 Chris
ChrisConception
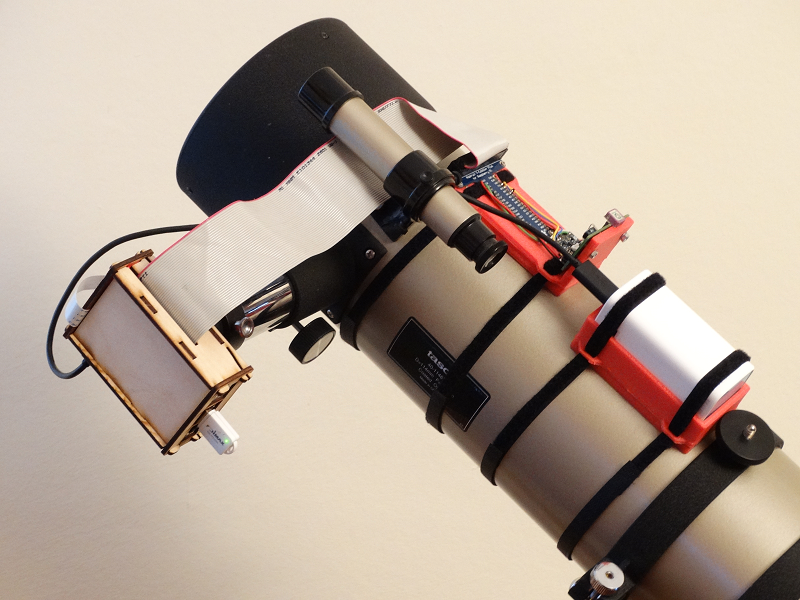
I was fortunate to be given an old telescope, At the time I'd just finished my 3D printer and needed something to print. After browsing Thigyverse I came across the PiPiece, an adapter to mount the Raspberry Pi camera to the telescope, by dmpalmer. After a little setting up I was able to view the sky at night through the Pi. I had one big problem. I had no idea what I was actually looking at.
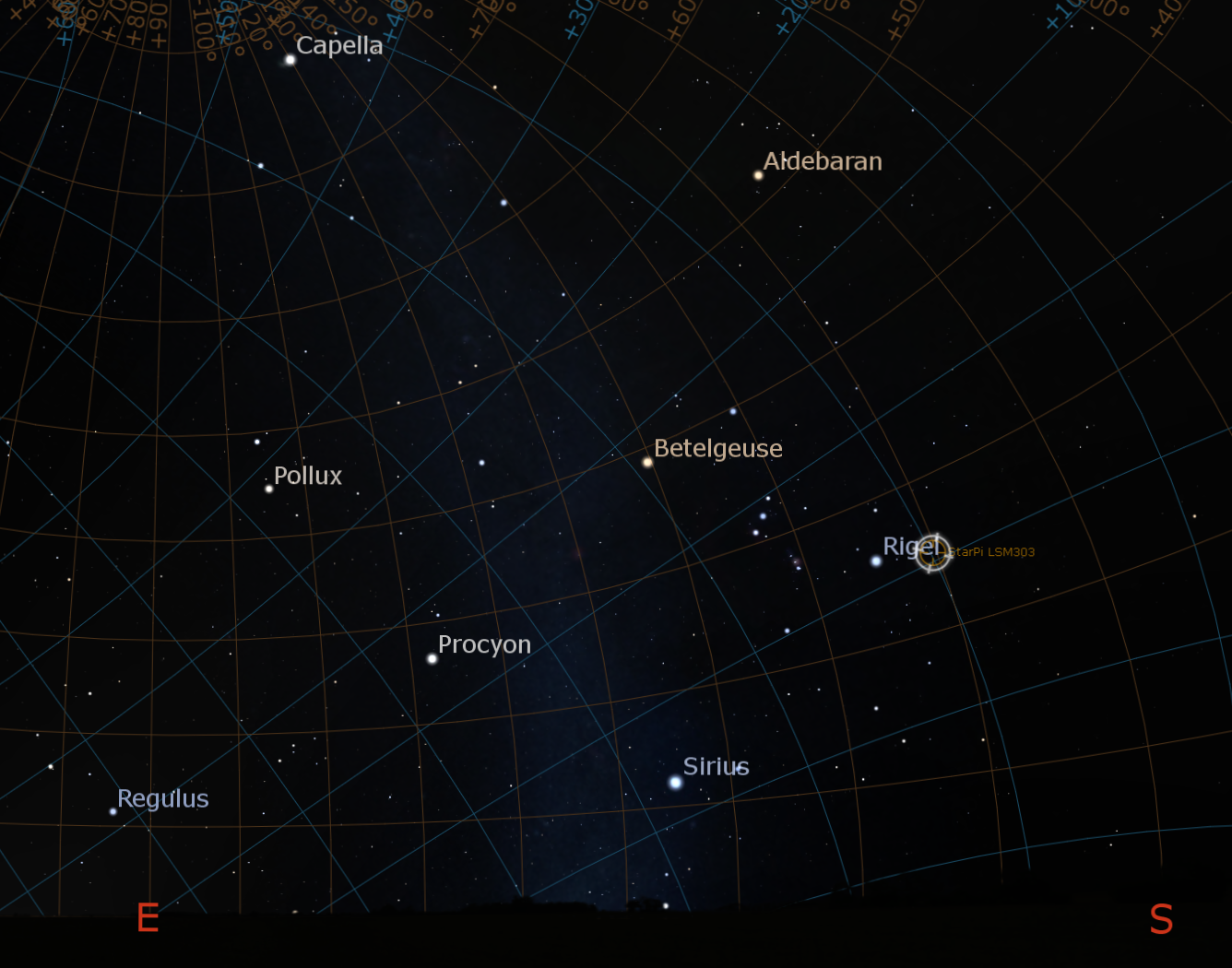
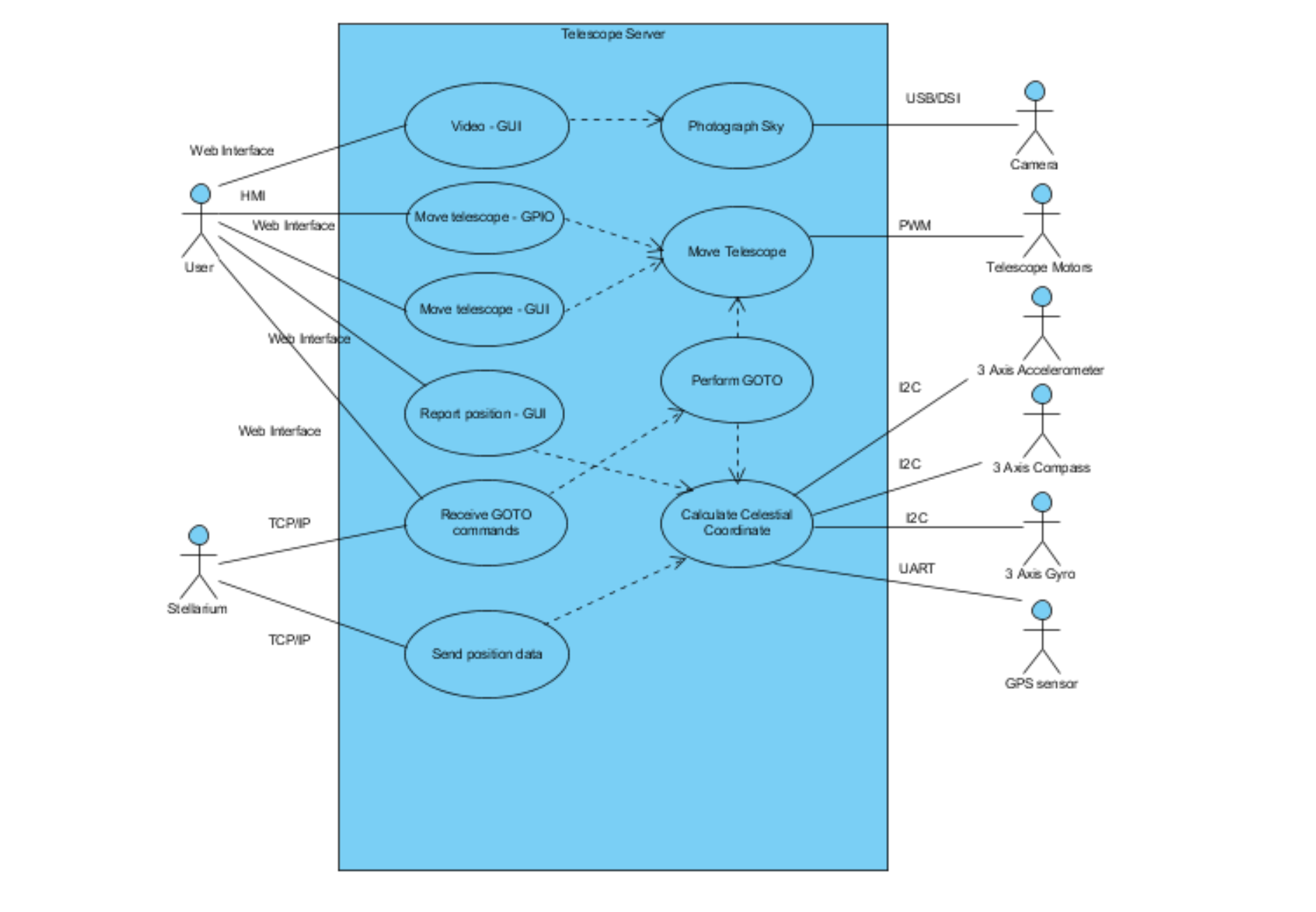
After some surfing I came across Stellarium, An open source sky map. If you don't know it and have an interest in Astronomy, check it out. It's full of features, but the one that drew my attention was the telescope control addin. This acts as a client to telescope to send Goto commands and receive co-ordinates to display the current position the telescope is looking at in the sky.
It was the solution I was looking for, but it brought with it another porblem. Cost. I looked into the price of telescope tracking systems and found it was quite easy to spend hundreds of dollars on a system. I didn't want to spend that kind of money. With using the Pi already, it seemed logical to just build one.








 Derrick
Derrick
 Paul Crouch
Paul Crouch
 Andy Piper
Andy Piper
 Mike Turvey
Mike Turvey
Is this project still ongoing? I am researching right now to do one myself.