 Stefano Filippone
Stefano FilipponeThis project is based on a Wall-e toy i bought on e-Bay )and so far has been quite challenging considering the space available inside body of is very narrow for all the electronics i wanted to stuff in it.
Another reason that make this project difficult is the fact that I didn't want to ruin the aspect of my Wall-e, that mean i didn't like to see any drilling visible from the outside, nor horrible pieces of plastic glued on the body.

The first choice I had to make was the selection of the servos - and after some research I decided to try the Robotis XL-320 which I already saw in action on the Darwin Mini Robot. Have a look and at the GanGamStyle Dance
The big advantages of these servo is the compact size, the ability to chain them, light weight, smooth movement and the ability to talk with them using half-duplex protocol.
Of course there'r also some limitations which is the quite limited amount of torque that these servos can bear. I've 3D printed all servo supports and gears using my brand new FlashFord Creator PRO.
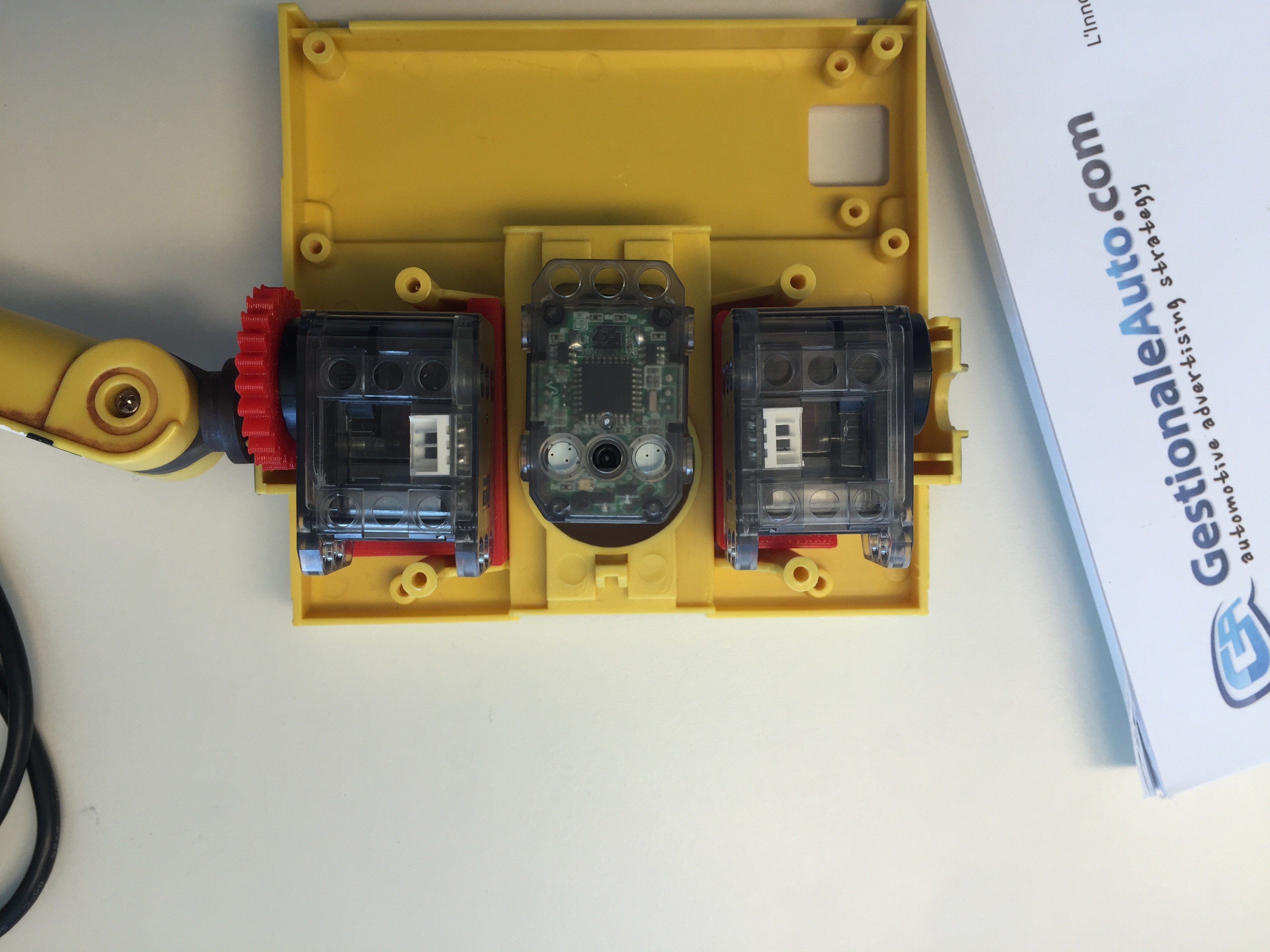
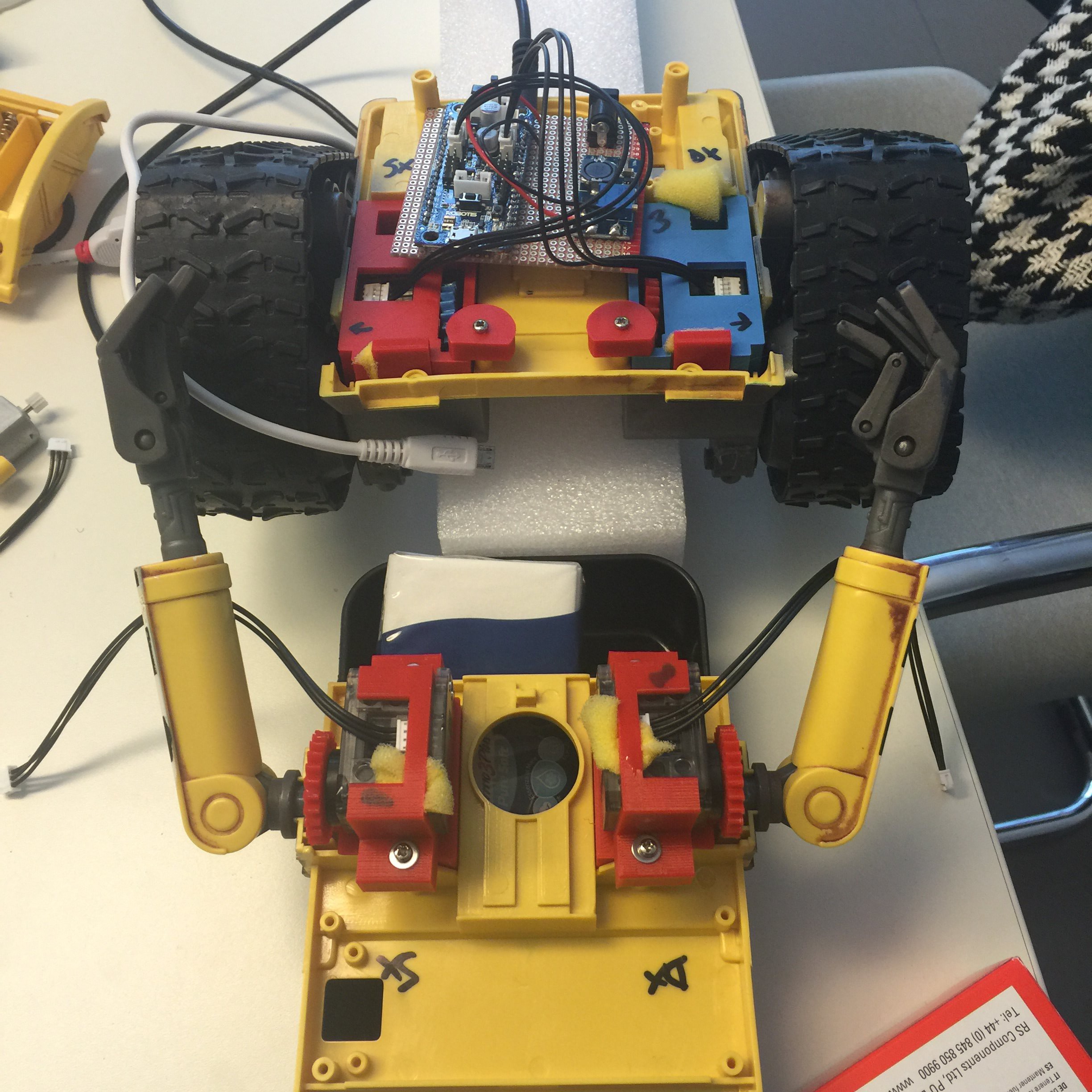
The first problem to solve was the lay out all the 5 servo inside Wall-e to allow movement of wheels, arms and head. Again - no horrible drilling allowed. I am almost satisfied with the result i obtained and that you can see on the following pictures
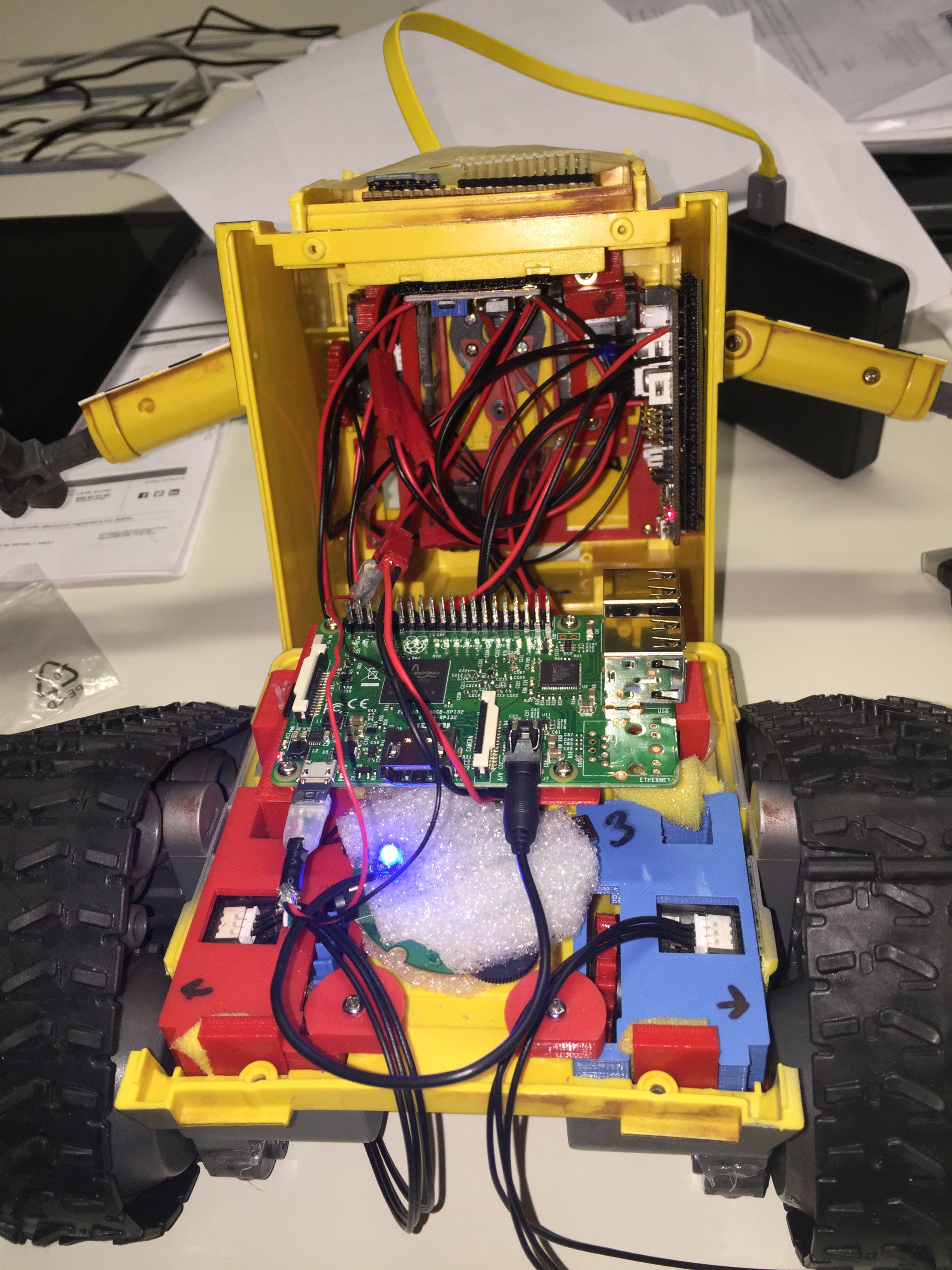
 After i placed all the servos inside the body i had to find the space for the following electronics
After i placed all the servos inside the body i had to find the space for the following electronics
- Audio board
- OpenCM 9.04 (servo controller)
- Step-up from 5V to 7.4V (servo needed 7.4V)
- Raspberry Pi3
This is the inside of my Wall-e with all the electronics inside (but still missing , HDMI cable, Camera flexcable, Sonar wiring)
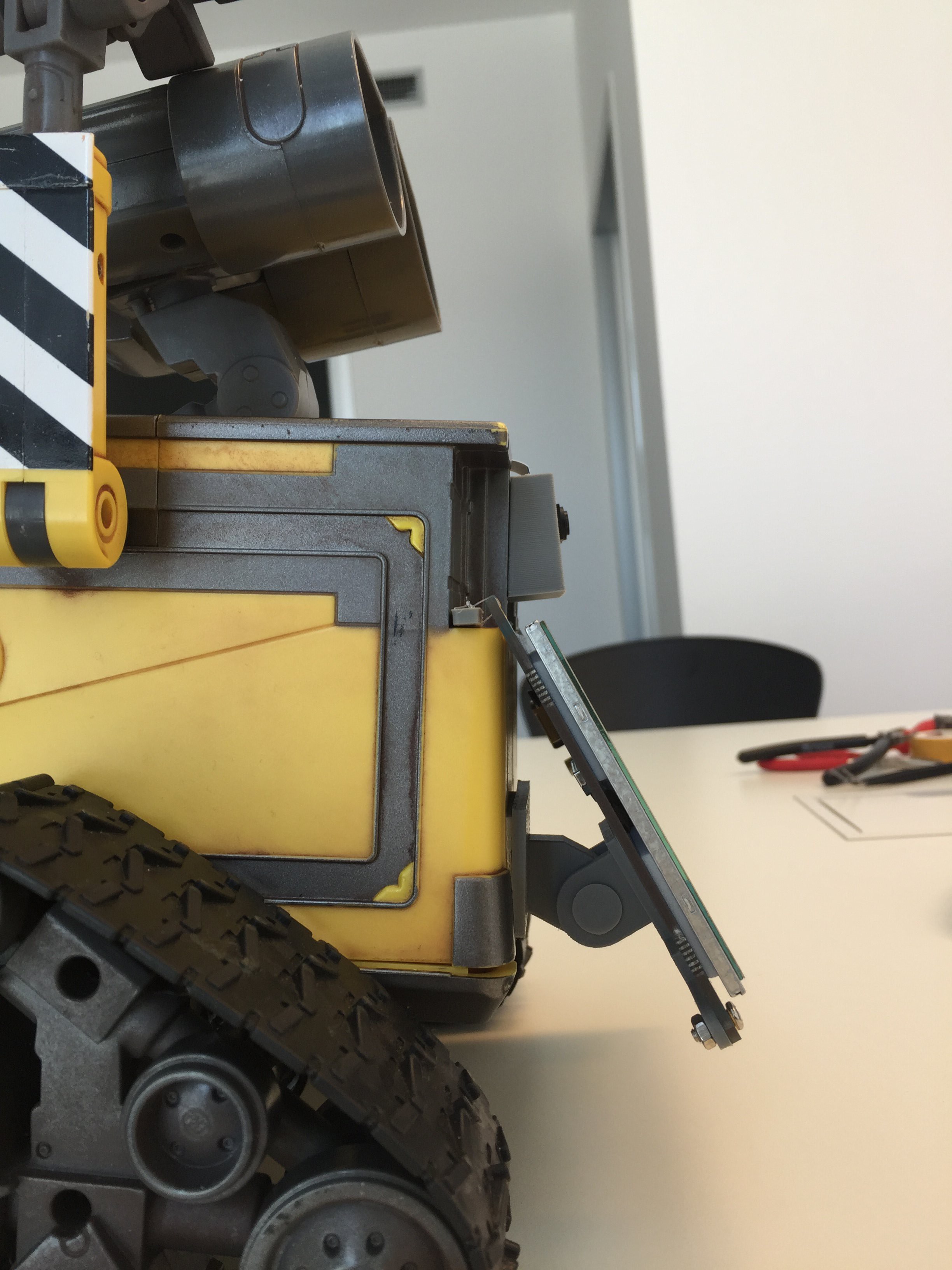
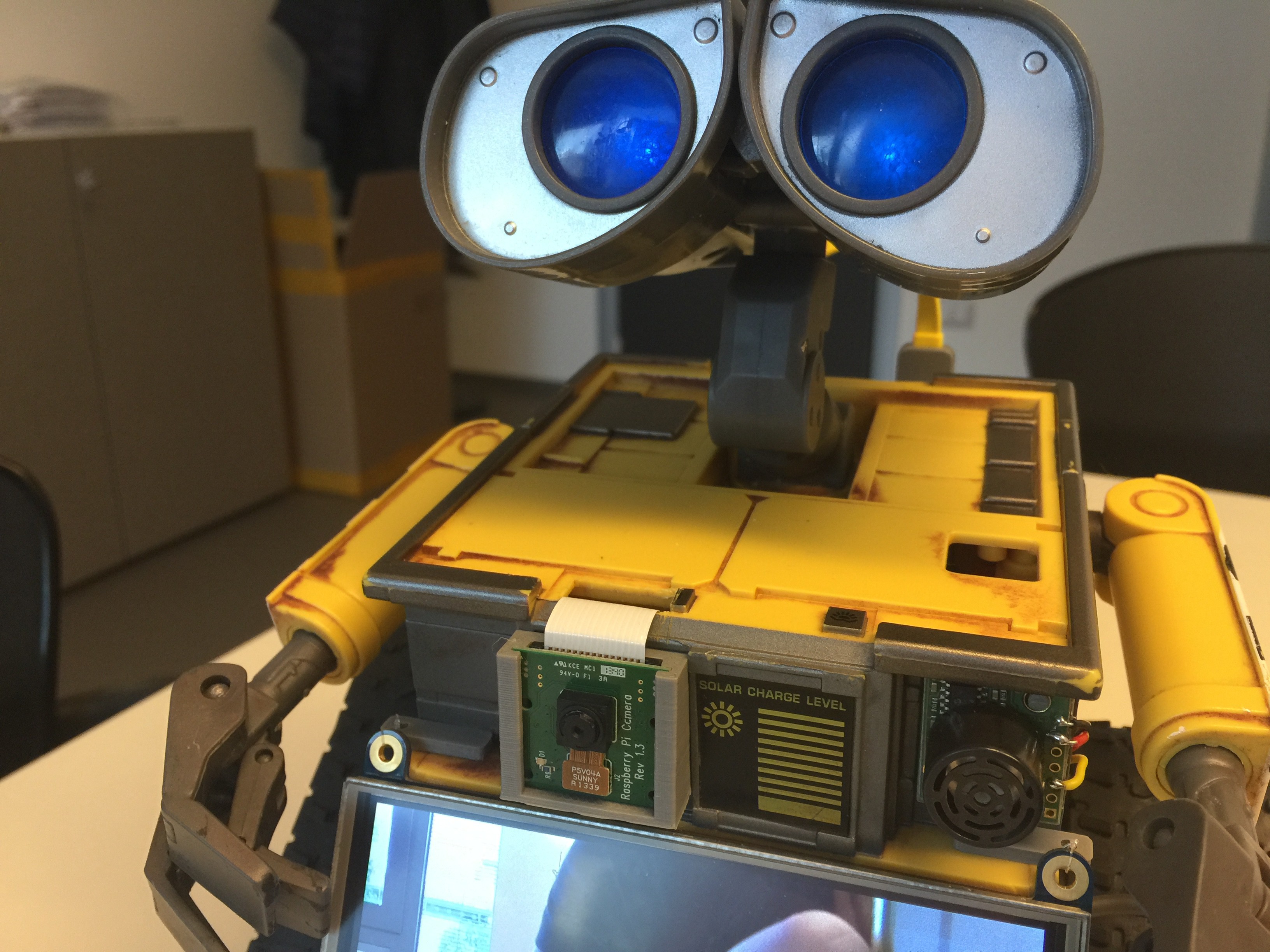
The last challenge was the wiring of HDMI display in front of the Robot together with a PiCamera. I used a 5" HDMI touch by Adafruit and I 3D printed the display supports using the gray color that was already present on some other parts of the body of Wall-e
 PiCamera and Sonar have been placed on top of the display. I saw that other hackers put the camera inside Wall-E eyes but I didn't like the estetics of the final results, because i wanted to keep the light on both eyes
PiCamera and Sonar have been placed on top of the display. I saw that other hackers put the camera inside Wall-E eyes but I didn't like the estetics of the final results, because i wanted to keep the light on both eyes
Wall-e is currently back-packed with a 9000mAh battery which supplies enough power for 5 hours with all the devices on (please notice the nice yellow ribbon cable :) I will reprint the battery support soon - this is just a prototype.

Some little effort was needed to put in place the HDMI (and the USB power) cable inside of the body (it was hard to find a slim flexible cable). Moreover i had to place everything in a way that wouldn't interfere with the servo moments

https://www.dropbox.com/s/f5gsg99rhfkxojz/IMG_3073.m4v?dl=0
I am currently working on the Terminator functionalities that i will upload very soon.....

 Coders Cafe
Coders Cafe
 Morning.Star
Morning.Star
 Tim Wilkinson
Tim Wilkinson
 Mike Rigsby
Mike Rigsby