 Adam Smallcomb
Adam SmallcombThe main part of this project is a design for an easy to build electromagnet that can be easily positioned to interact with magnets or other coils to allow for interactive learning and understanding of the relationship between electricity and magnetism.
Supplemental to this is to provide reference designs for building different devices such as motors, solenoids or speakers.
Additionally this project aims to provide Arduino code and an accompanying chrome extension to provide interaction with the devices in the reference designs.
All of the code and designs are on GitHub and fully open source, I would love to see the collection of devices with support grow.
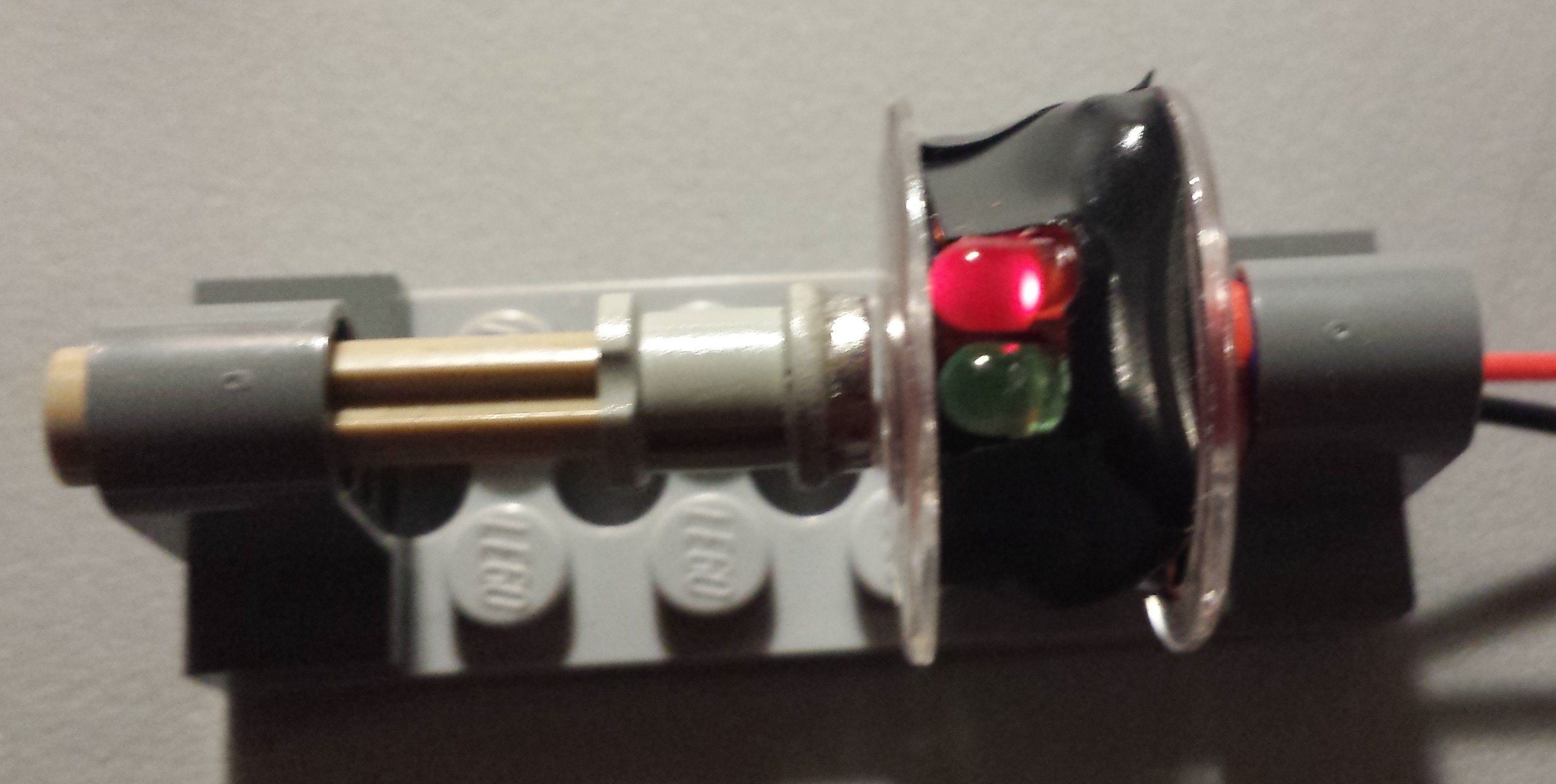
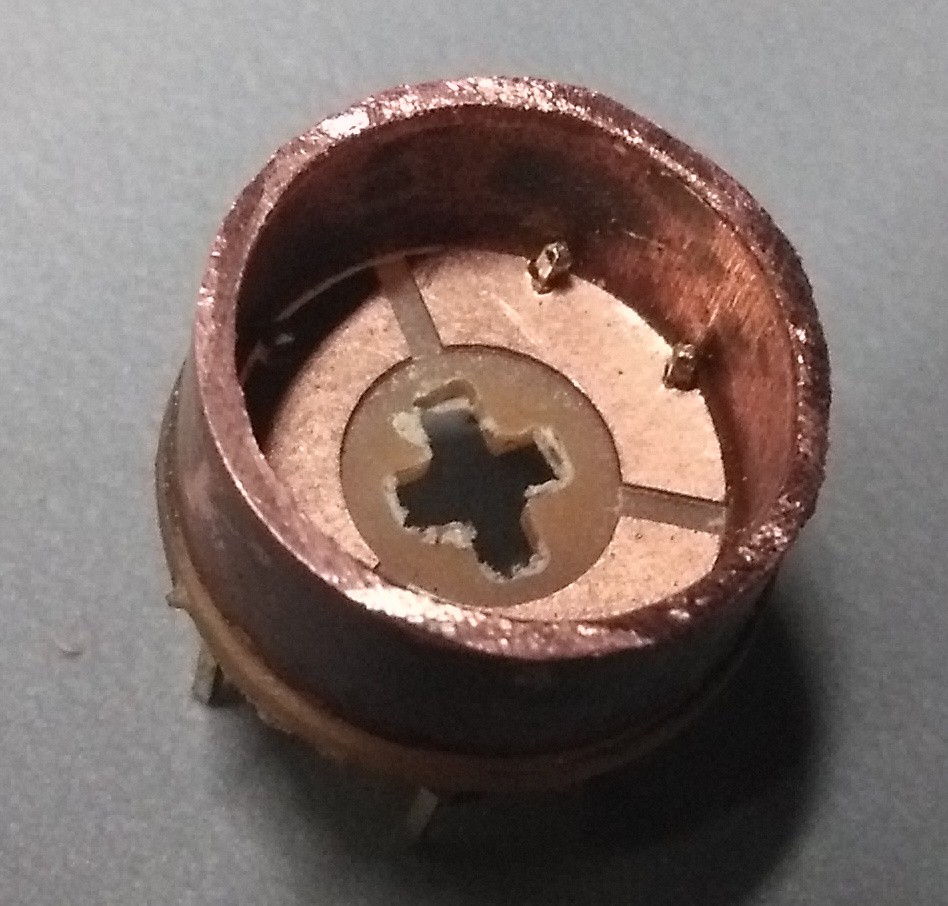
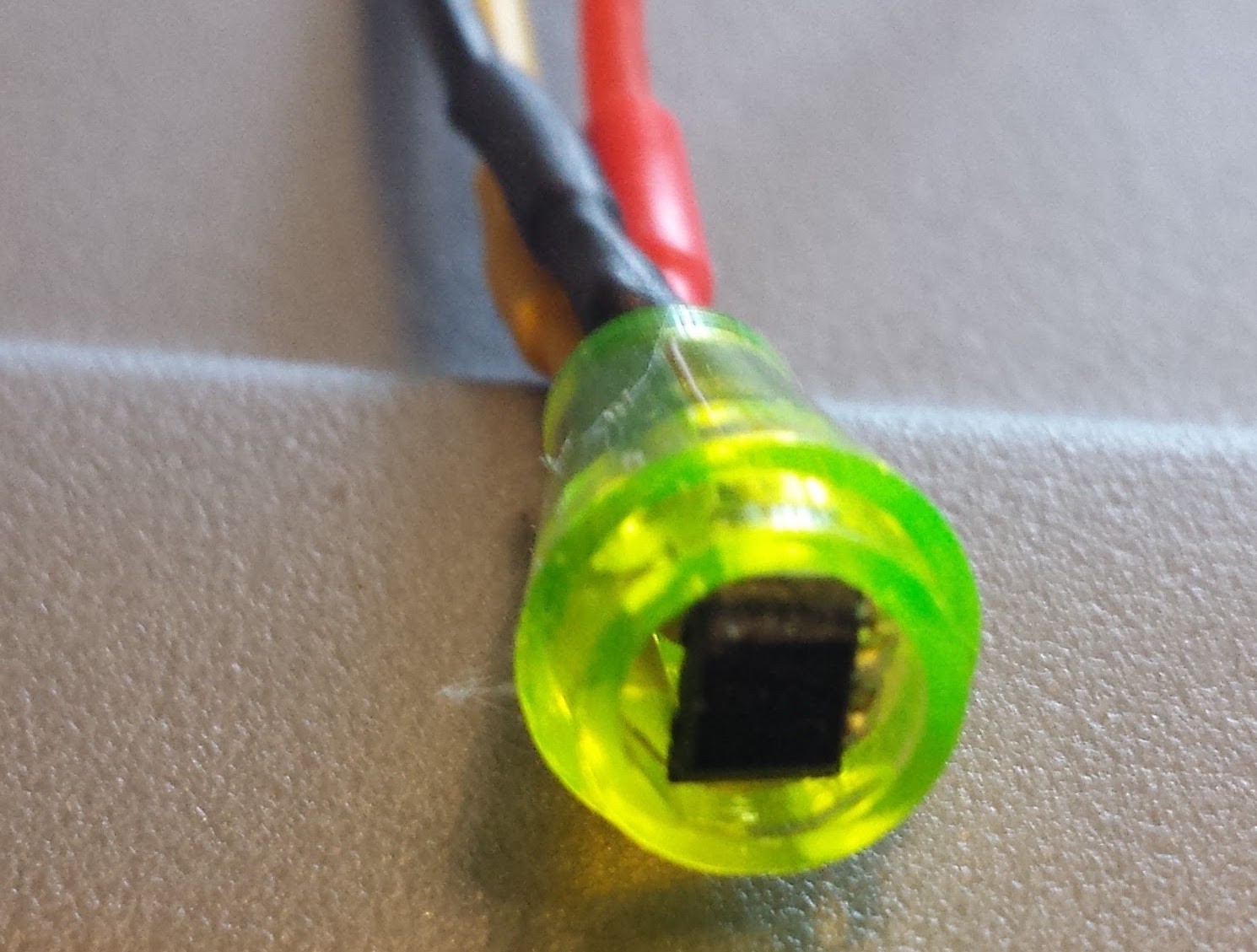
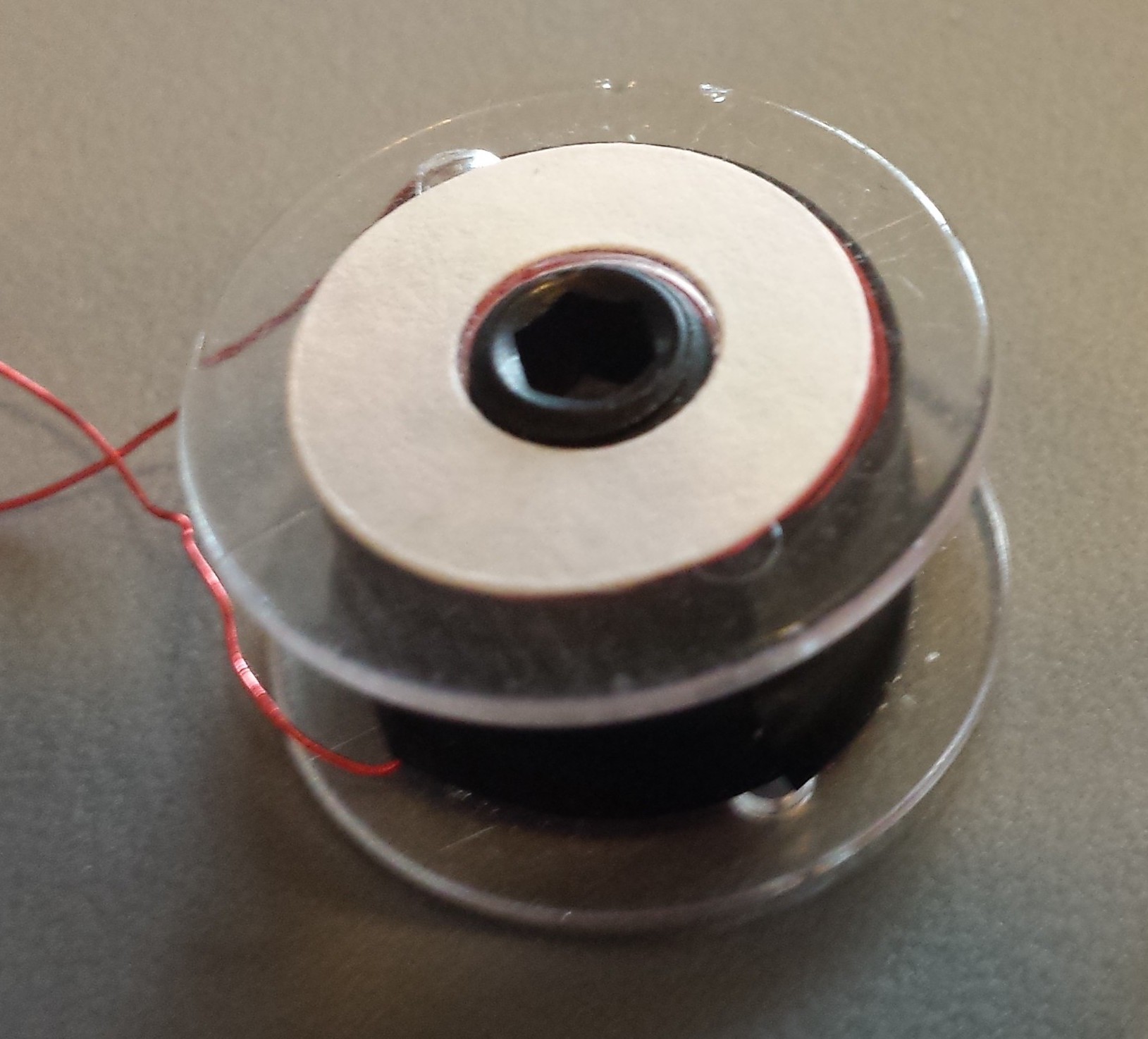
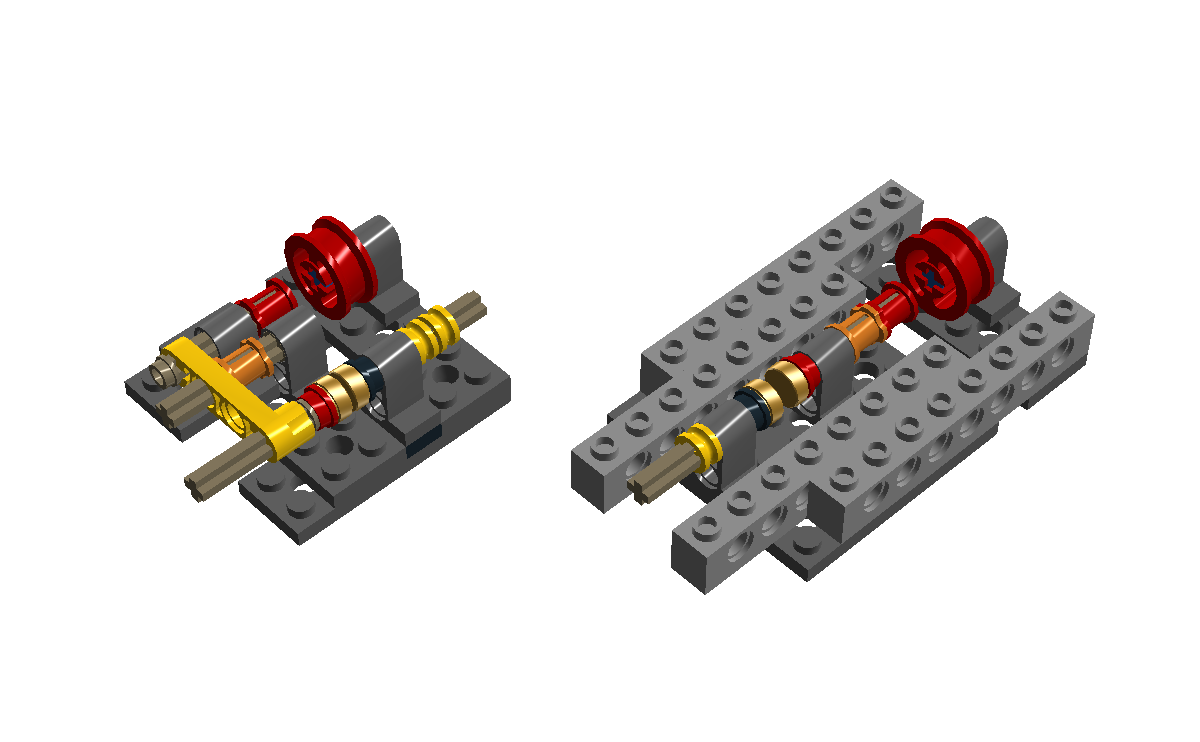
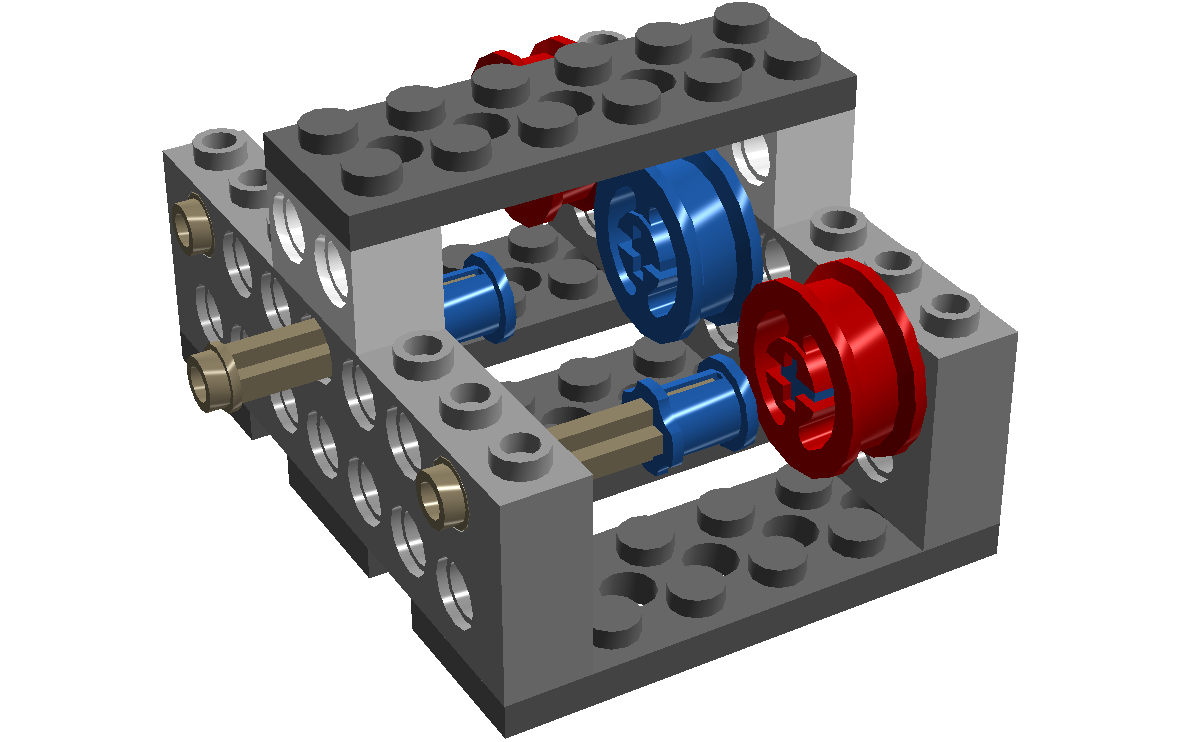
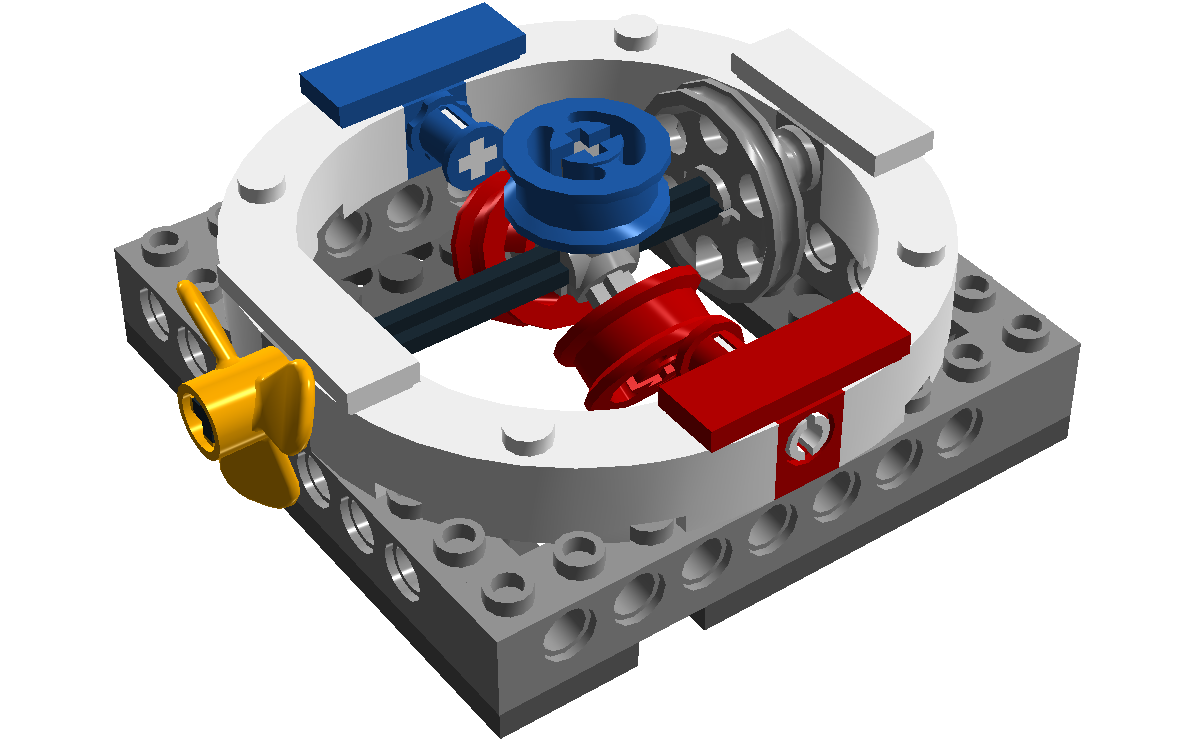
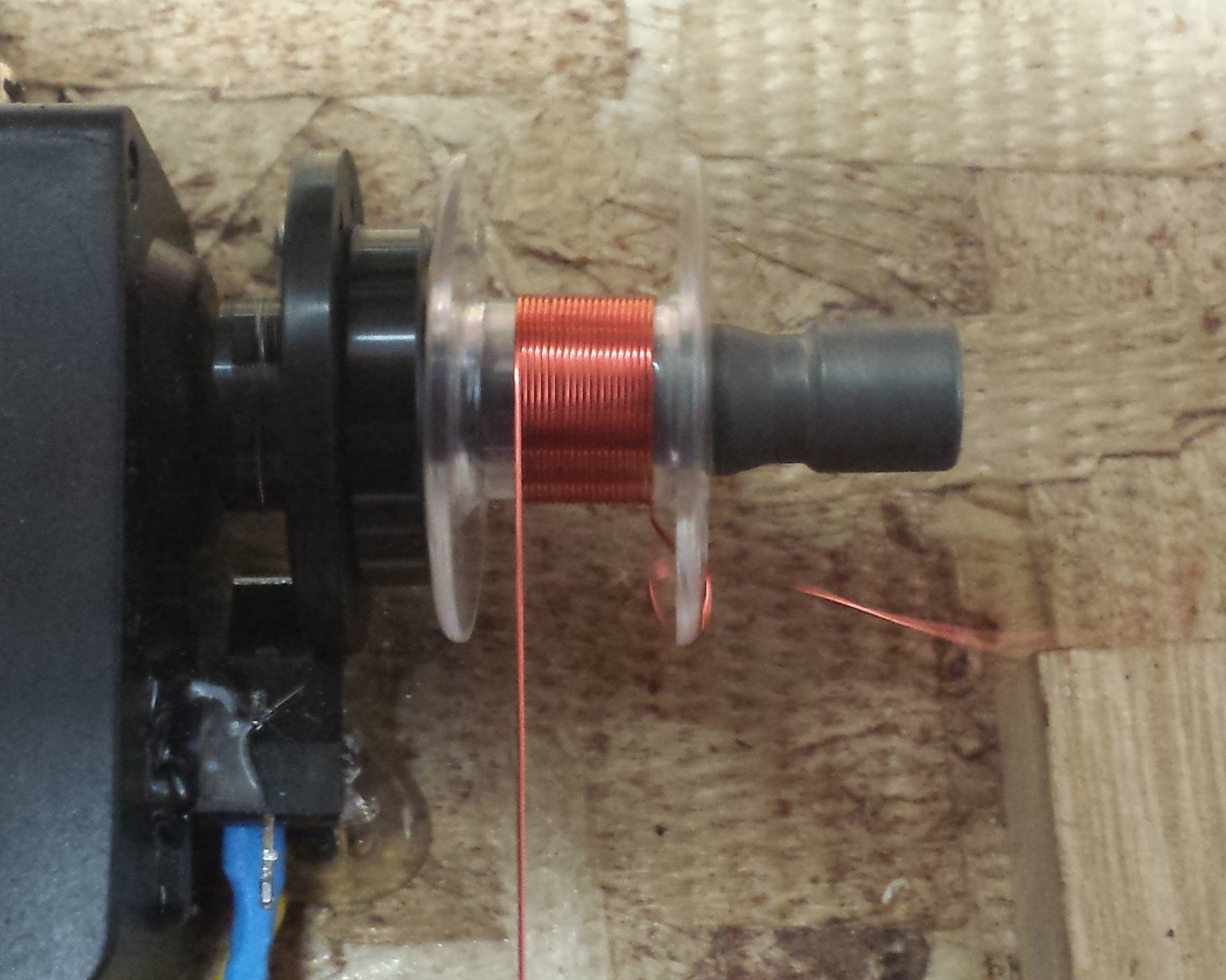
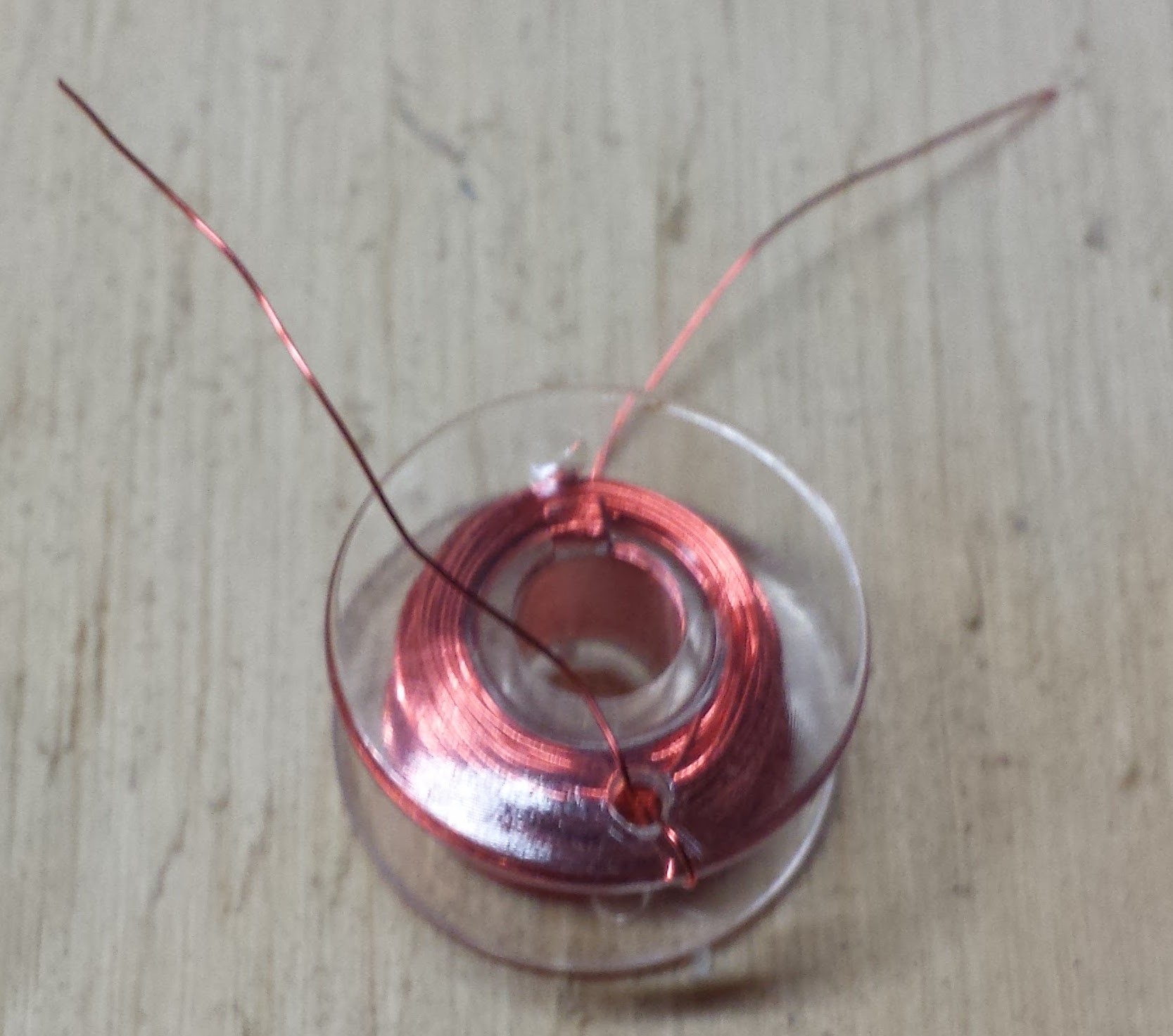
For the coils there are two types to help with wiring up some of the more complicated ones as well as to learn the roll that the direction the coils are wrapped play. I am calling these normally north and normally south, basically if you connect the black wire to ground the front of the coil with the sticker on it will have that polarity. The north type has a red wire as the other wire and a red bush in the center, the south coil ideally has a blue wire and a blue bush but for me currently I have had to use a white wire and gray bush. Additionally for both types the red LED indicates the front side is energized as north and the back as south, and the other LED again ideally a blue one but for me has been green would indicate a south pole. The magnets likewise are mounted such that on a red bushing the magnet facing out is north and on the other color is facing south.
`
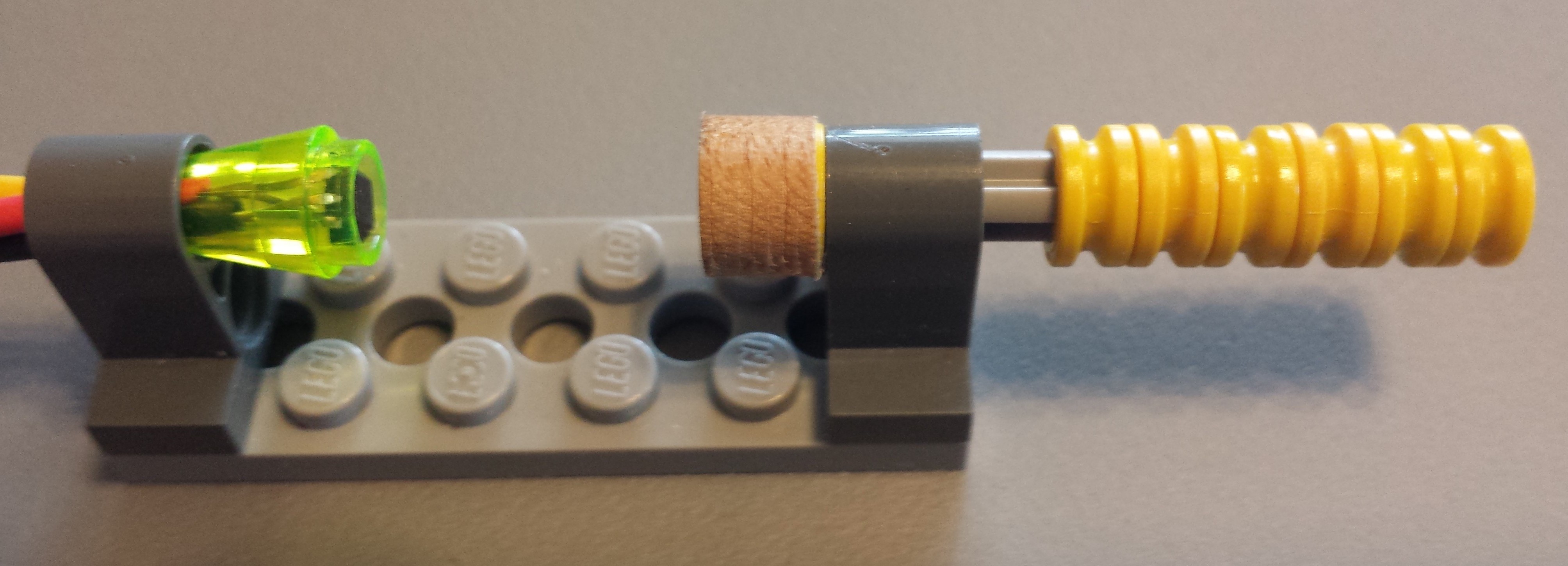
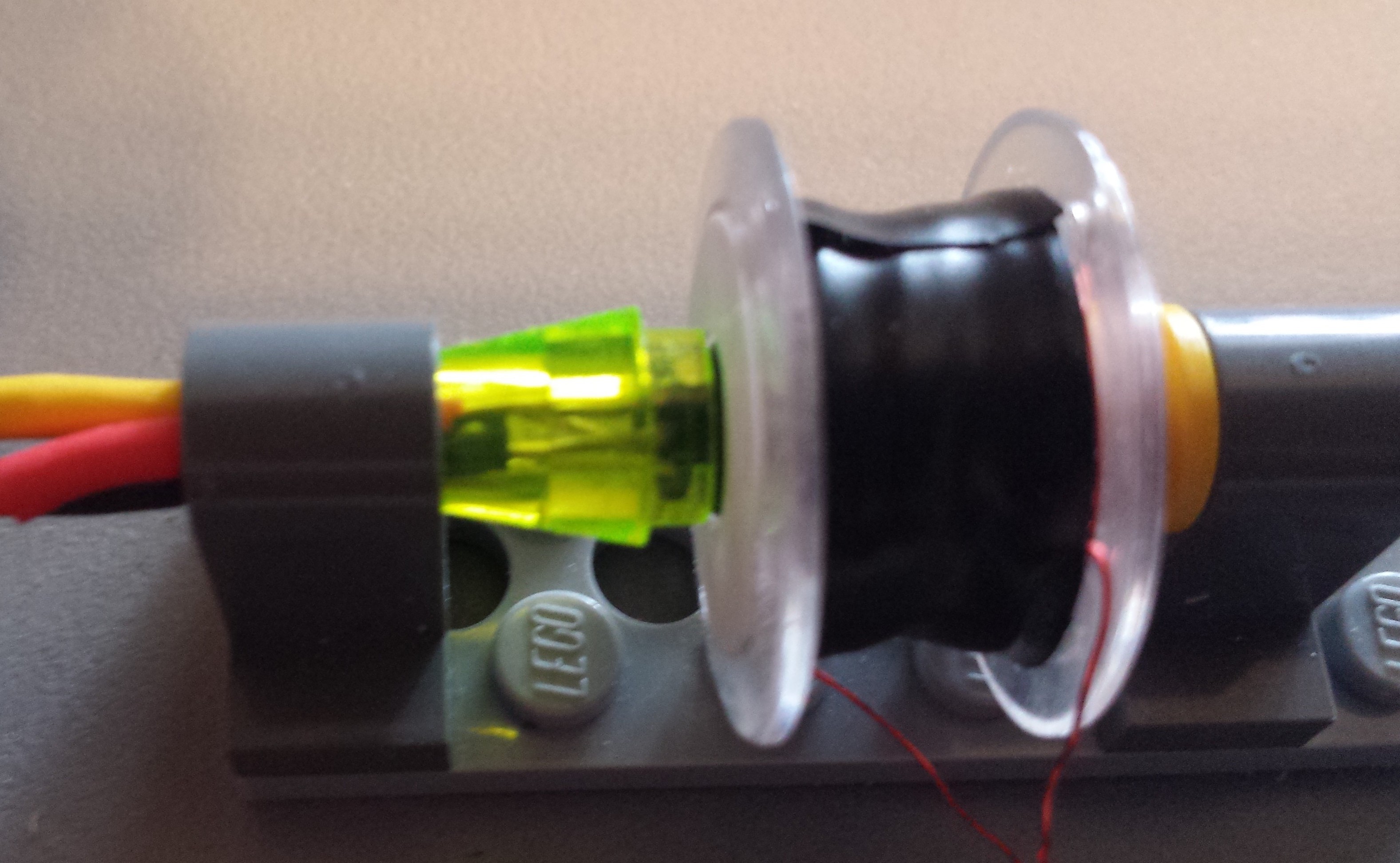
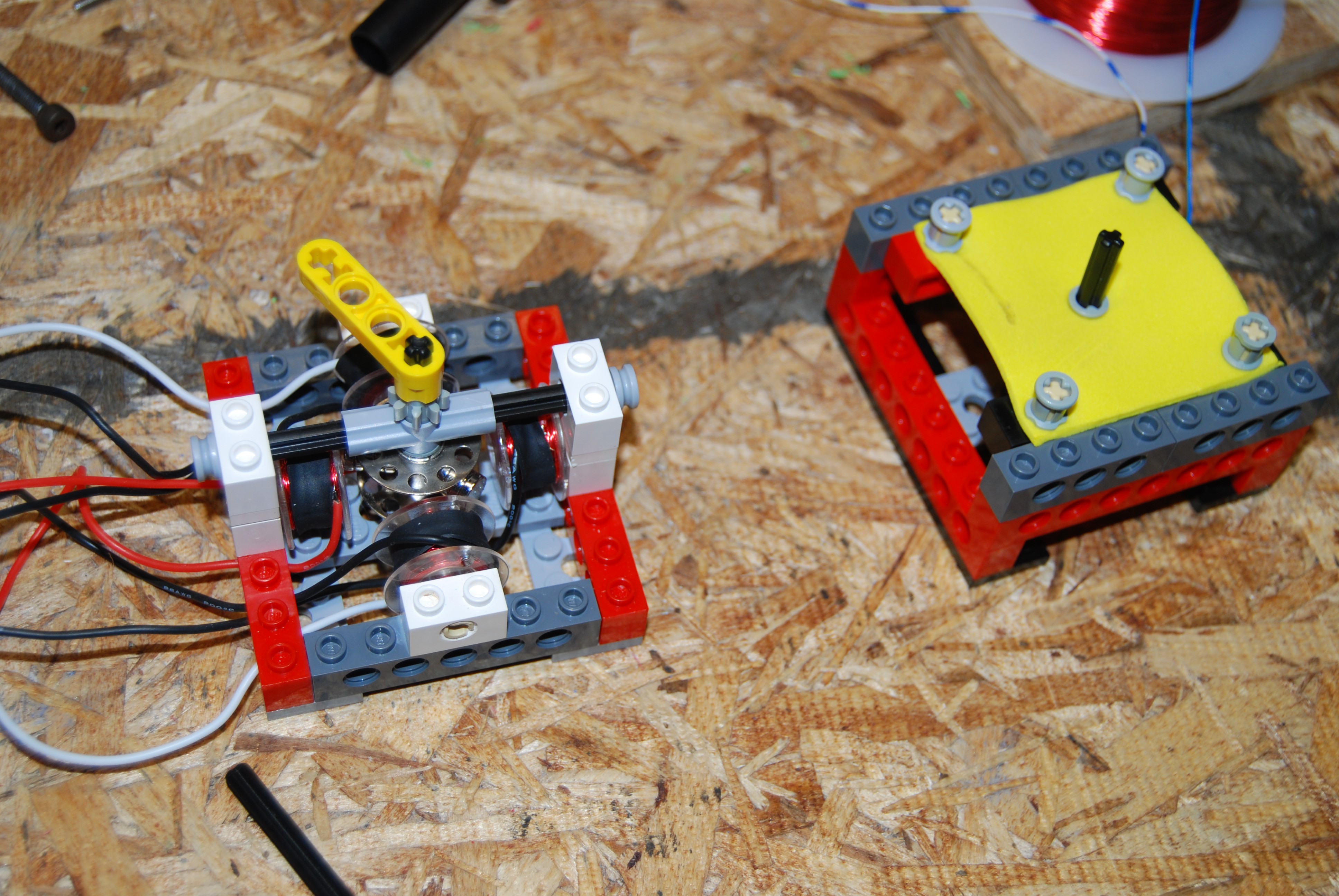
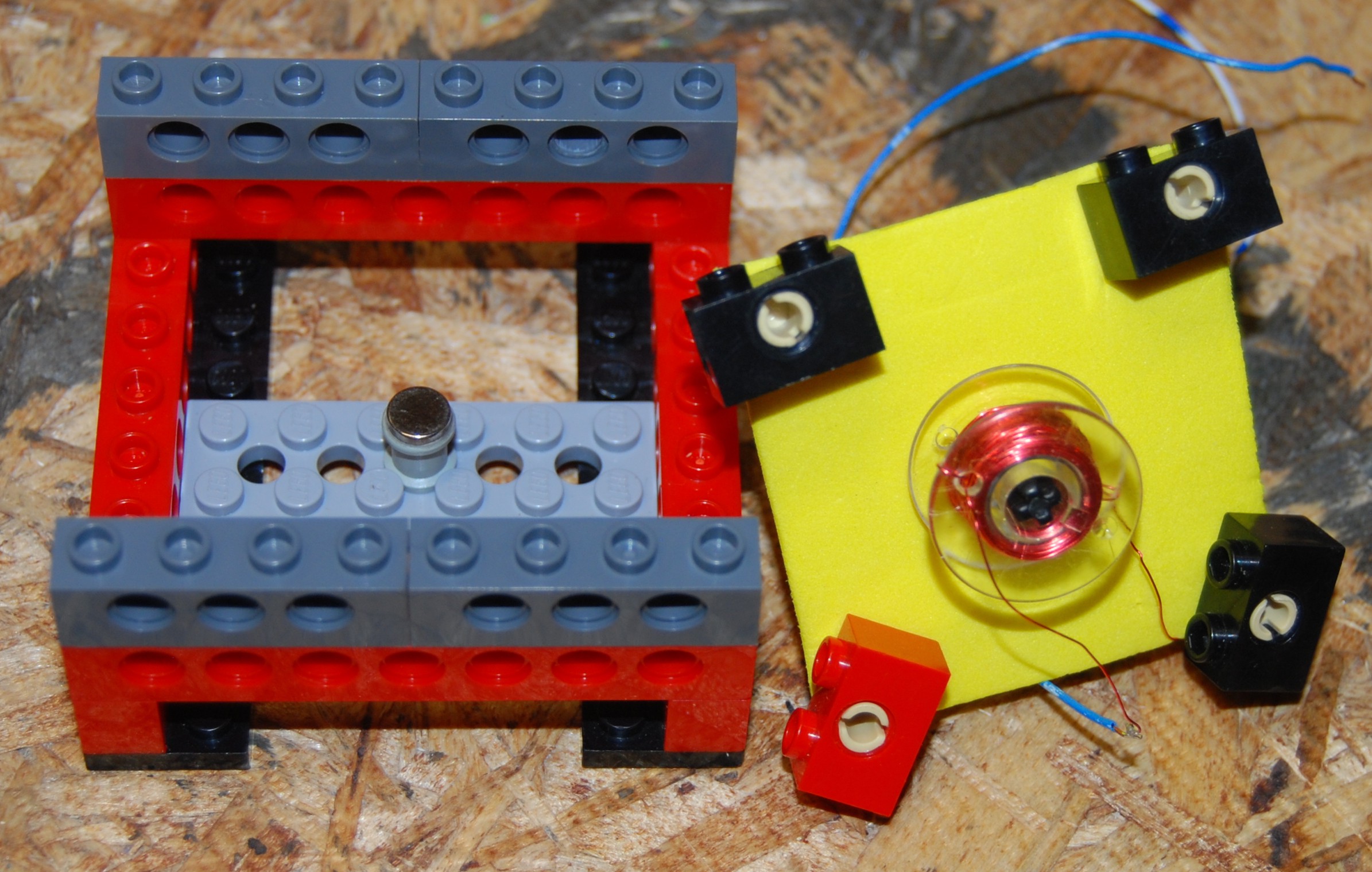
So as you can see here a normally north magnet powered with 5v on the red wire and ground on the black lights with a red indicator and pulls the south facing bushing toward it.
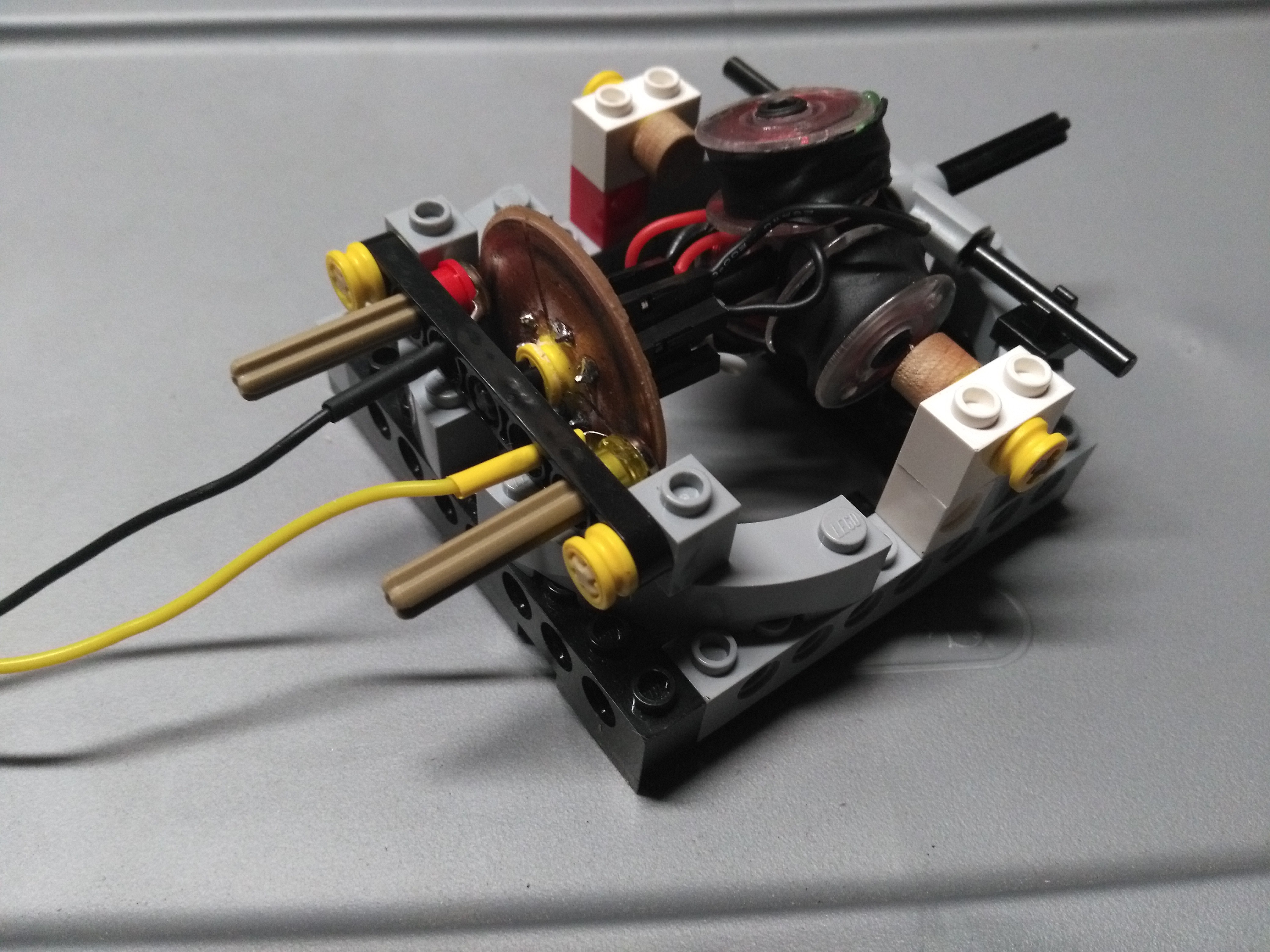
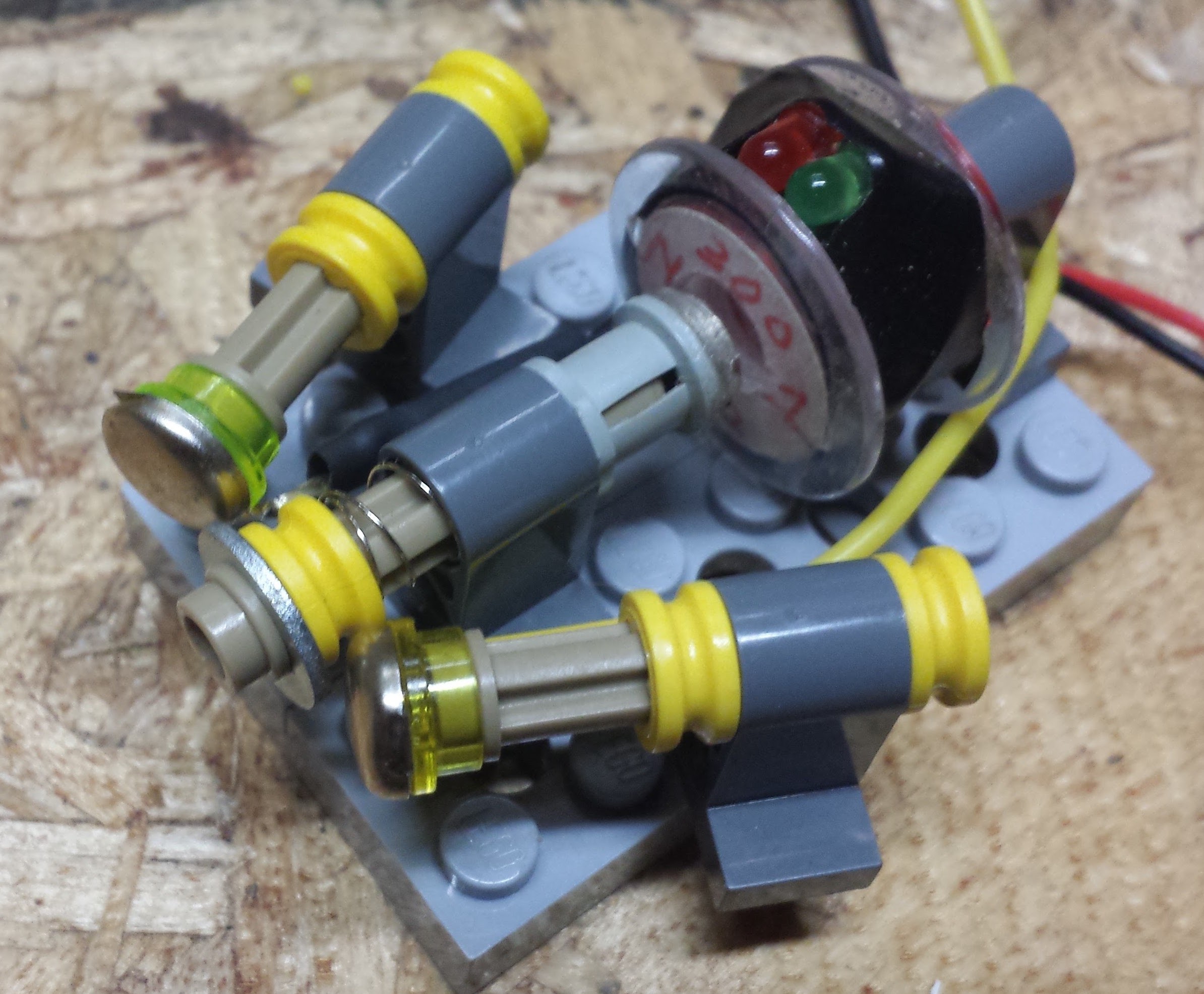
and the opposite can be seen here

You can see the build instructions for more details on how to make them.
The end goal with this is to have a kit with 2 of each kinds of coil, 3 of one kind of magnet and then one of the other type, along with a collection of Lego that allows you to build the reference designs as well as encourage free play.









 Sam Baker
Sam Baker
 Colin Kingsbury
Colin Kingsbury
 Giovanni Leal
Giovanni Leal
 Joseph Marlin
Joseph Marlin