me=the writer of this project description] Hate 3D Printers" or B) at least 4 (four) reasons regarding the afore-mentioned hatred for 3D-printers, at least 2 (two) of which must be at least a paragraph* long or C) (UPDATED per @frankstripod's evil ploy to take over the world) The full solution to the #itanimulli Puzzle project in a private message.
(* NOTE: a "paragraph," as used here, is defined as at least 3 (three) sentences related to a singular topic. Groupings of three+ (>=3) sentences in which less than three (3) sentences relate to the topic-in-question will not be considered as meeting the Join-Request criteria).
(WARNING: This project includes ideas for 3D-printers.)
LOG Table Of Contents-ish And Related Links:
- @johnowhitaker's whole 2-axis system working great! #Mini Laser Cutter
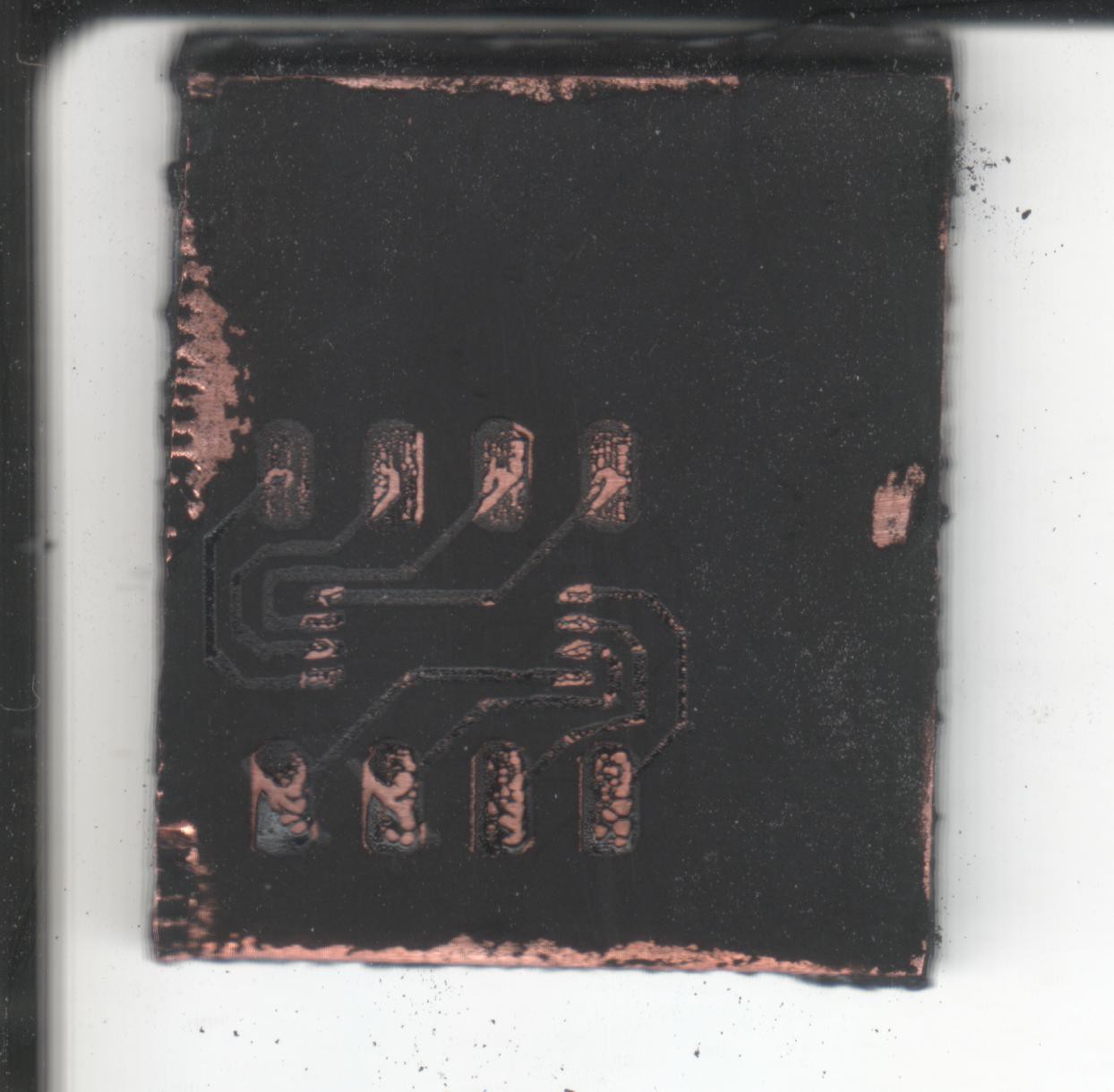
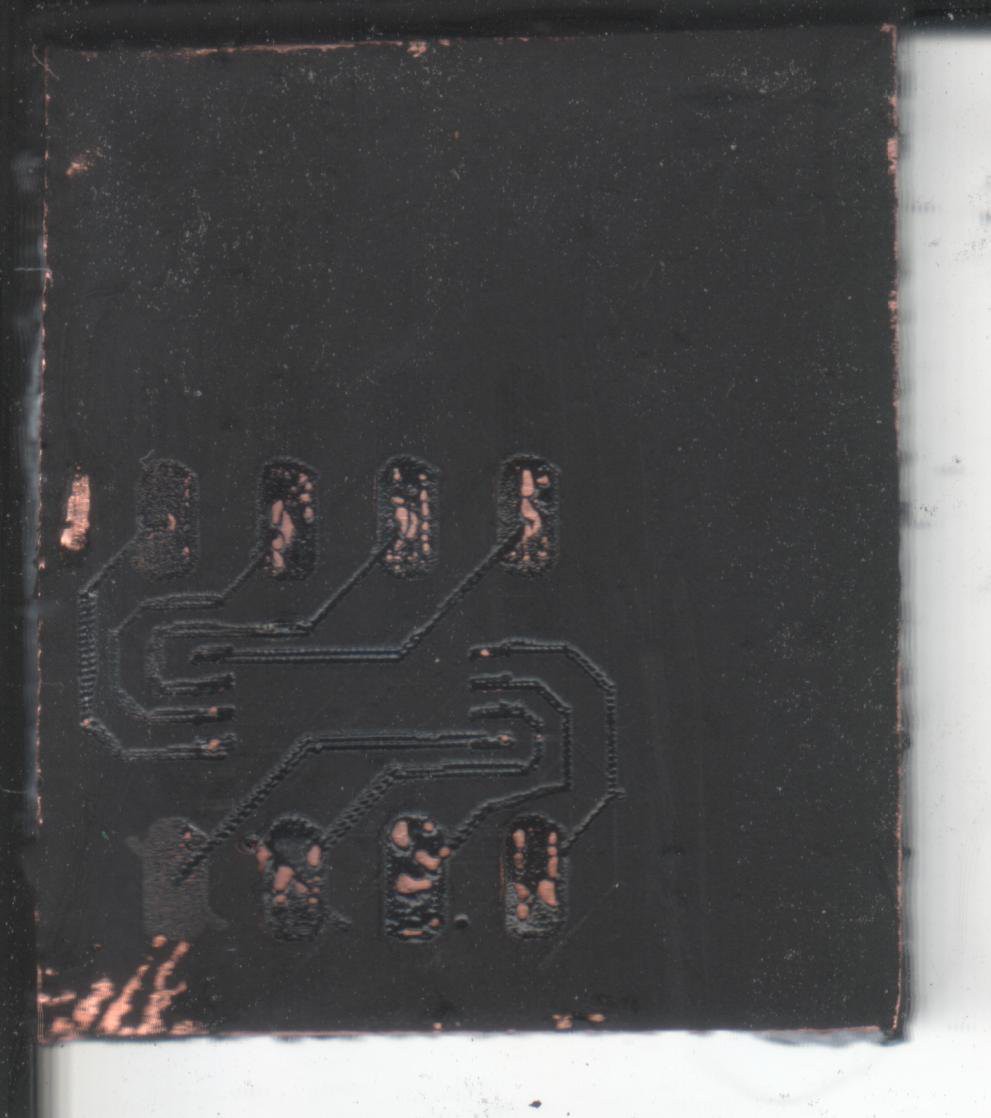
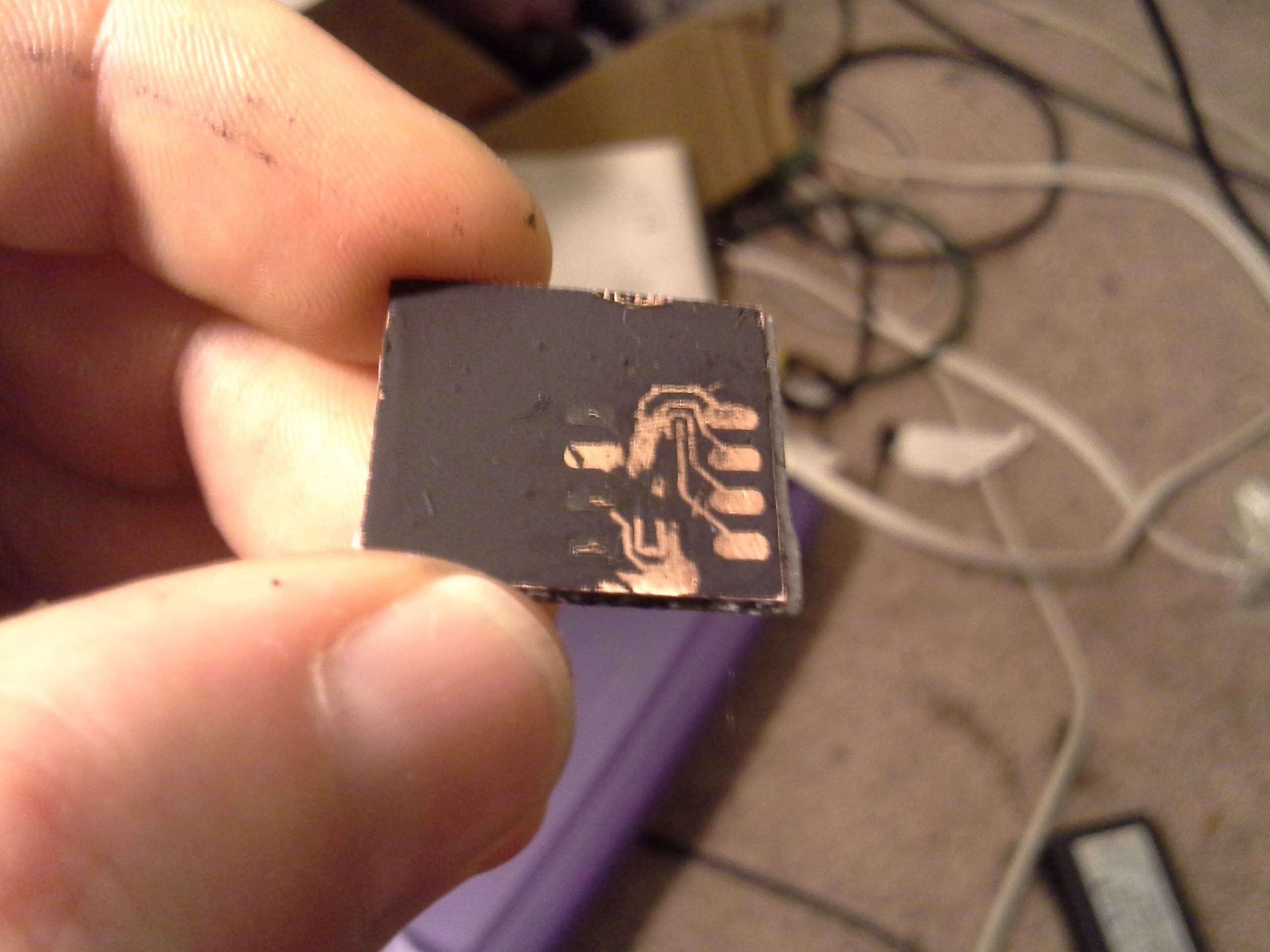
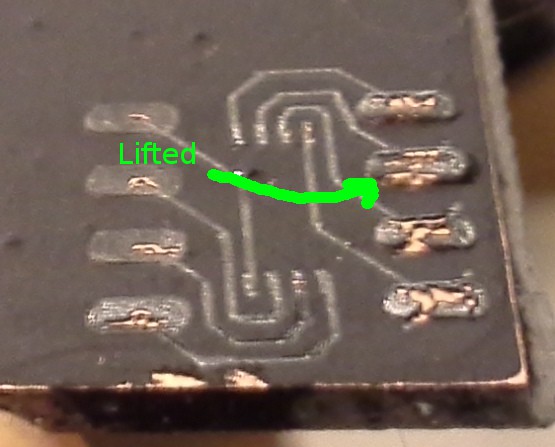
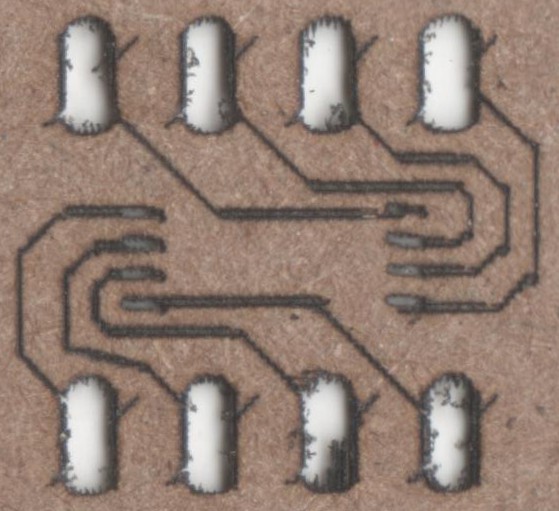
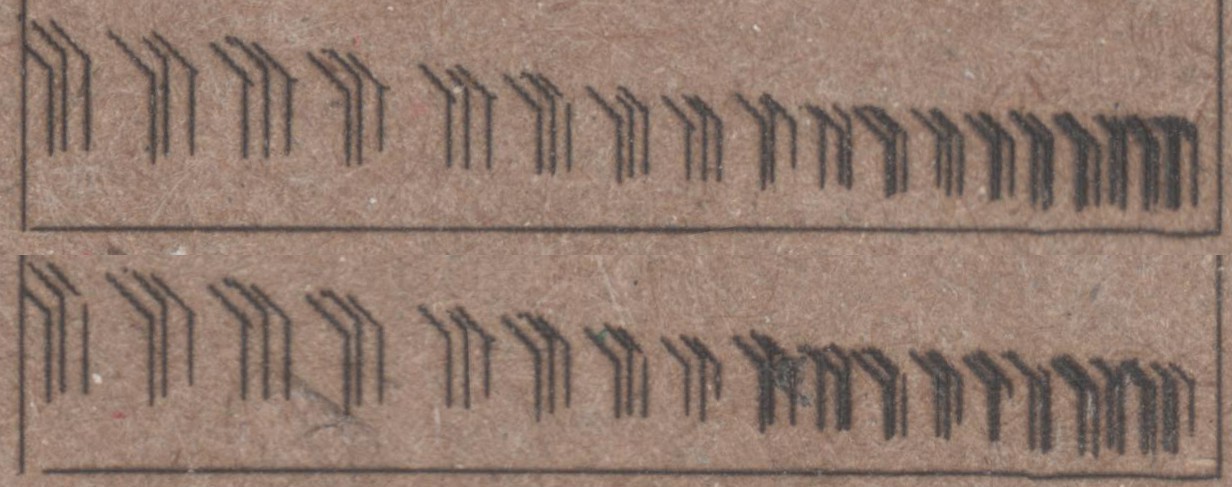
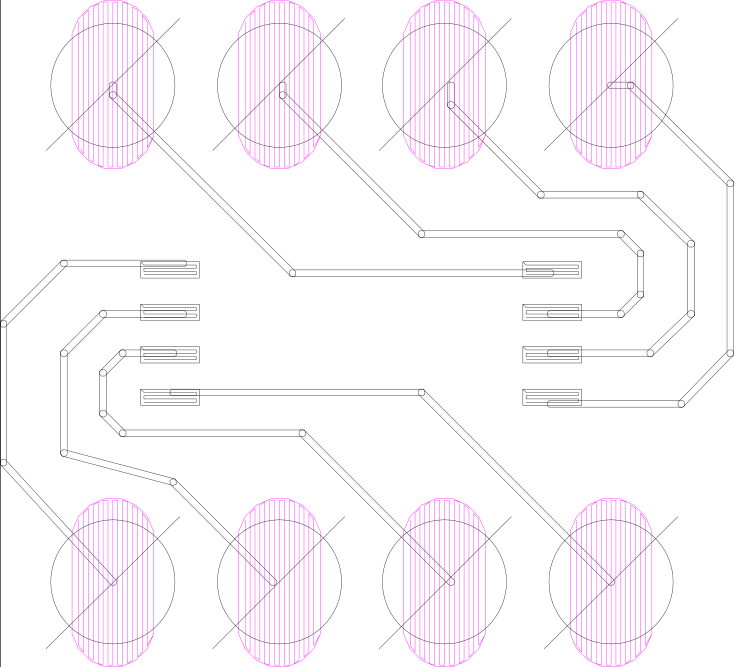
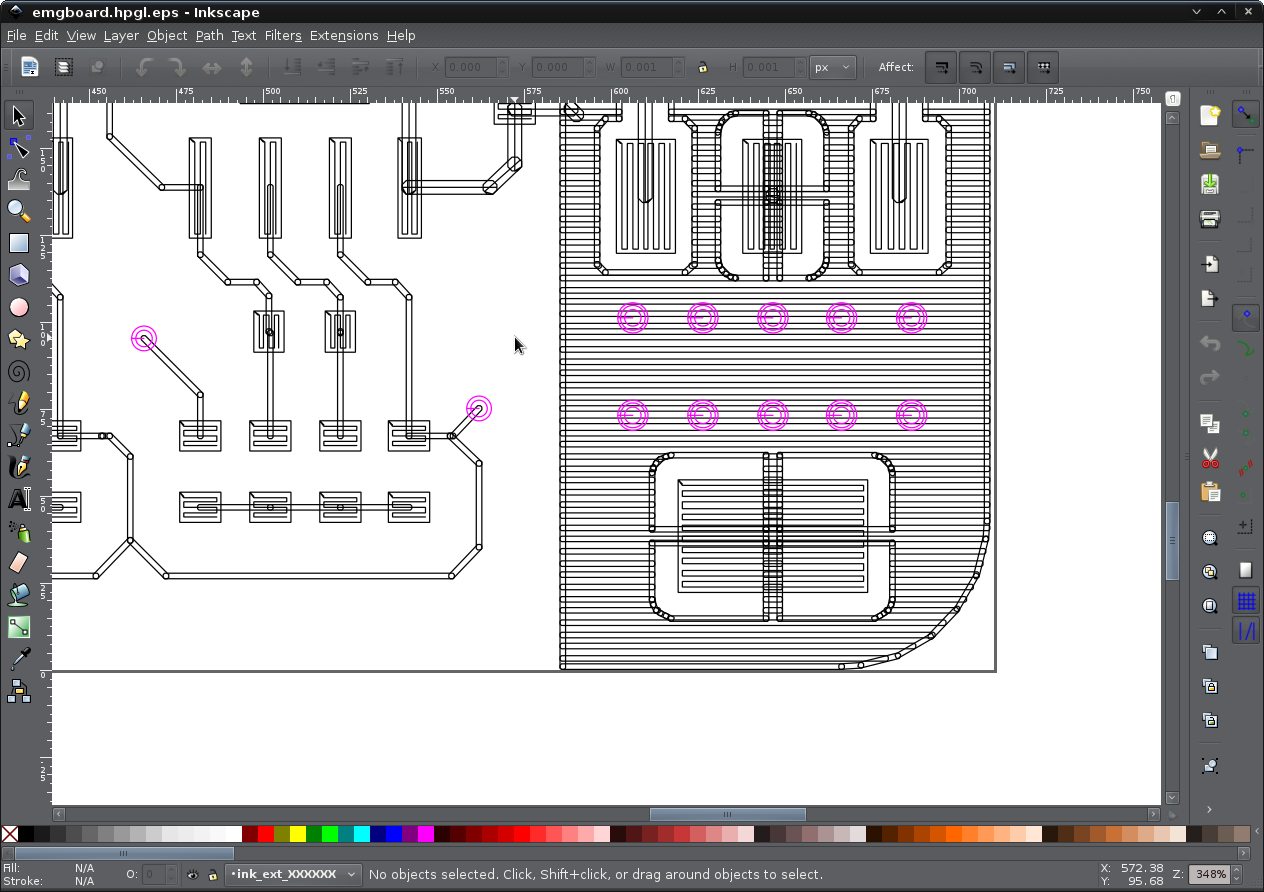
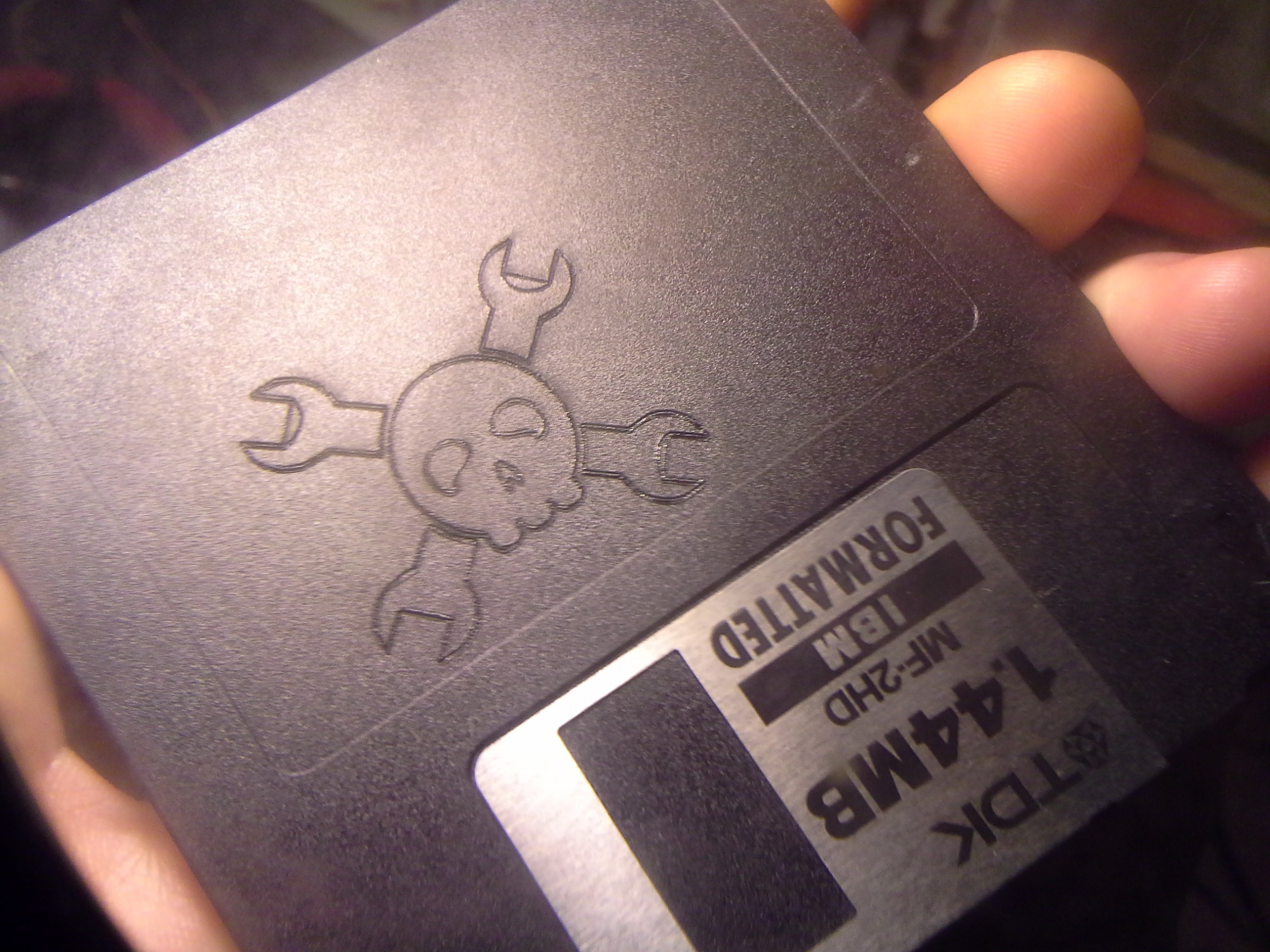
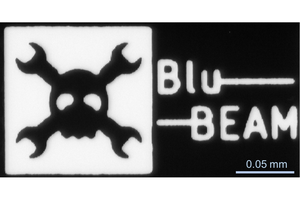
- HOLY SNAP! Laser (verb) toner directly onto surfaces (e.g. copper-clad board). Originally submitted as a log-entry at this project, @johnowhitaker has now started a prize-entry/project-page over at #Mini PCB printer. Check it out!
- Very promising experiments using nothing but a magnifying glass and the sun! https://hackaday.io/project/7535-cddvd-mechanisms-and-cartesian-thinggies/log/28905-newbie-his-setup-and-the-sun
- @DeepSOIC Has Found A Definitive Way To Determine how much current to drive your DVD-Laser without burning it out! #Measuring DVD-RW laser (How'd I not link this already?!)
- https://hackaday.io/project/7535/log/24634-in-the-wild-pcb-spraypaint-lasering
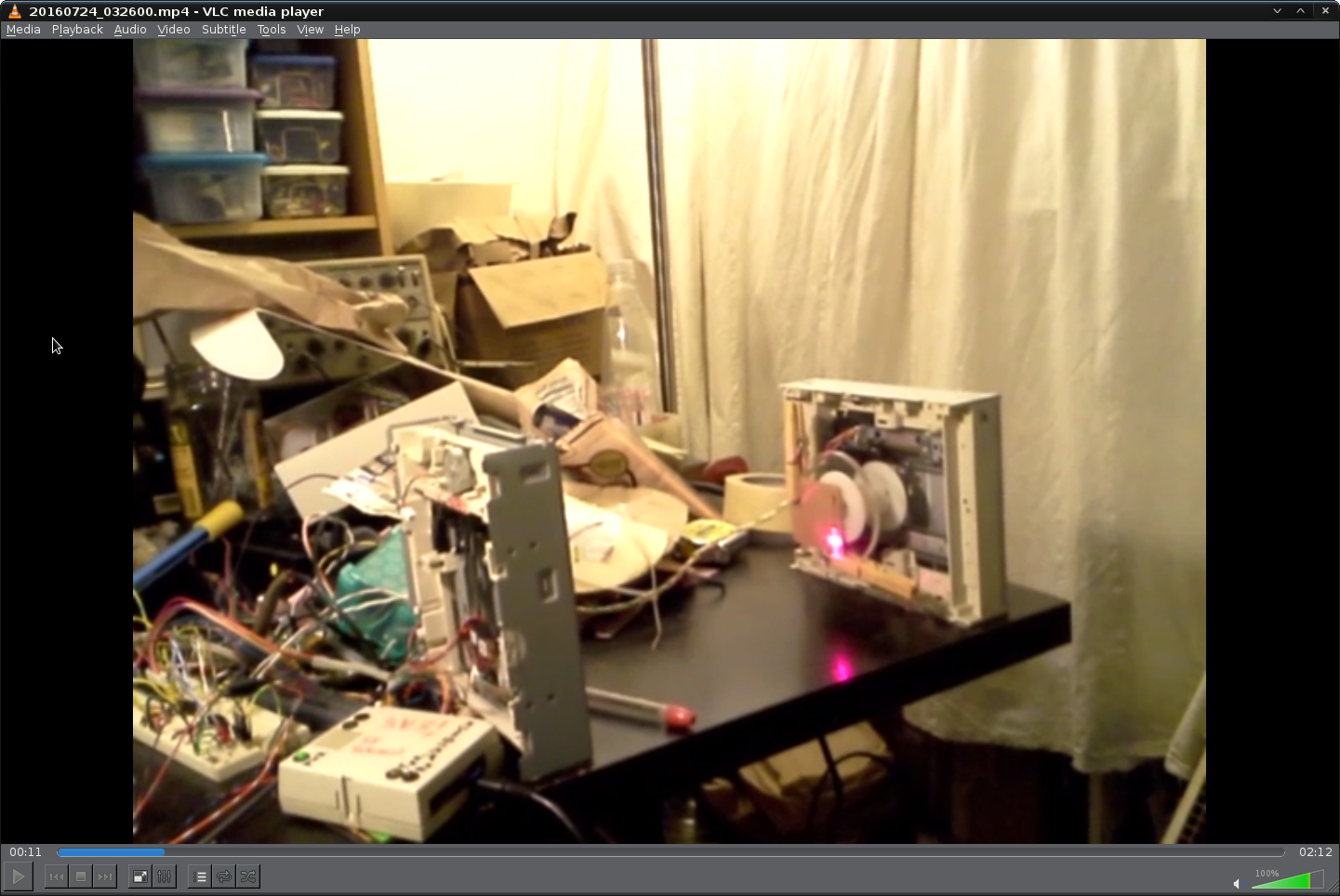
- A 2-axis DVD-sled lasering-setup available for order + a video
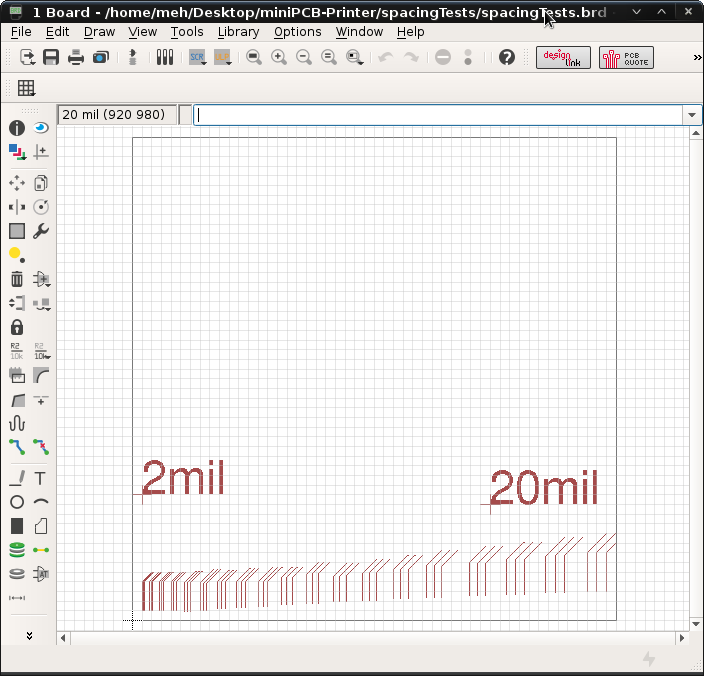
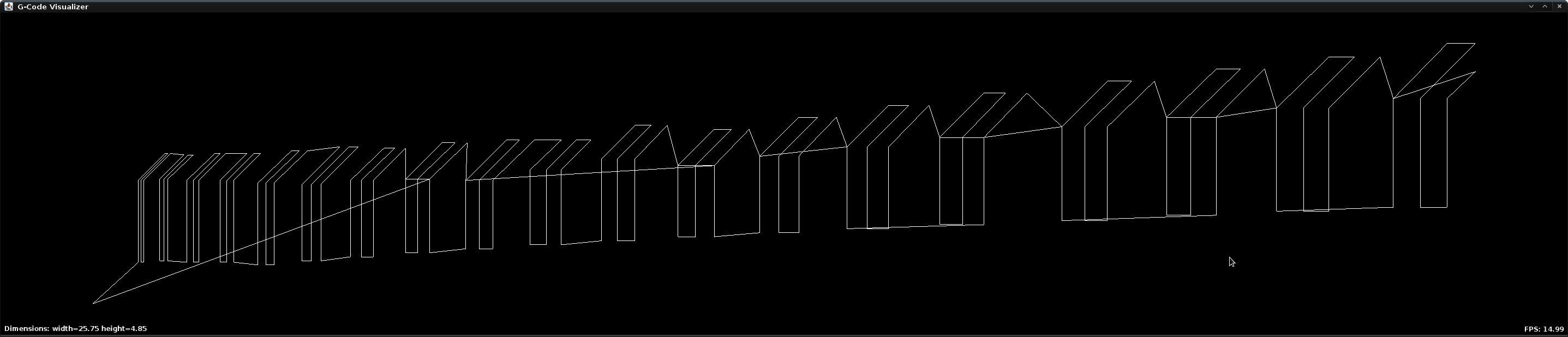
- Conceptual ideas on laser-etching spraypaint as etch-resist for PCBs
- Drive Collections:
- Random things/findings: https://hackaday.io/project/7535/log/24676-random-absurdities
- X = scanner, Y = Inkjet Printer, Z = DVD... Duh
- Use that drive's enclosure...
- "fin-grippers"
- https://hackaday.io/project/7535-cddvd-mechanisms-and-cartesian-thinggies/log/25786-secret-art-side-project
- Check out this hacker's cool setup... not part of this project, but a slick use of the sled-mechanics for ultrasonic interferometry(!?) @Andrew Ferguson's #Standing waves of sound as well as laser-interferometry using our favorite DVD parts #Michelson interferometer
- Laser Diodes:
- https://hackaday.io/project/7535/log/28933-laser-diode-ma-vs-mw-misunderstandings-in-previous-logs
- WHOOPS! Read @esot.eric's earlier logs' mA vs mW comparisons with considerable skepticism!
- https://hackaday.io/project/7535/log/24728-laser-driving
- Constant-Current "DDL" circuit and interpretation
- https://hackaday.io/project/7535/log/24783-laser-focusing-experiments
- Early focusing experiments, bare-diode, through the sled, removal of the focus lens
- https://hackaday.io/project/7535/log/24945-burning-out-a-laser-diode
- Burning out a diode, interesting effects
- Circuit photographs
- https://hackaday.io/project/7535/log/24948-solar-irradiance-and-comparing-incoherent-vs-coherent-power-cd-diodes-maybe-burn-speed-mw
- burn-speeds vs mW ratings, and ramblings on current-ratings...
- possibly using the CD laser as well as the DVD for extra oomph.
- ramblings on using a different light-source (high-power LED?)
- 100mW is "plenty fun"
- https://hackaday.io/project/7535/log/25180-dc-motor-revisited-another-one-laser-bites-the-dust-beam-focussing
- Focusing a narrower beam with a magnifying glass and the drive's focus-lens
- "burnt" diodes are still useful!
- https://hackaday.io/project/7535/log/28933-laser-diode-ma-vs-mw-misunderstandings-in-previous-logs
- Stepper Motors:
- https://hackaday.io/project/7535/log/25002-driving-them-stepper-motors
- "steppers are certainly easier to work with"
- use nothing but a quadrature knob and a motor-driver chip
- extract a motor-driver from old floppy drives
- *use* old floppy-drive circuitry (step/direction)
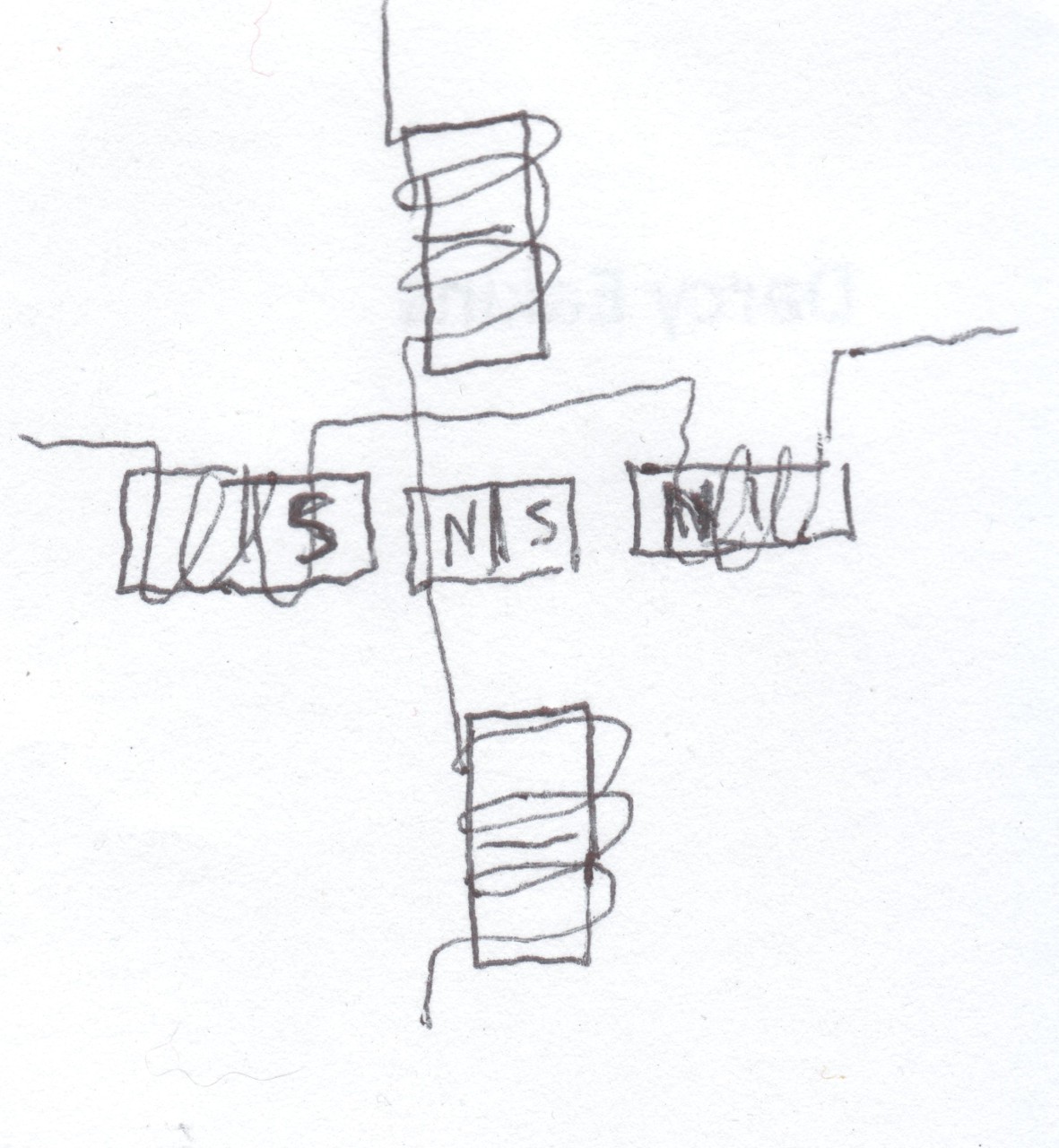
- winding-wiring
- missing-steps (might...
- "steppers are certainly easier to work with"
- https://hackaday.io/project/7535/log/25002-driving-them-stepper-motors

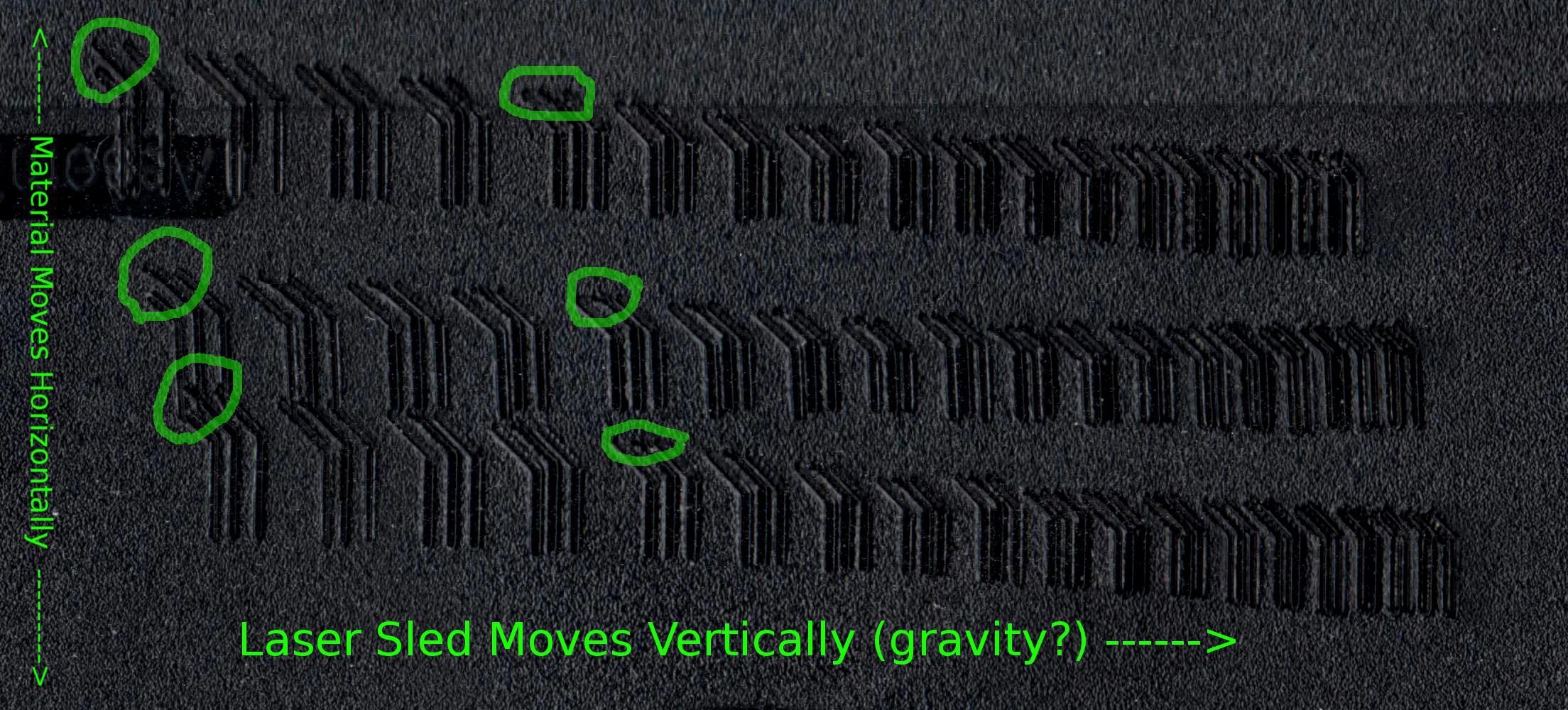
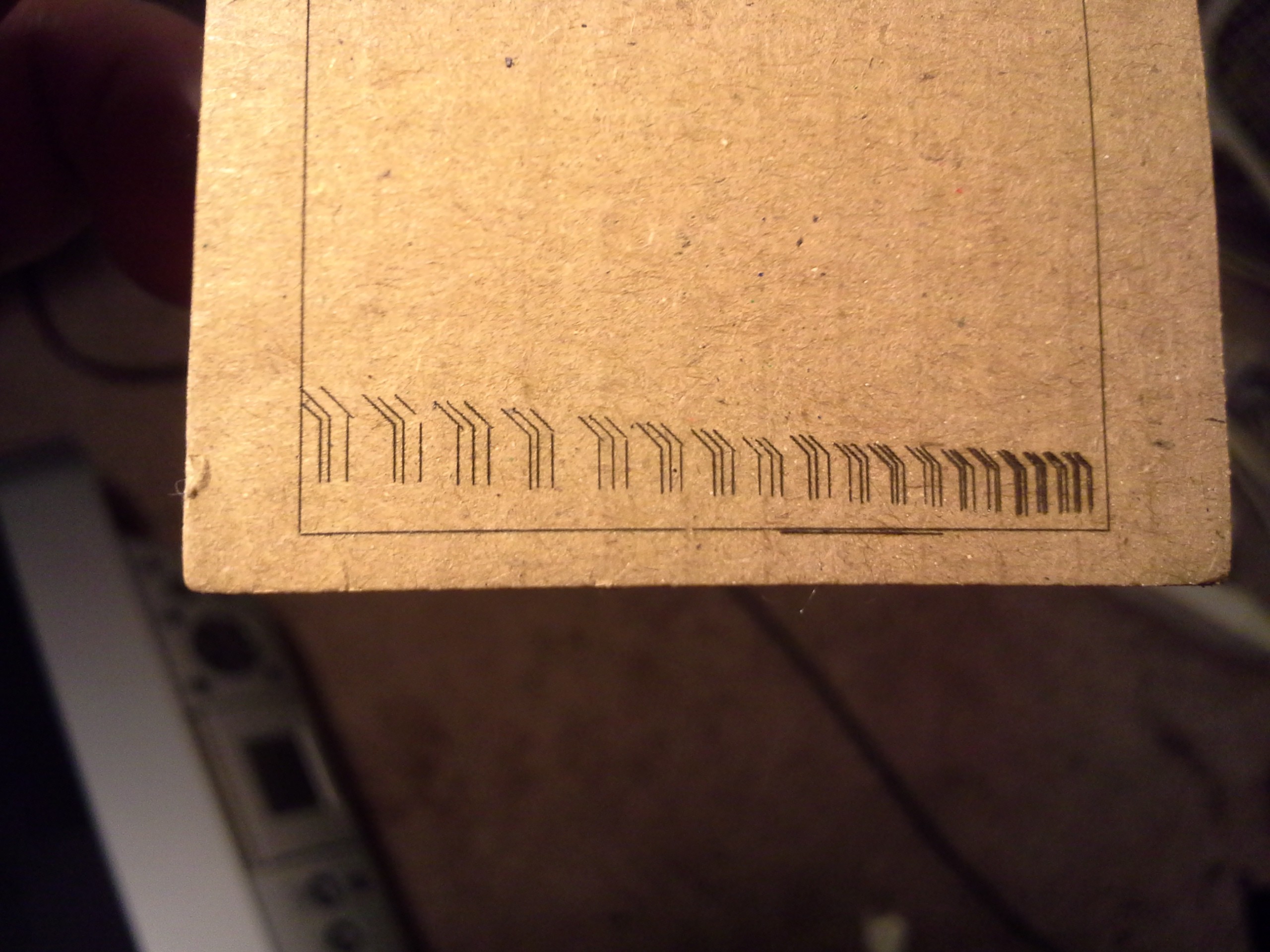


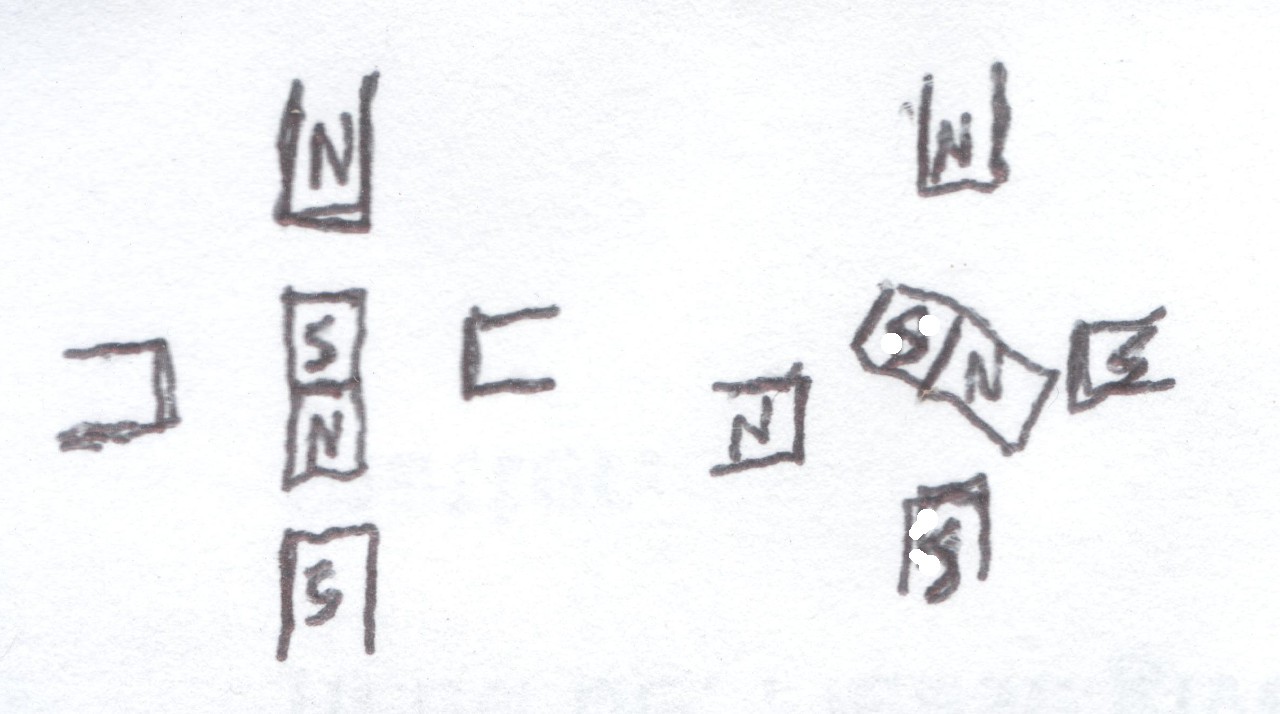
 ...This is caused by the magnetic attraction to the pole that the motor
coils are unable to overcome as well...
...This is caused by the magnetic attraction to the pole that the motor
coils are unable to overcome as well... (simplified, further:)
(simplified, further:)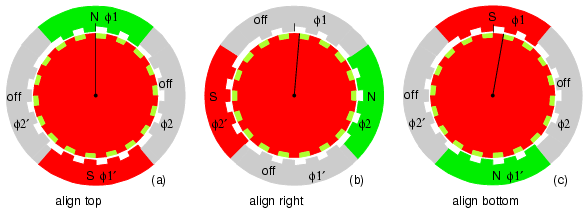
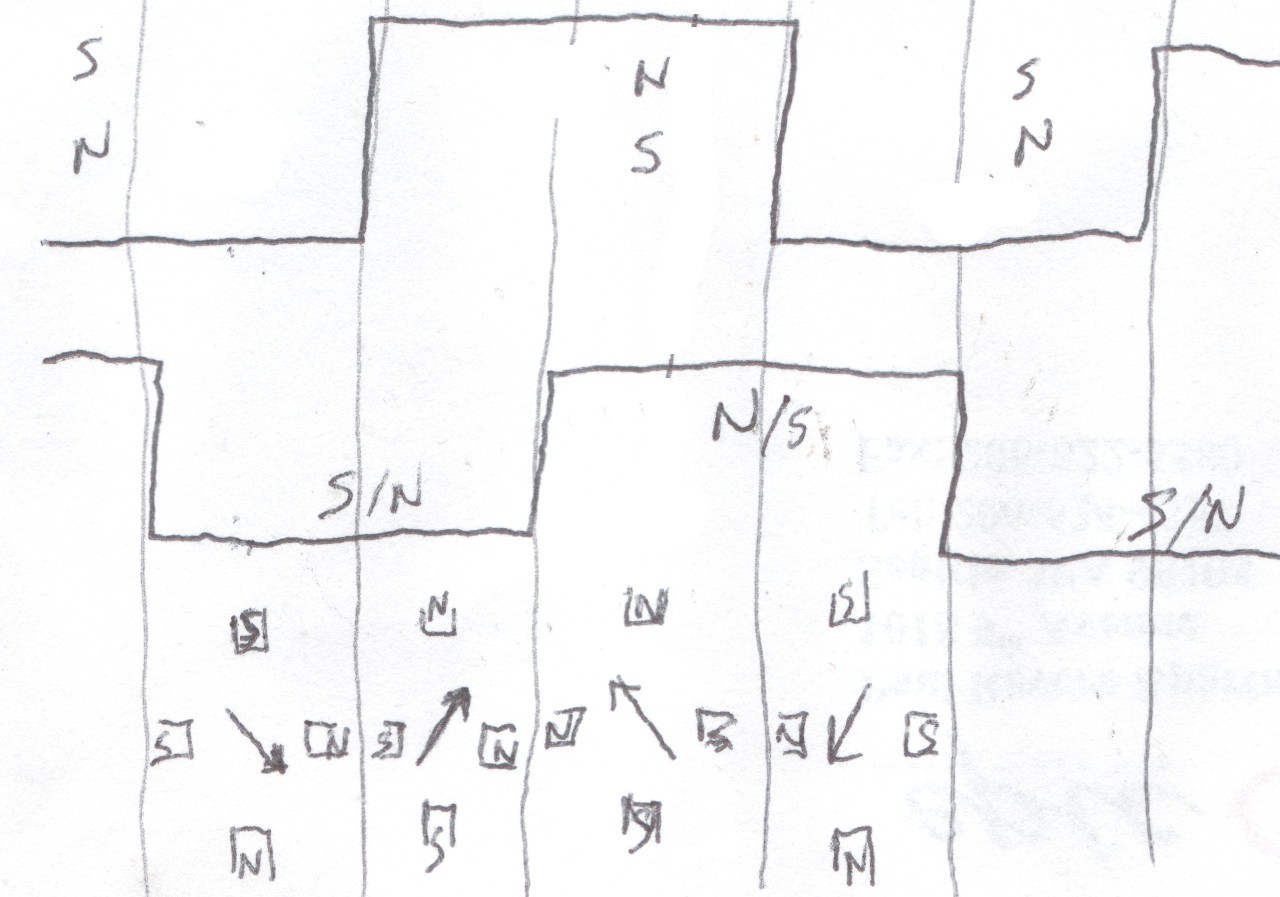
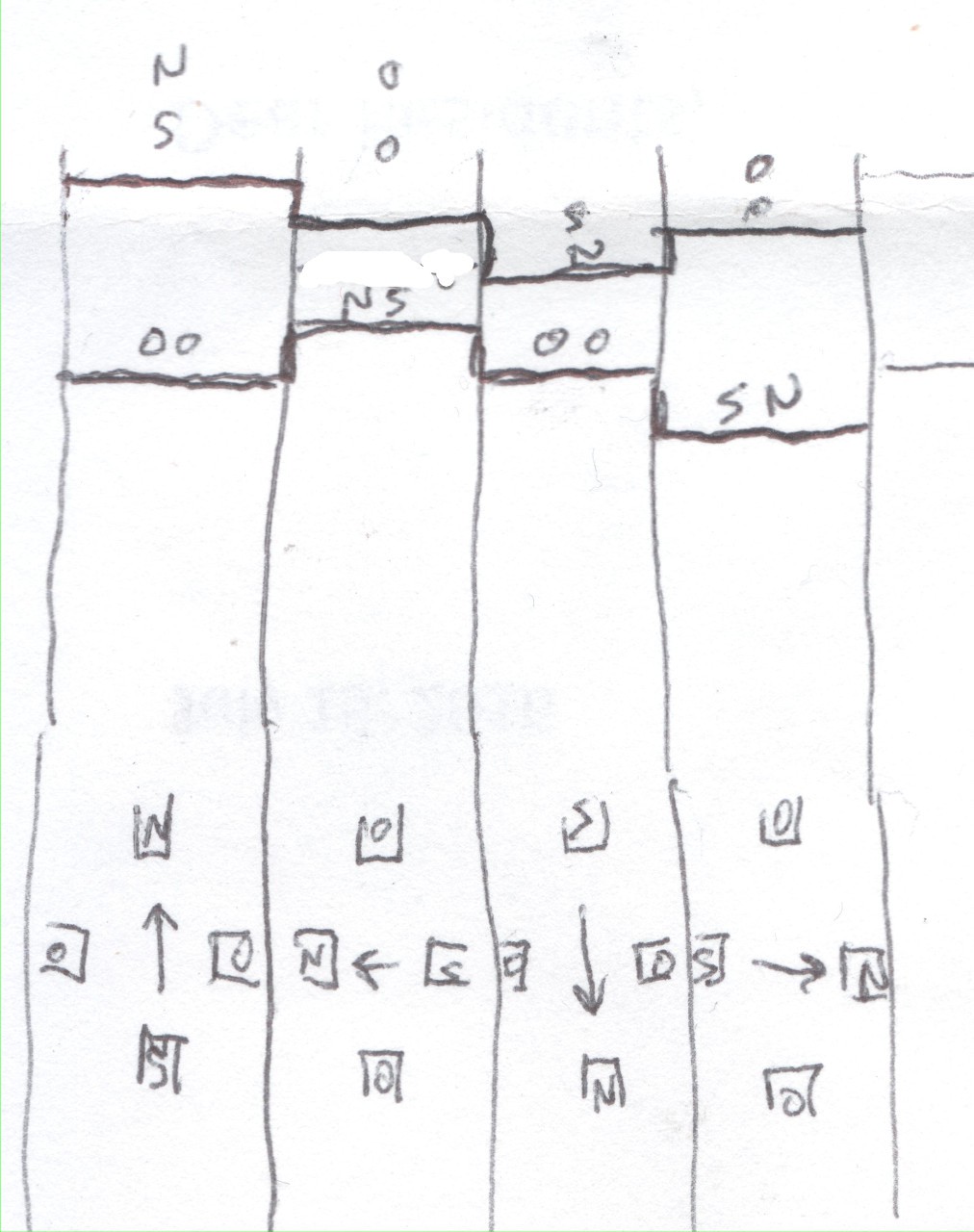 As far as *typical* bipolar-driving goes, this method is less-typical, as it requires more sophisticated circuitry that not only can reverse polarity, but *also* can disable power to the windings. But let's go with this for a second, because, again, this is *much* more closely-related to the typical *microstepping* method used for bipolars.
As far as *typical* bipolar-driving goes, this method is less-typical, as it requires more sophisticated circuitry that not only can reverse polarity, but *also* can disable power to the windings. But let's go with this for a second, because, again, this is *much* more closely-related to the typical *microstepping* method used for bipolars. 








 andreas.betz
andreas.betz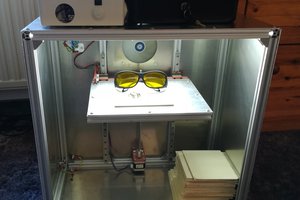
 Dominik Meffert
Dominik Meffert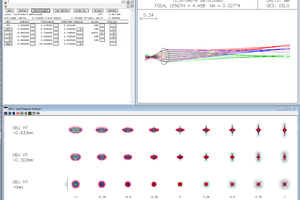
 helge
helge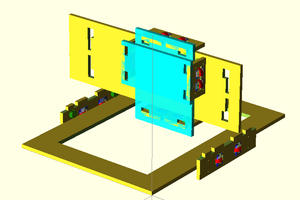
I found a 5 cd deck with record option in the roadside trash the other day. Was thinking of using the power supply but now you have given me more ideas ( Like I need more projects ). Thanks for the neat ideas :-)