Alberto
Alberto-
Face rotation + connection mechanism
03/16/2018 at 11:38 • 0 comments -
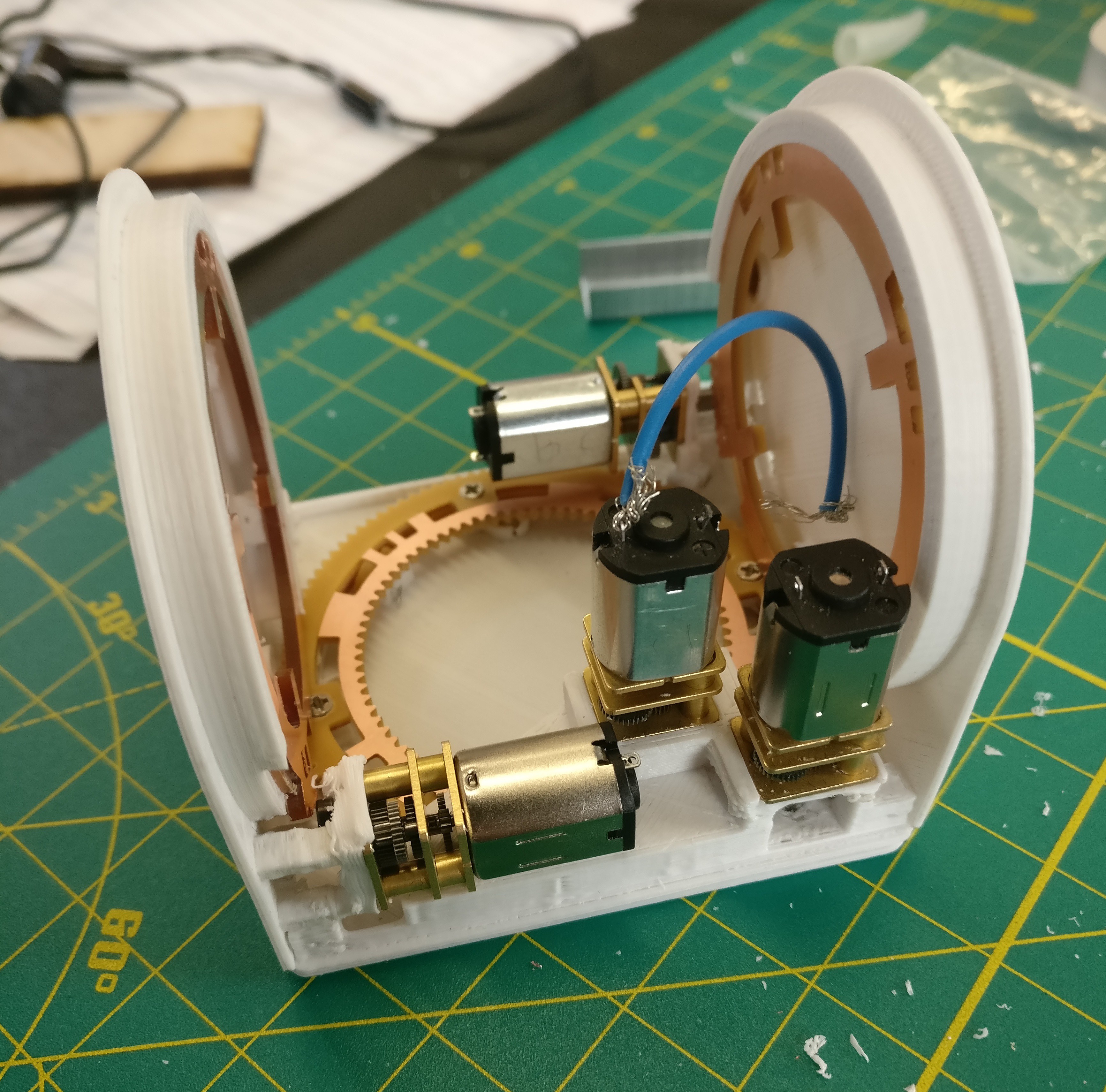
Dtto v3 mechanical structure
06/06/2017 at 22:21 • 0 commentsThis is how it looks the mechanical structure for the next version of the Dtto modular robot.
![]()
It will be using this small metal gear motors with huge reduction, so that we can get way more torque than on the previous generation.
Now I'm testing the durability of these white machined Delrin gears. They are lighter than the brass ones, and we need the modules to be as light as possible!
-
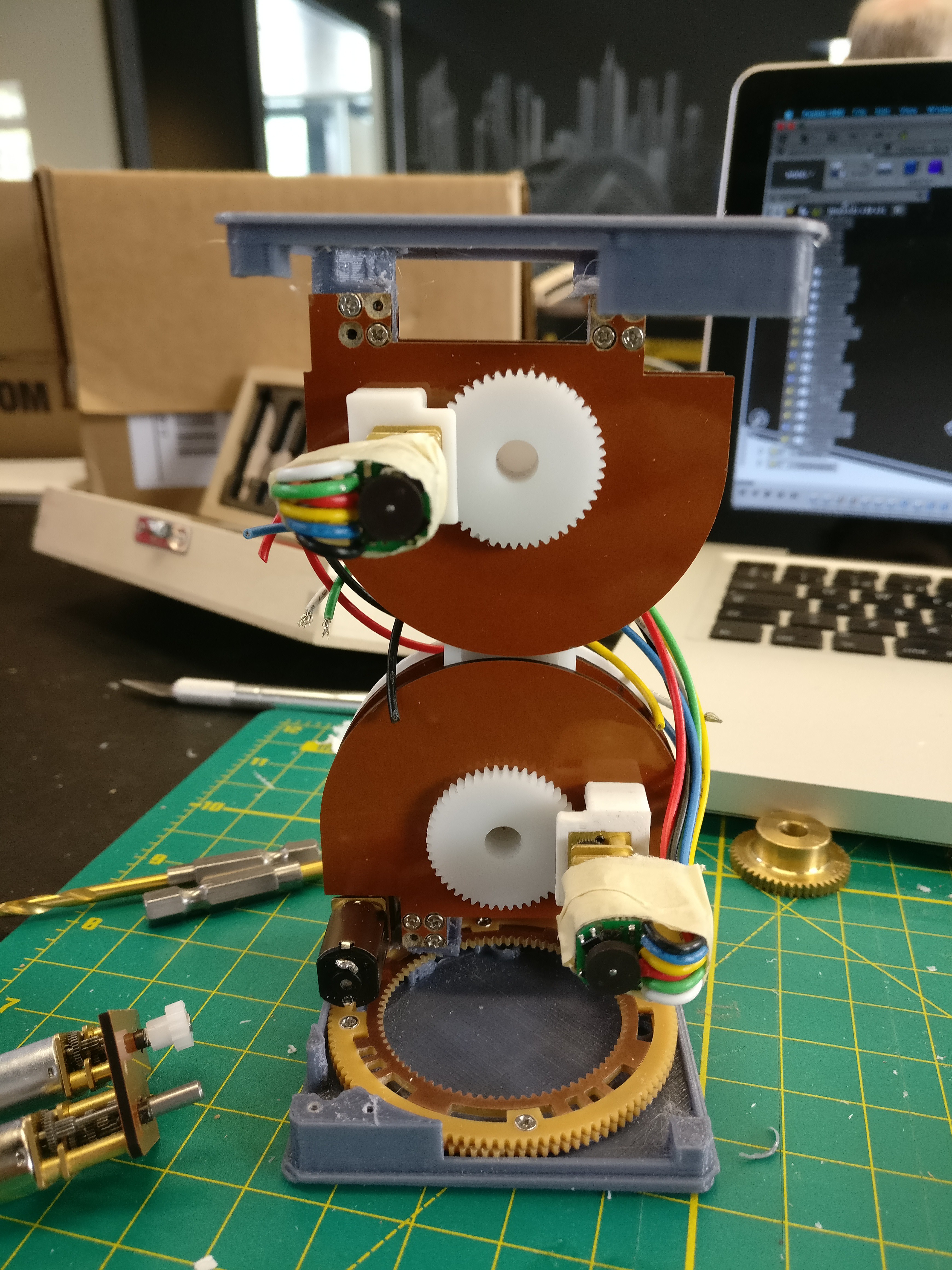
Coupling + face rotation
05/03/2017 at 17:17 • 0 commentsHere's a preview of all the coupling mechanisms + face rotation assembled!
![]()
-
Coupling mechanism for Dtto v3
04/19/2017 at 16:38 • 0 commentsNow I'm finally working full time on the project! And I have access to awesome 3D printers and CNCs and cool things at the Supplyframe DesignLab :).
The most critical part on the modules is the coupling mechanism that holds them together. This is a second design for holding the modules together:
Any ideas are welcome!
Alberto
-
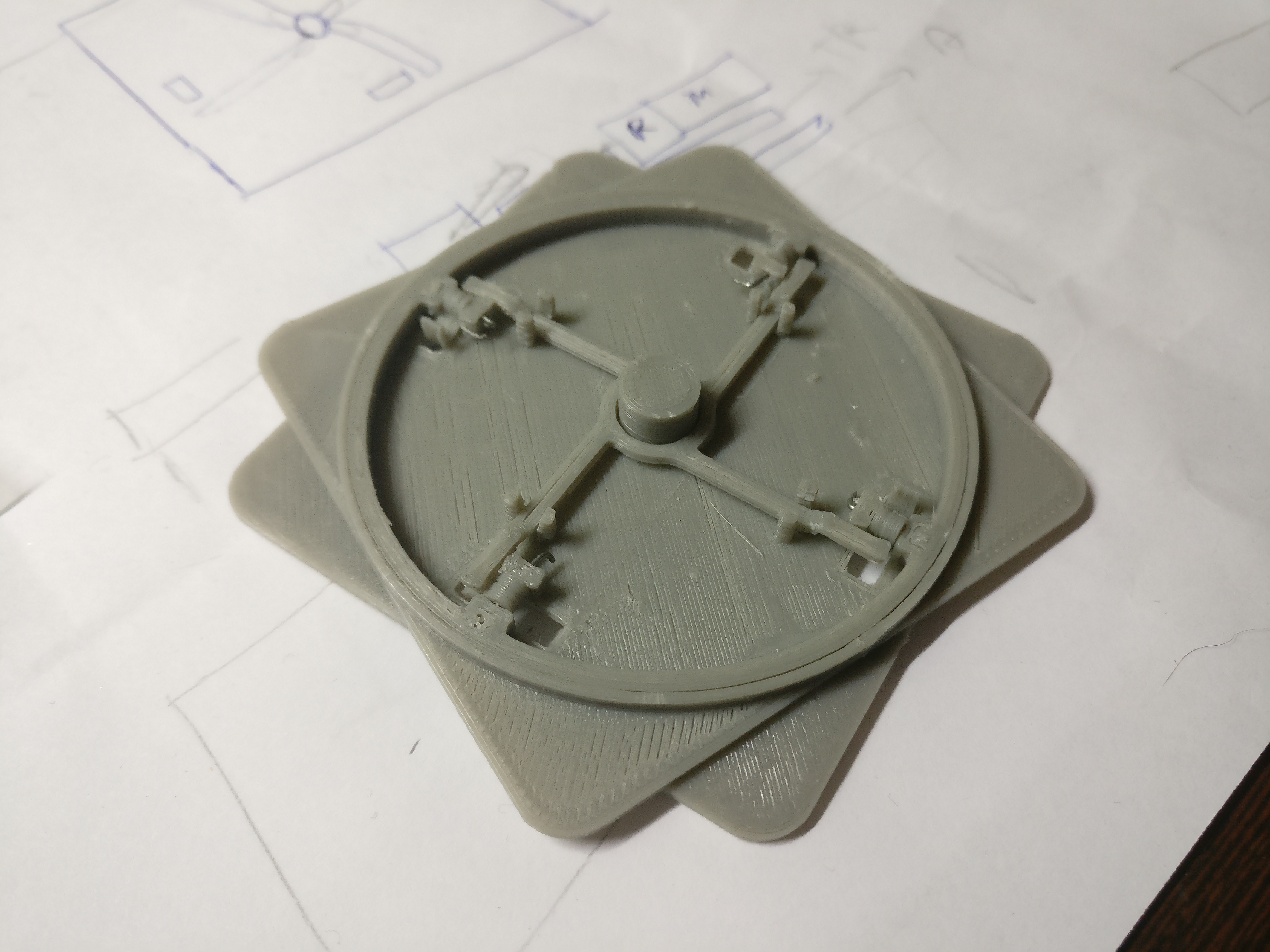
Working on Dtto 3.0!
03/27/2017 at 16:58 • 1 commentHello!
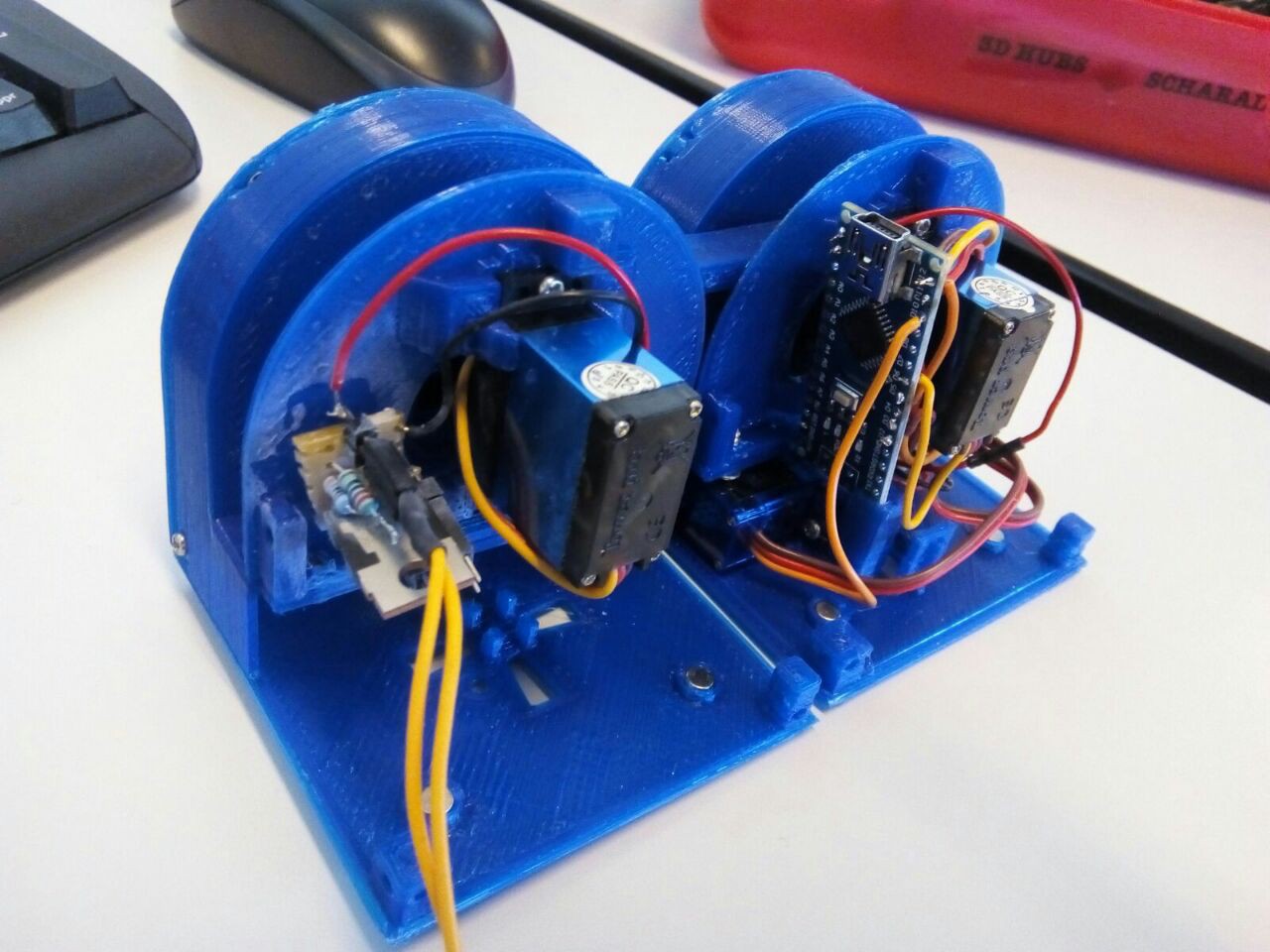
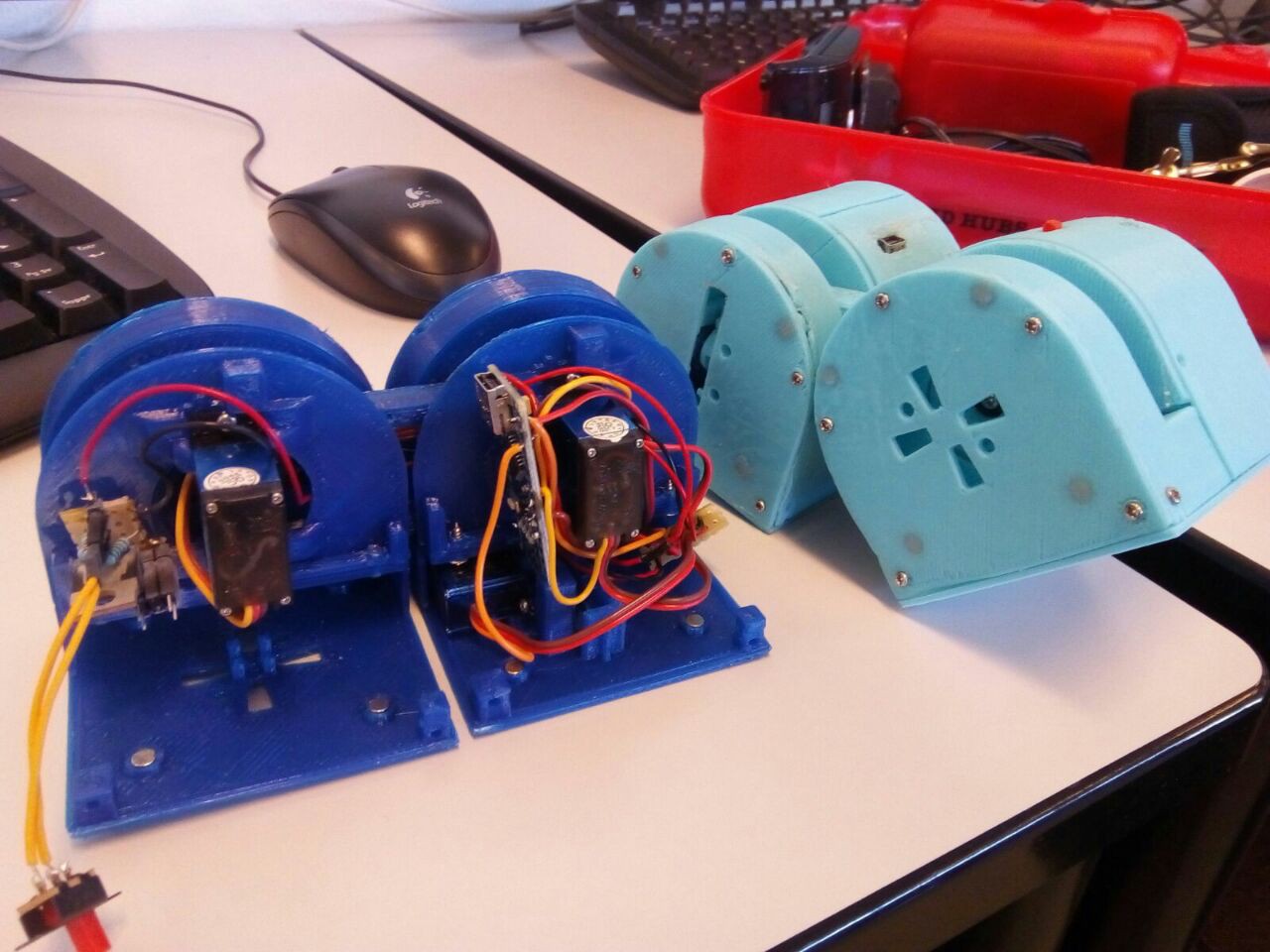
These days we've been trying to design a small mechanism that allows the 4 hooks to rotate with the full face of the module. The idea is that, when mechanically connected, the modules can change their relative position (for example, to change from a 2D worm structure to a 3D snake movement).
This is the first test, with the 4 hooks on the rotating plate:
![]()
Having rotating faces at both ends of the modules, we could use them as wheels to move on flat surfaces.
Still a looooot of work to do, we will keep working!
-
Dtto modular robot Work Team!
01/31/2017 at 09:35 • 0 commentsHello there!
We are now a small group of people actively working on the project! Some things that we are currently trying to improve are:
- More powerful main actuators
- Smaller coupling mechanism
- Controller software
- Robot software! (We still need some software guys interested in robotics :D)
- Redesign of the module: Same size, +1 DOF
We are working together in this gdrive folder; it´s open for everyone to see what´s happening inside :)
If you are interested in sharing something with us, please, don´t hesitate to contact us and we will add you to the workteam!
Thanks!!
Alberto
-
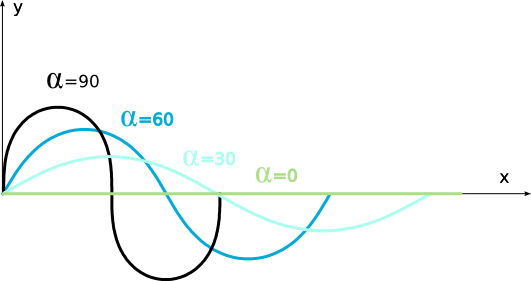
Math behind the serpentinoid movement
10/20/2016 at 18:07 • 0 commentsHello there!
Hoping to answer some questions, here you can find the mathematical equations describing the serpentinoid movement:
![]()
The studies by Hirose were the first ones on modelling the snake movement:
Hirose, Satoshi. Biologically Inspired Robots (Snake-like Locomotor and Manipulator.: Oxford Science Press, 1993.
You can also check this derived paper:
Simulation Study of Snake-like Robot’s Serpentine Locomotion Based on Recurdyn
; by Wang Nan, Pang Bo and Zhou Sha-Shahttp://maxwellsci.com/print/rjaset/v7-37-41.pdf)
And this documentation in Spanish by Juan González:
(I will probably make a document with all the documentation I´ve used as soon as I can…)
Thanks!
-
More Dtto Modular robots around the world :)
09/27/2016 at 19:00 • 0 commentsHellooo,
Today I want to share with you some pictures of the clones we already have!
The following pictures are from our friend Nathan, from France :
![]()
![]()
And here we have the pictures from our friend Nansong, China, who almost have now more modules than myself :D :
![]()
![]()
Thanks!!
-
Hexapod locomotion
09/14/2016 at 22:02 • 0 commentsHello!
Today I got the robot to walk like an hexapod robot... so here you have a video!
Hope you enjoy this weird evolutions until the final one, haha
Alberto
-
V-REP simulation models available!
09/02/2016 at 16:22 • 0 commentsHello!
It's been a while but today I've uploaded all the simulation files I've created so far! You can simulate the robot, test different parameters and even create your own robot configurations!
Here's a video showing the simulator in action:
Thanks!
Alberto
Dtto - Explorer Modular Robot
Modular self-reconfigurable robot, focused on all-terrain search and rescue operations using bio-inspired locomotion mechanisms