 HappyFox
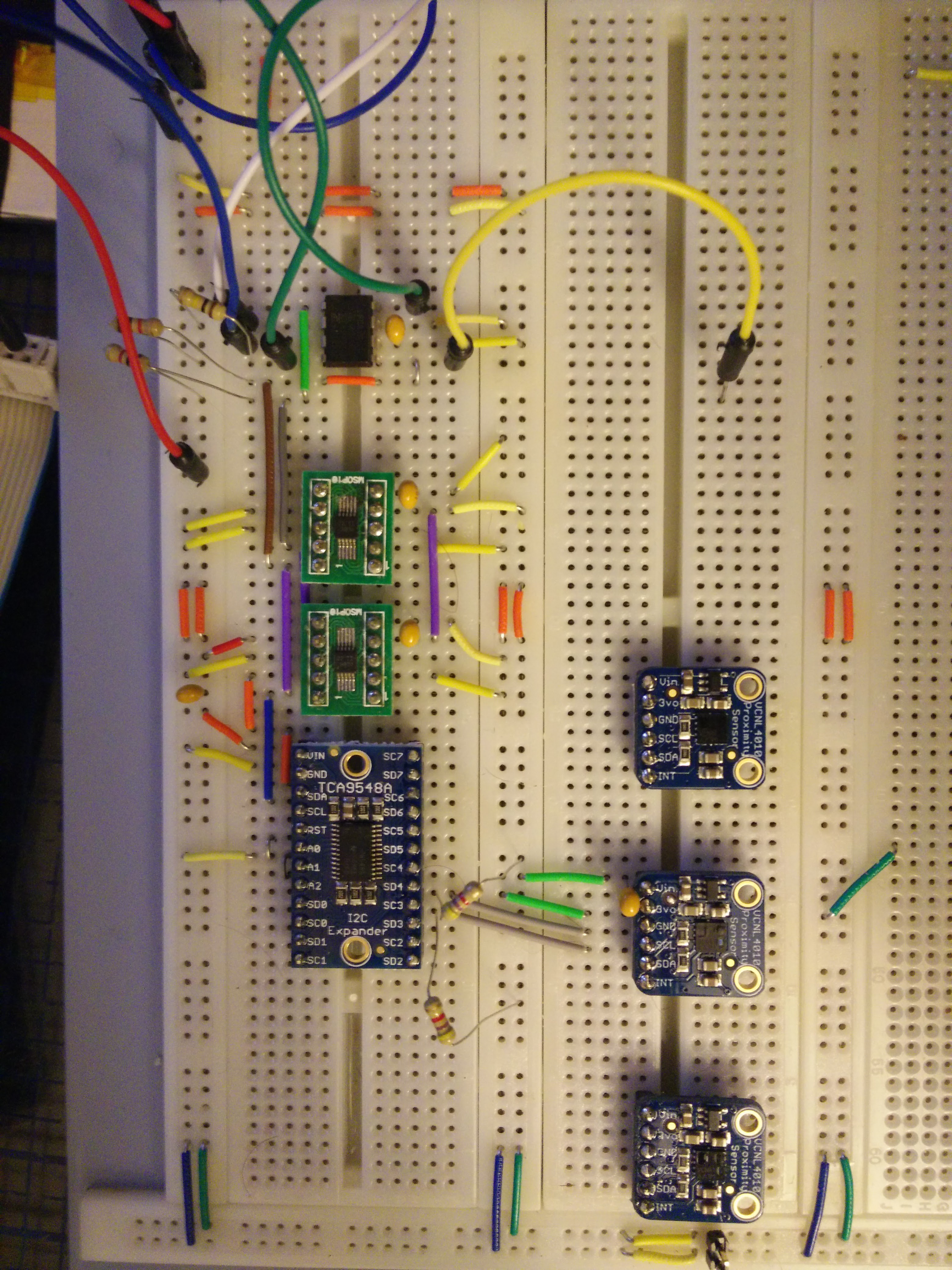
HappyFoxCurrently I can program the LPC810, debug it with SWD and have managed to get the DRV8830 motor controllers up and running.
The 810 has a i2c api in it's rom, which makes the controlling of i2c devices relatively easy. Programming is done by holding pin 5 low during startup, then pin 8 and 2 become RX and TX respectively. Then you can up load your code via serial.
Currently I have SWD, serial and i2c enabled. That means I have had to override the reset pin. As I have SWD debugging working I was planning to disable serial to get reset back, but that means I will have to have a 3 poll switch to switch the lines to the serial connection.
The code is currently hacked together and not suitable for publishing, when I re-work it to something decent I will published it.
A quick video overview.




 Tim Wilkinson
Tim Wilkinson
 Michael O'Toole
Michael O'Toole
 shane.snipe
shane.snipe
Please make sure to upload photographic or video proof of this project's PCB working by the next deadline (in about two days!)