 Kevin Kadooka
Kevin KadookaTentative Specifications:
| Type | Scanner Camera |
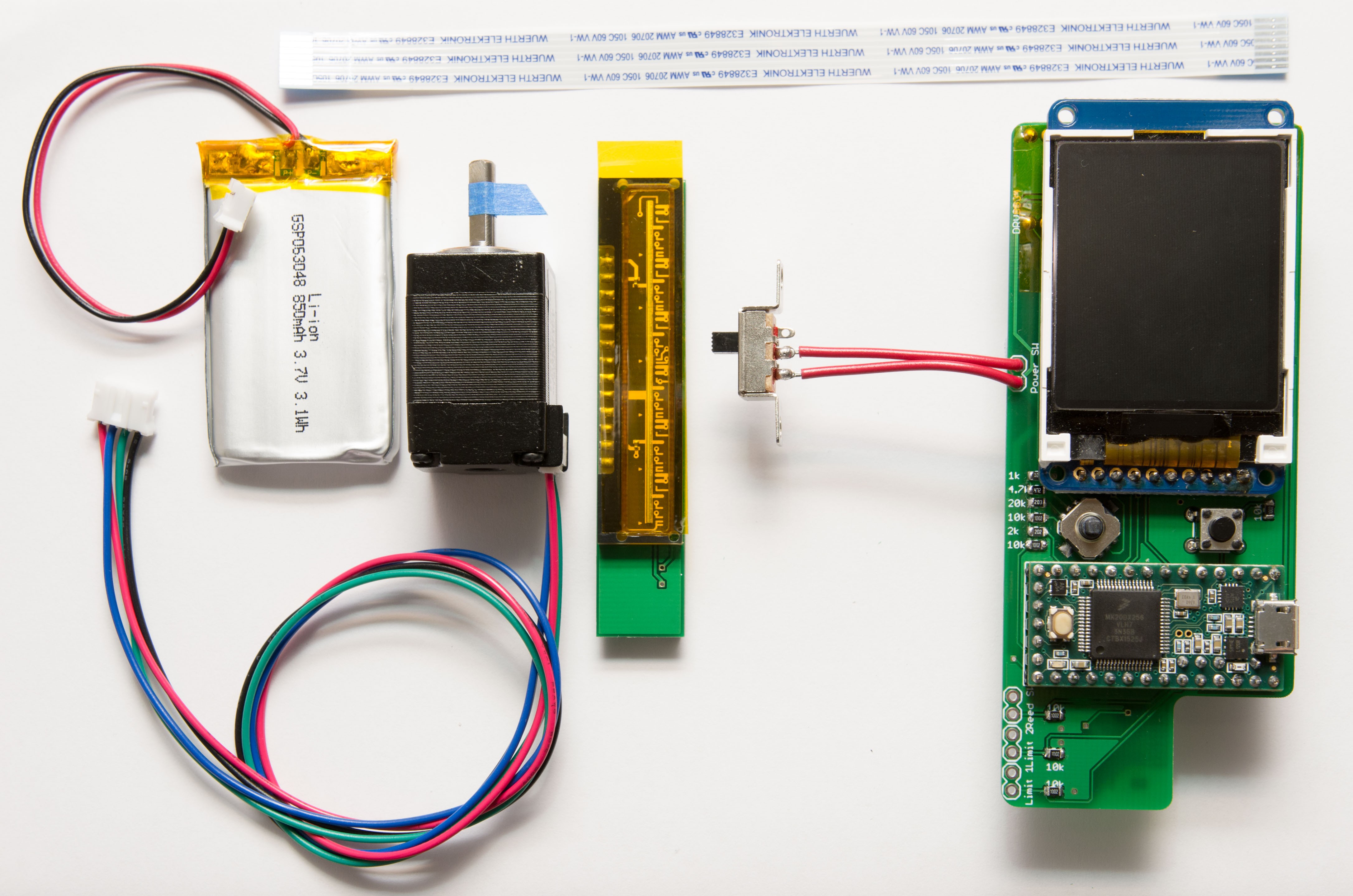
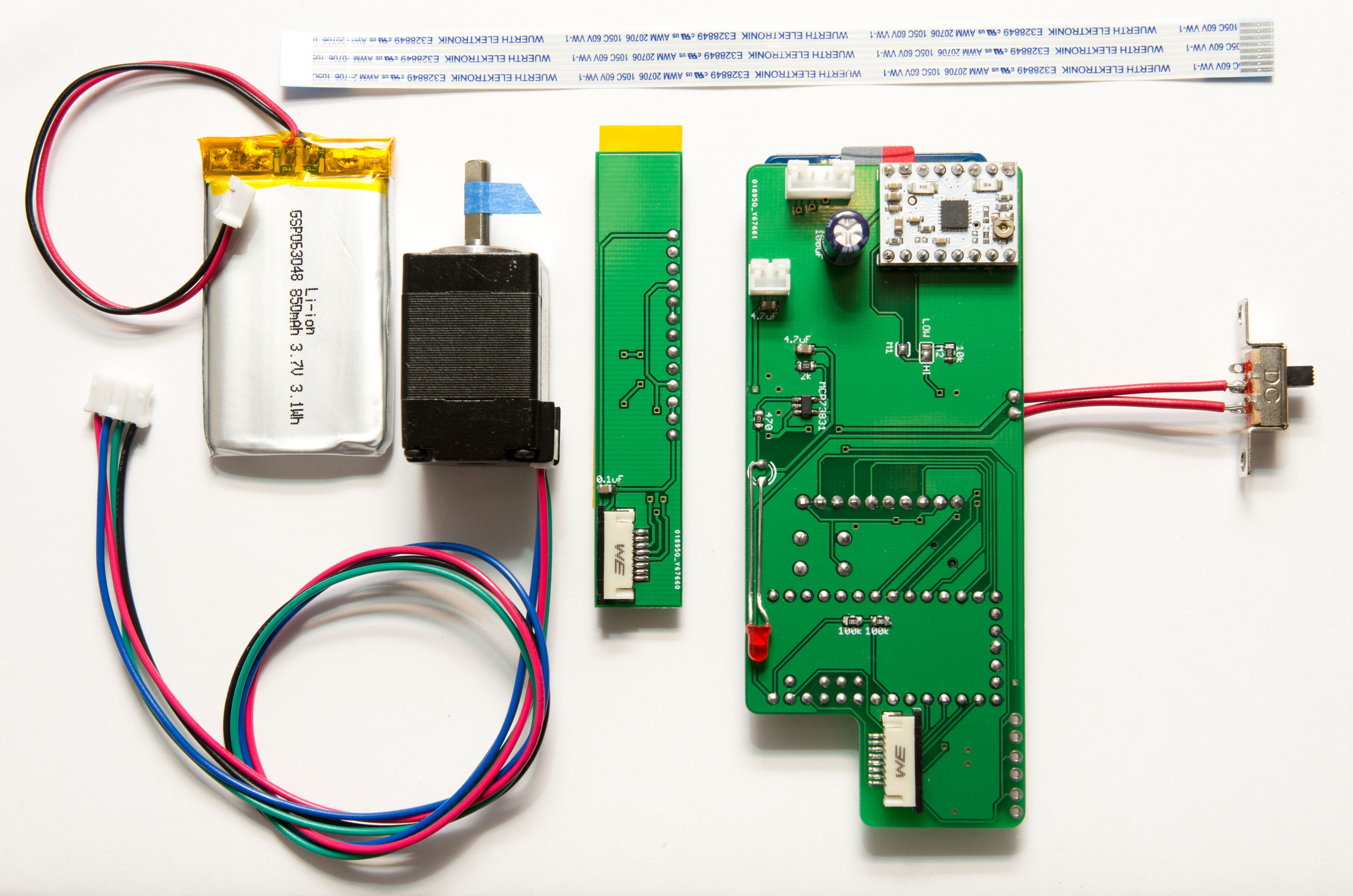
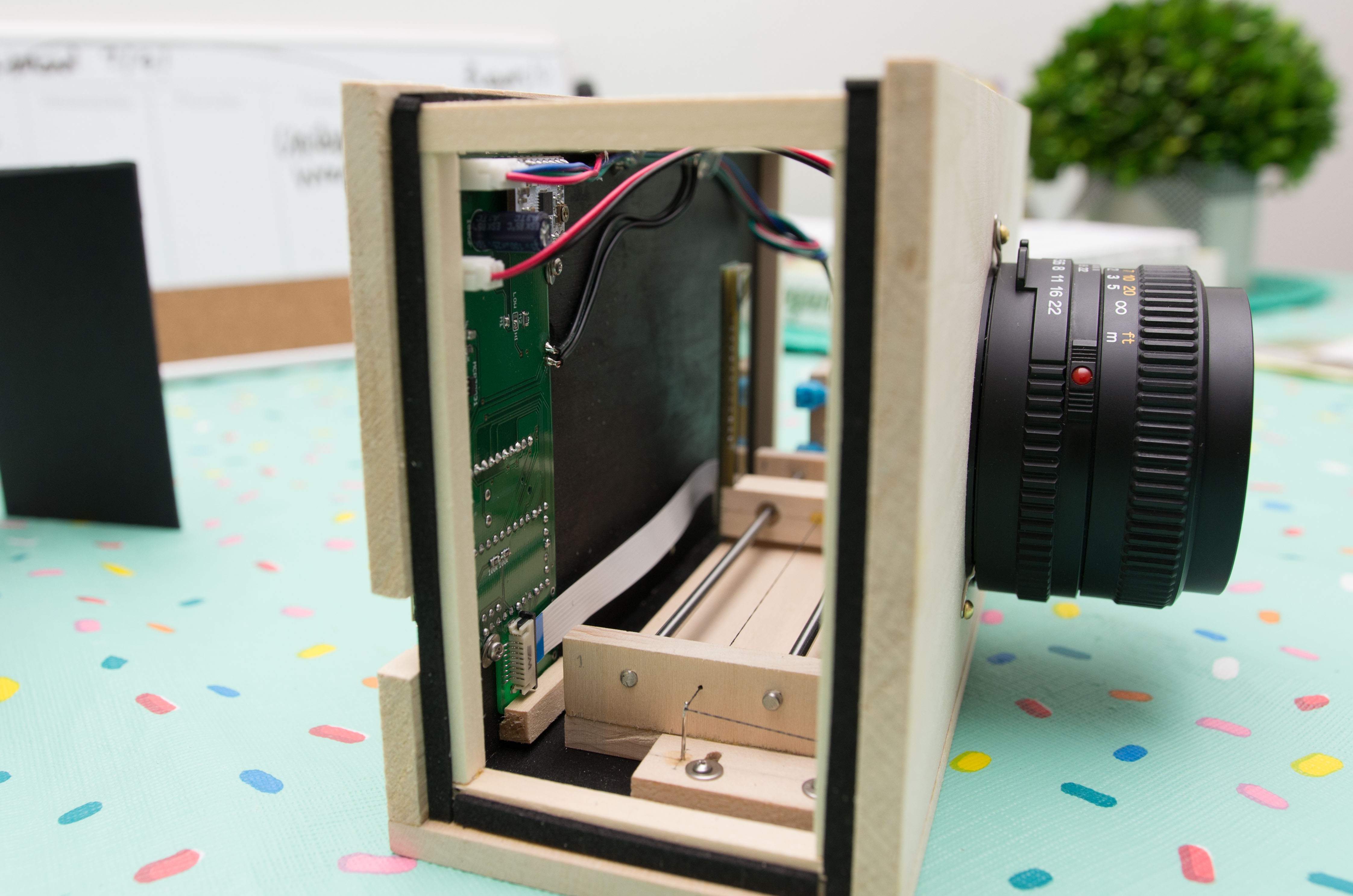
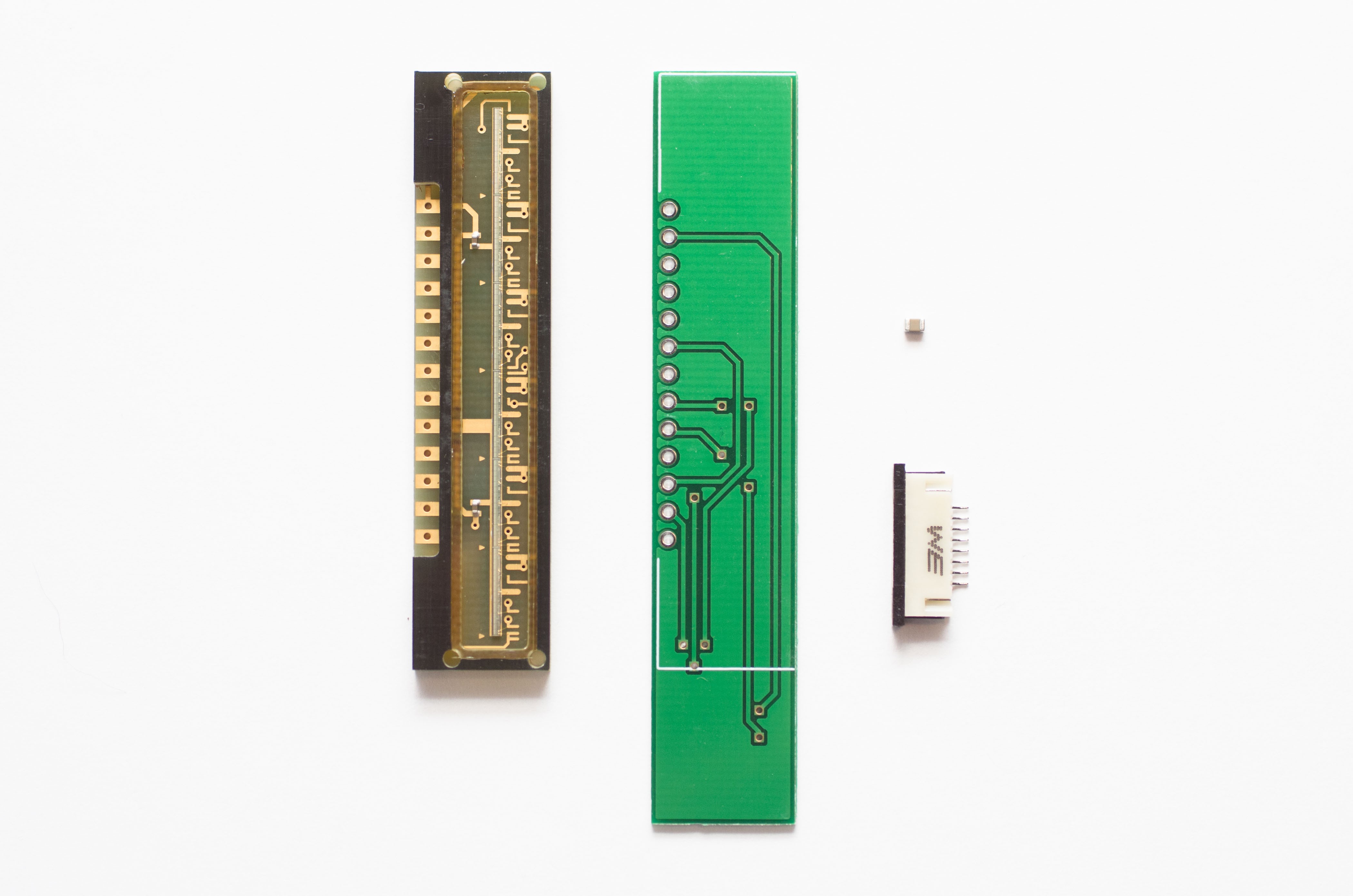
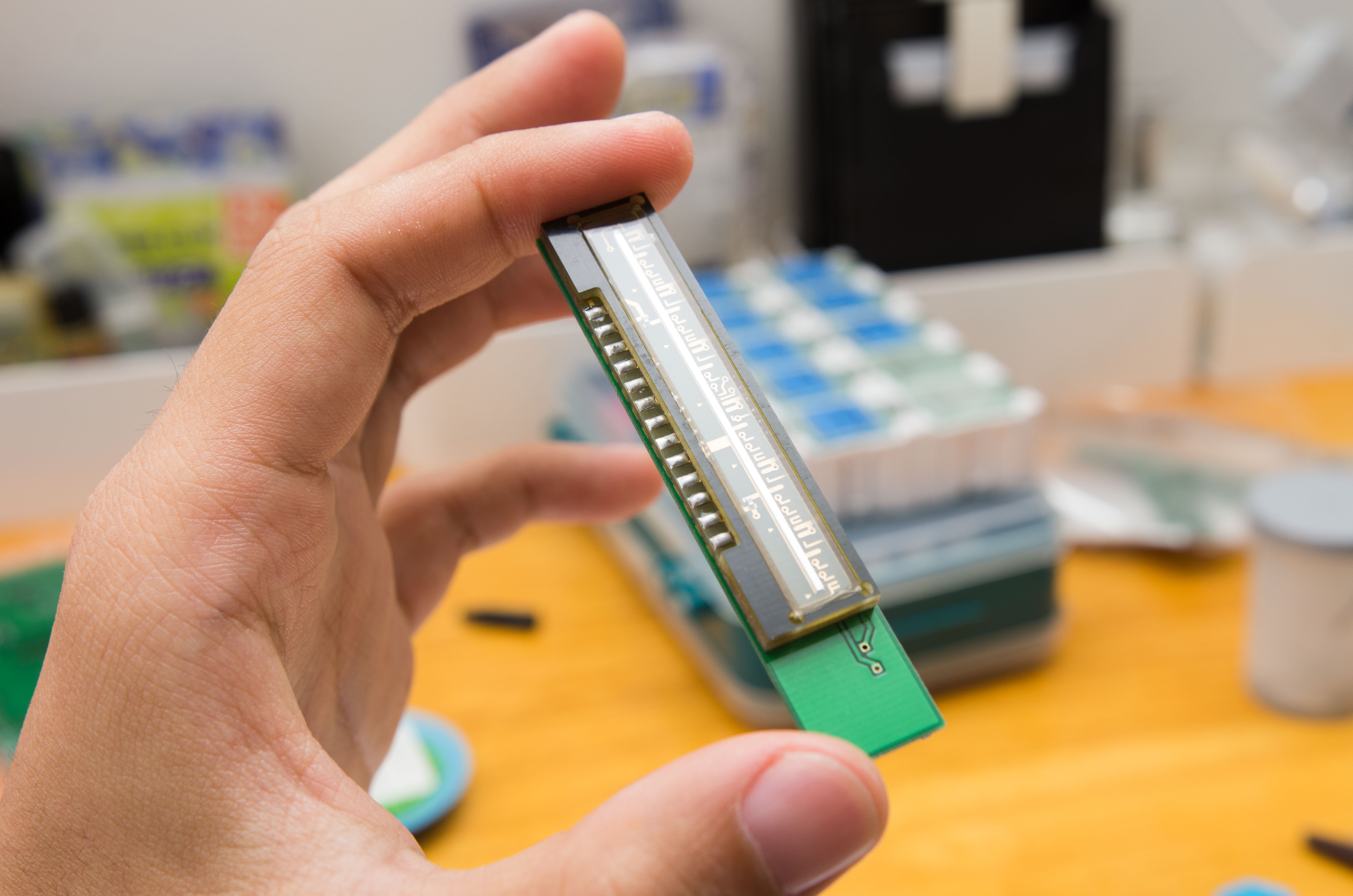
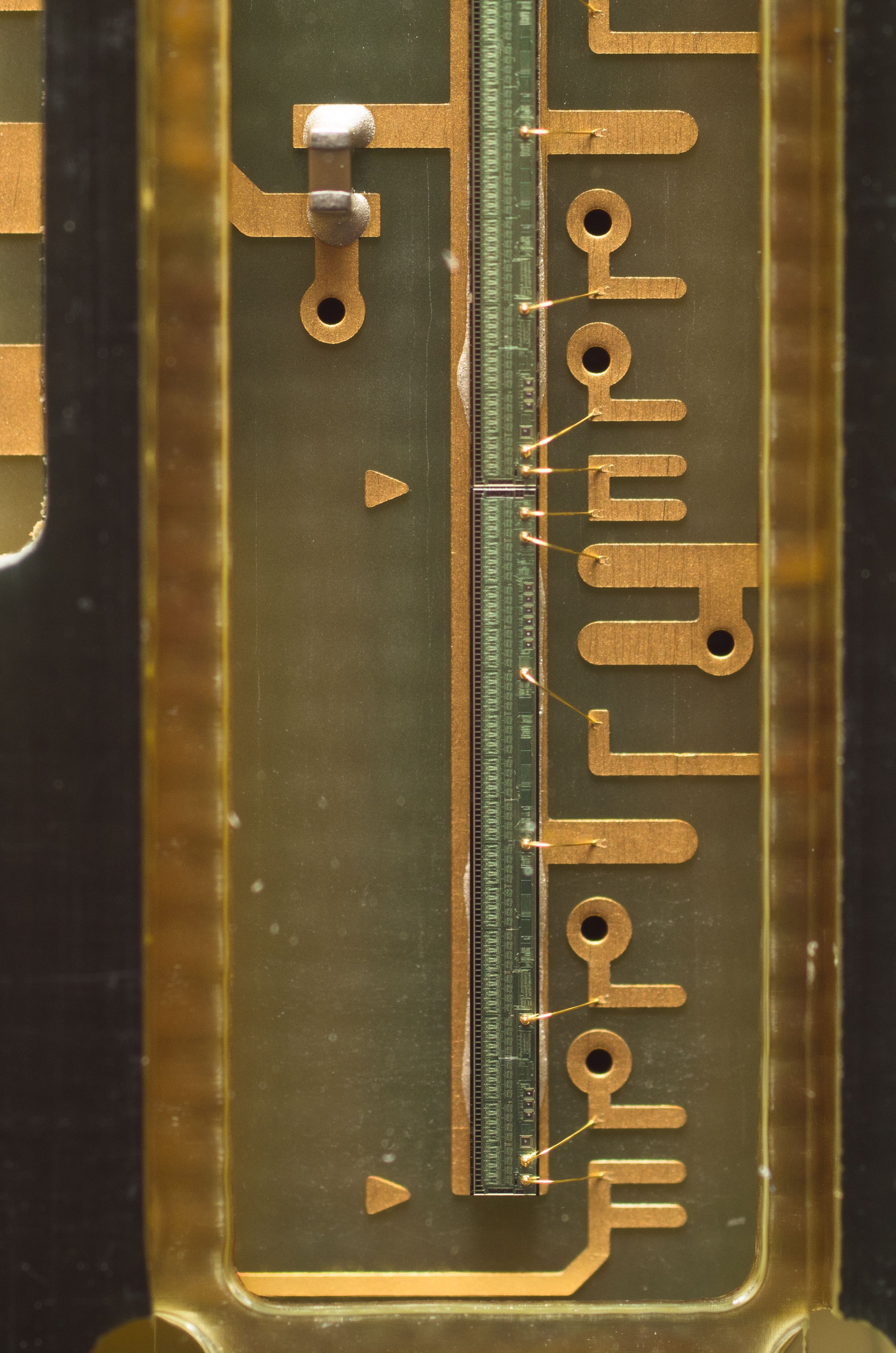
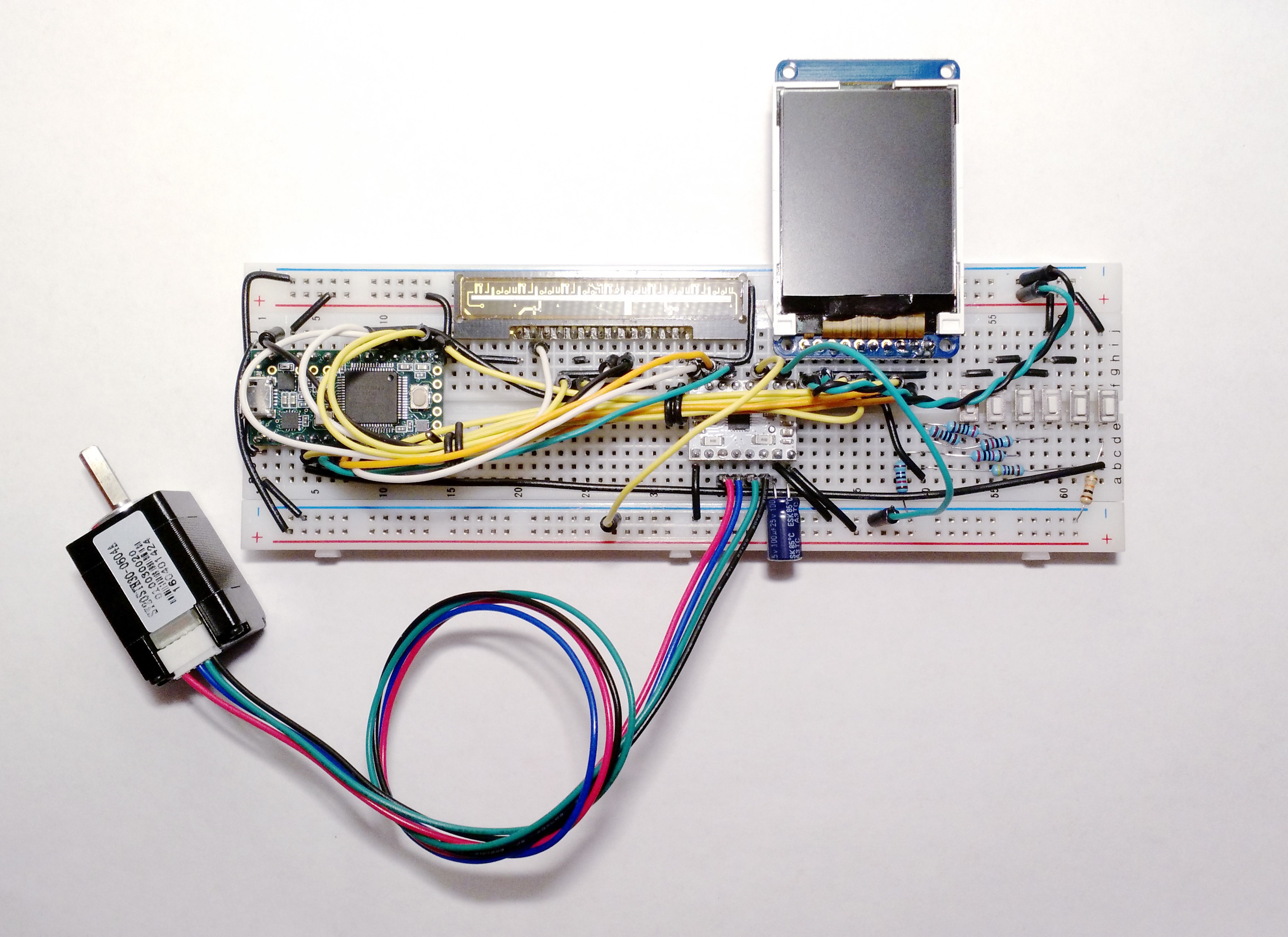
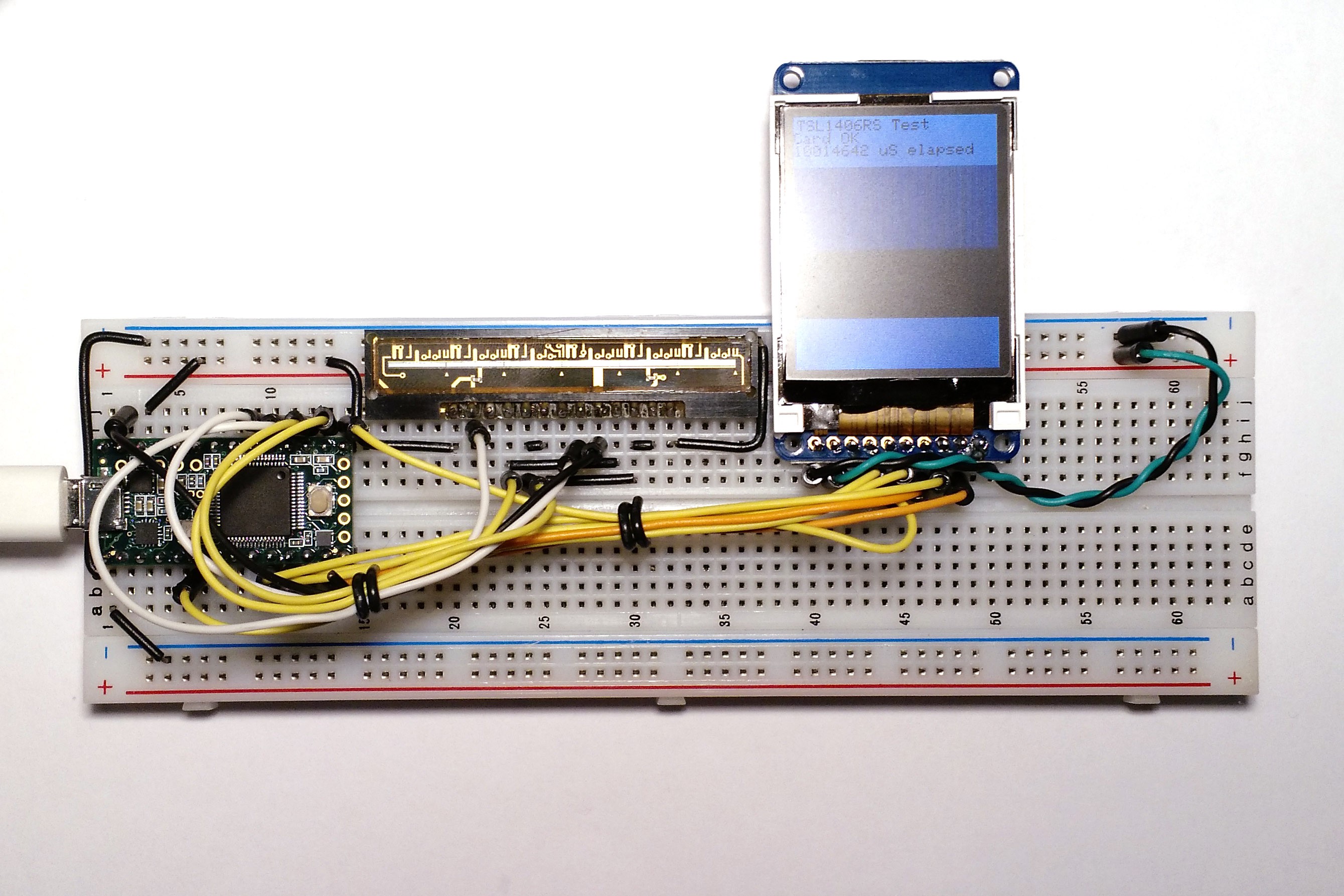
| Sensor | AMS (TAOS) TSL1406RS photodiode array, 768x1 px |
| Dimensions | 175 x 120 x 130mm (L x W x D, including lens), 175 x 120 x 74mm (without lens) |
| Image size | 1024 x 768 px (65mm x 48mm physical image) |
| Image format | 16-bit grayscale PGM (portable gray map), 48-bit color PPM |
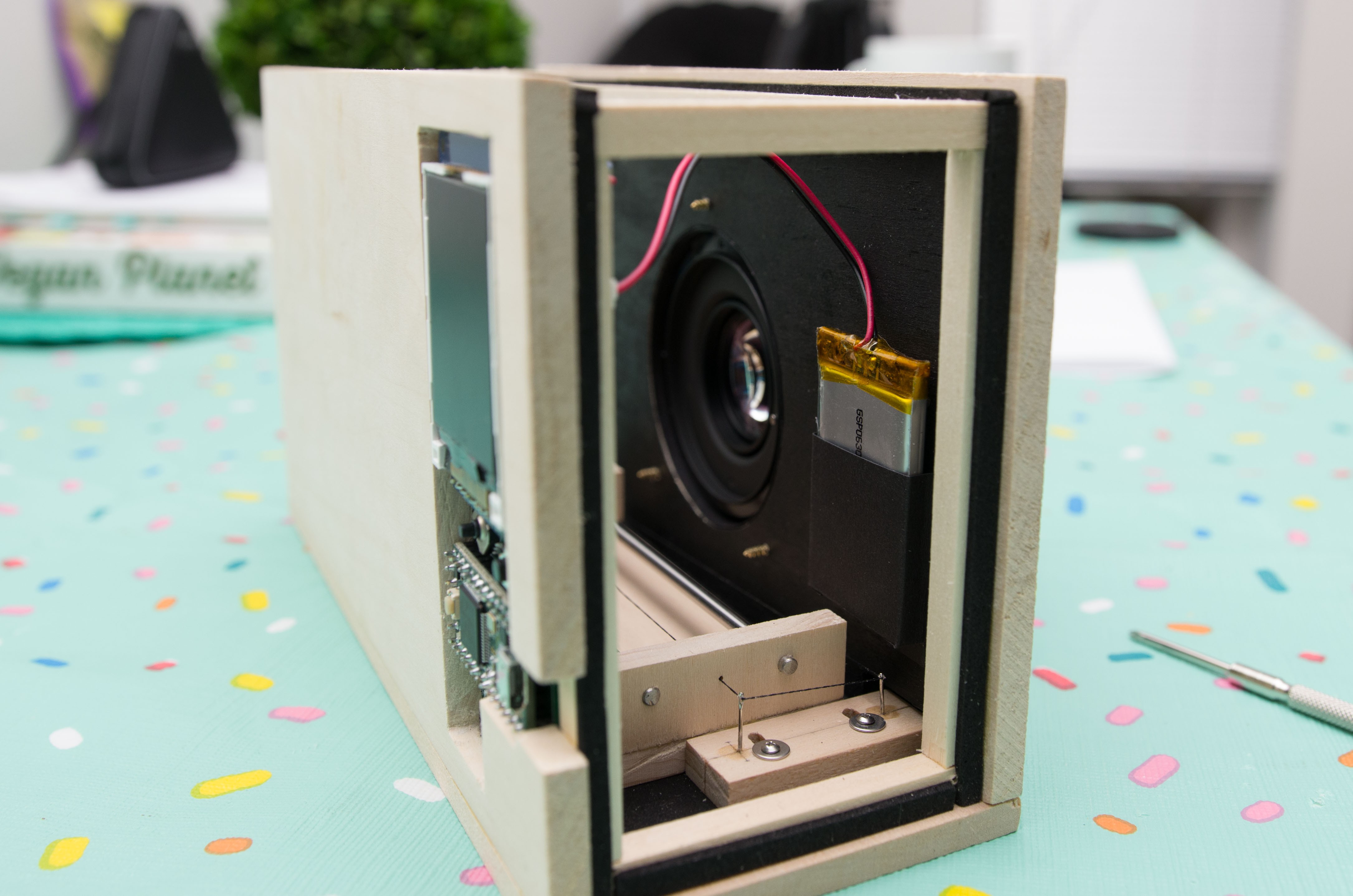
| Power | 3.7v Lithium Polymer cell, 850 mAh |
| Integration time | 1/15000 - 1/10 seconds |
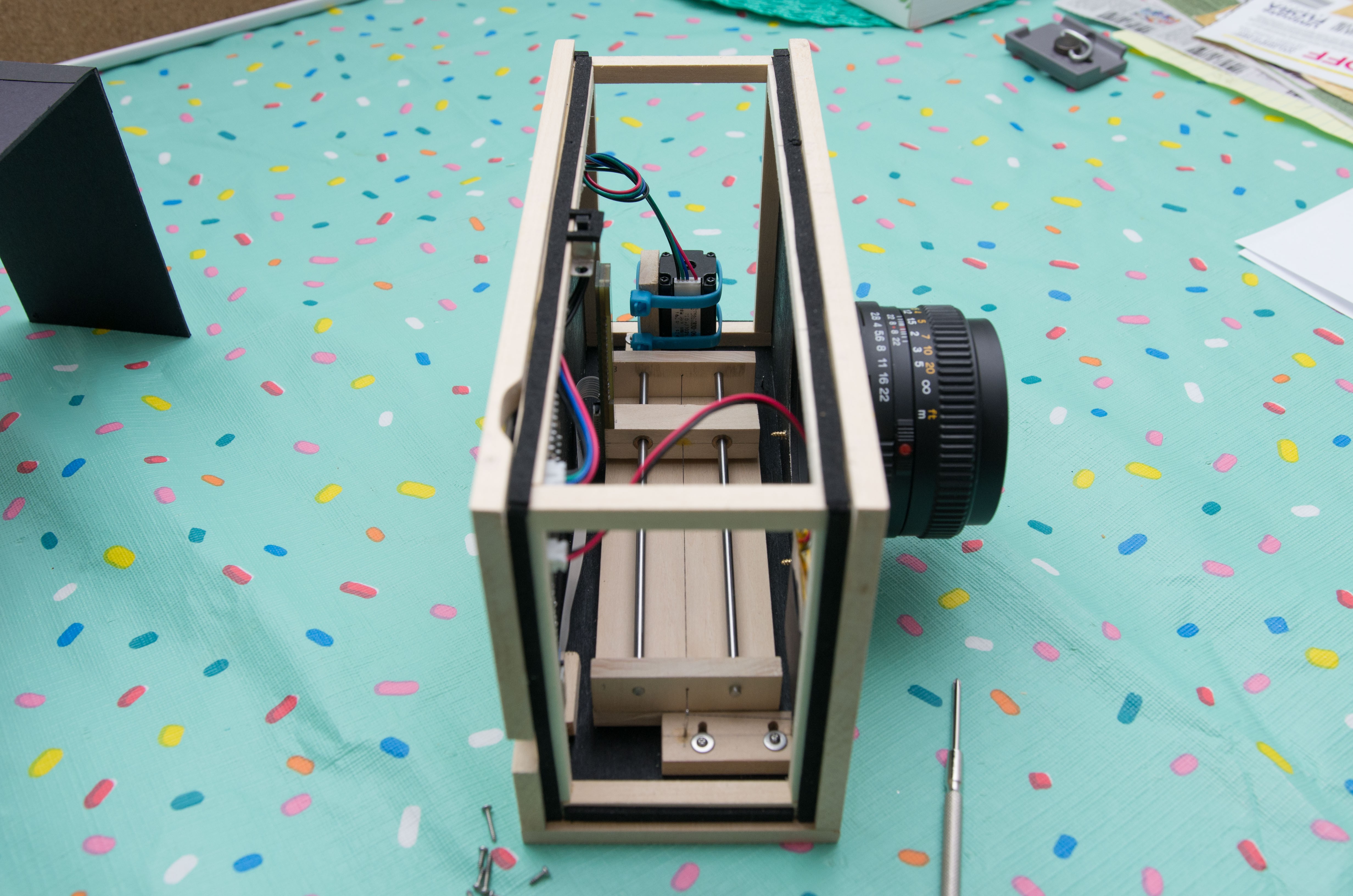
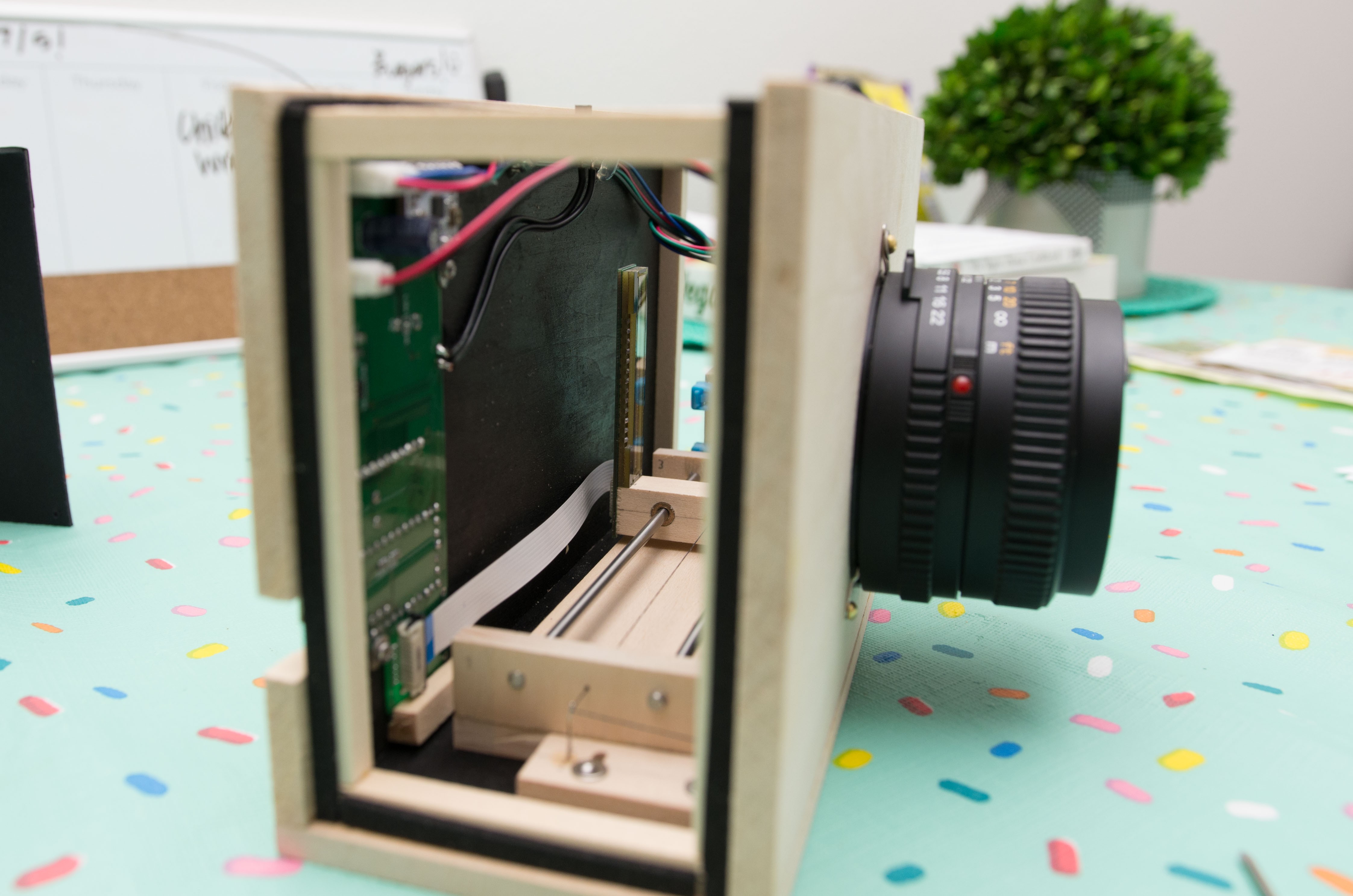
| Lens | Mamiya-Sekor 645 80mm f/2.8 N |
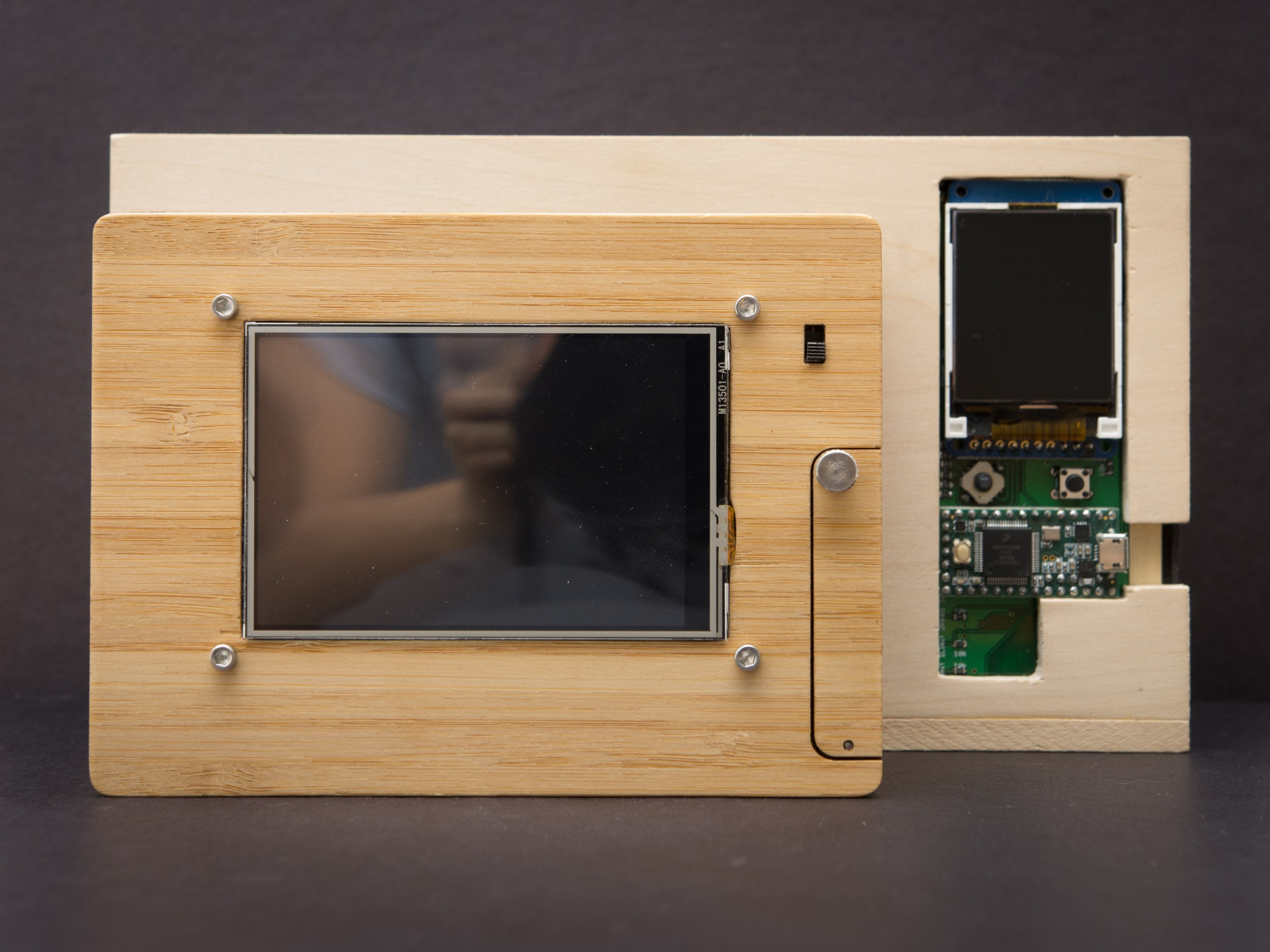
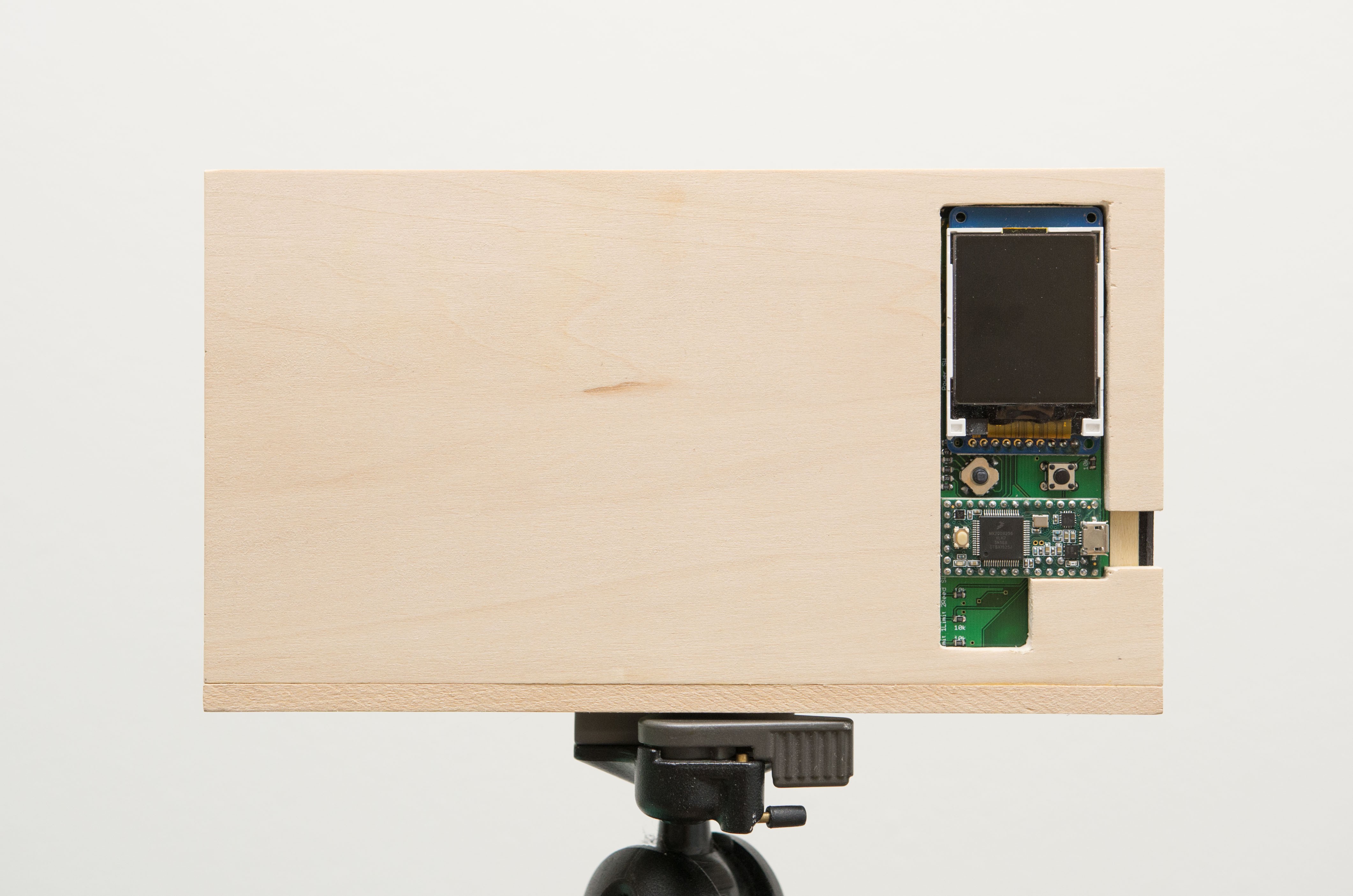
| Display | 1.8" Color TFT, 160 x 128 px |
| Weight | Approx. 1 kg |












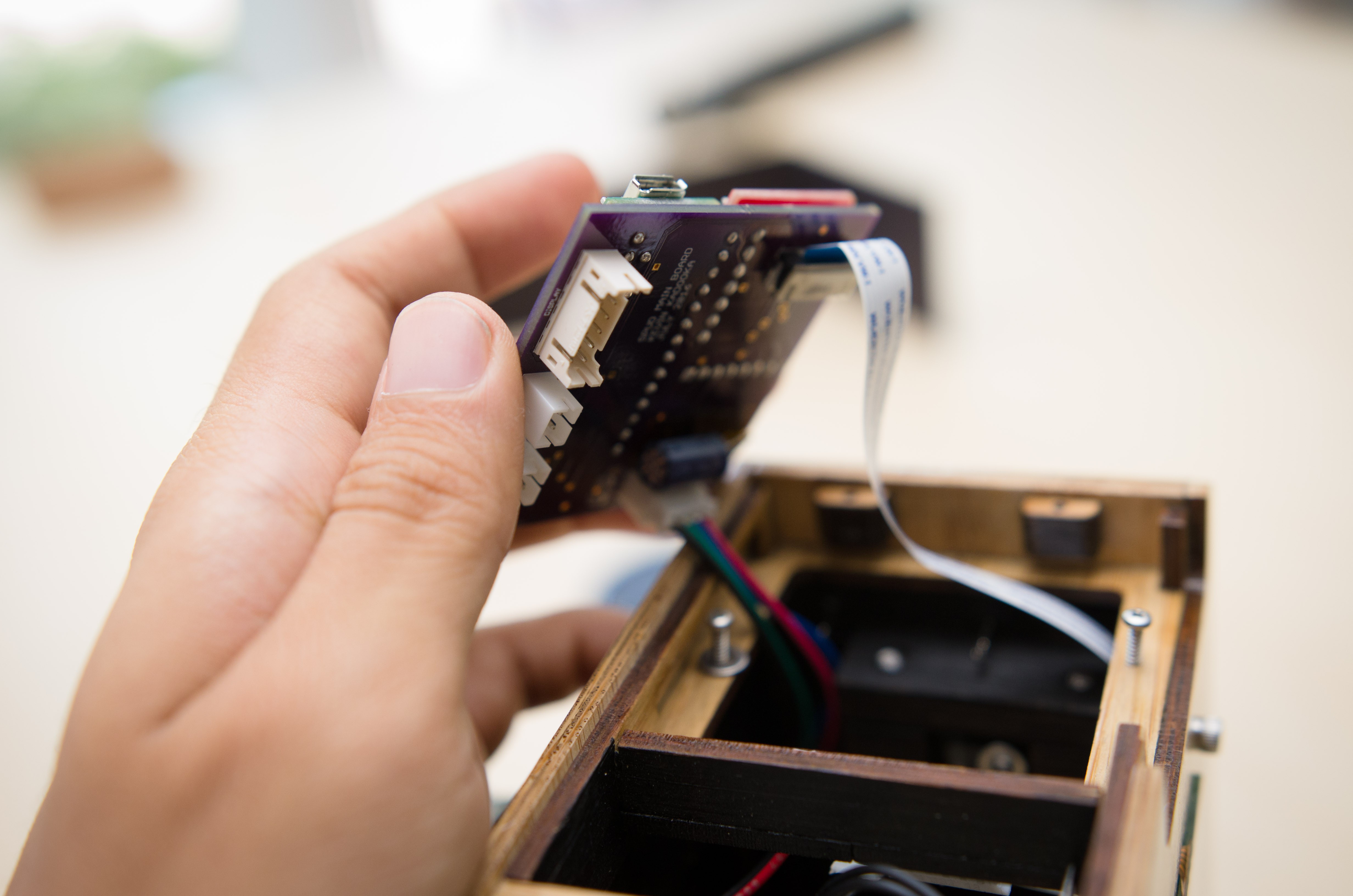



























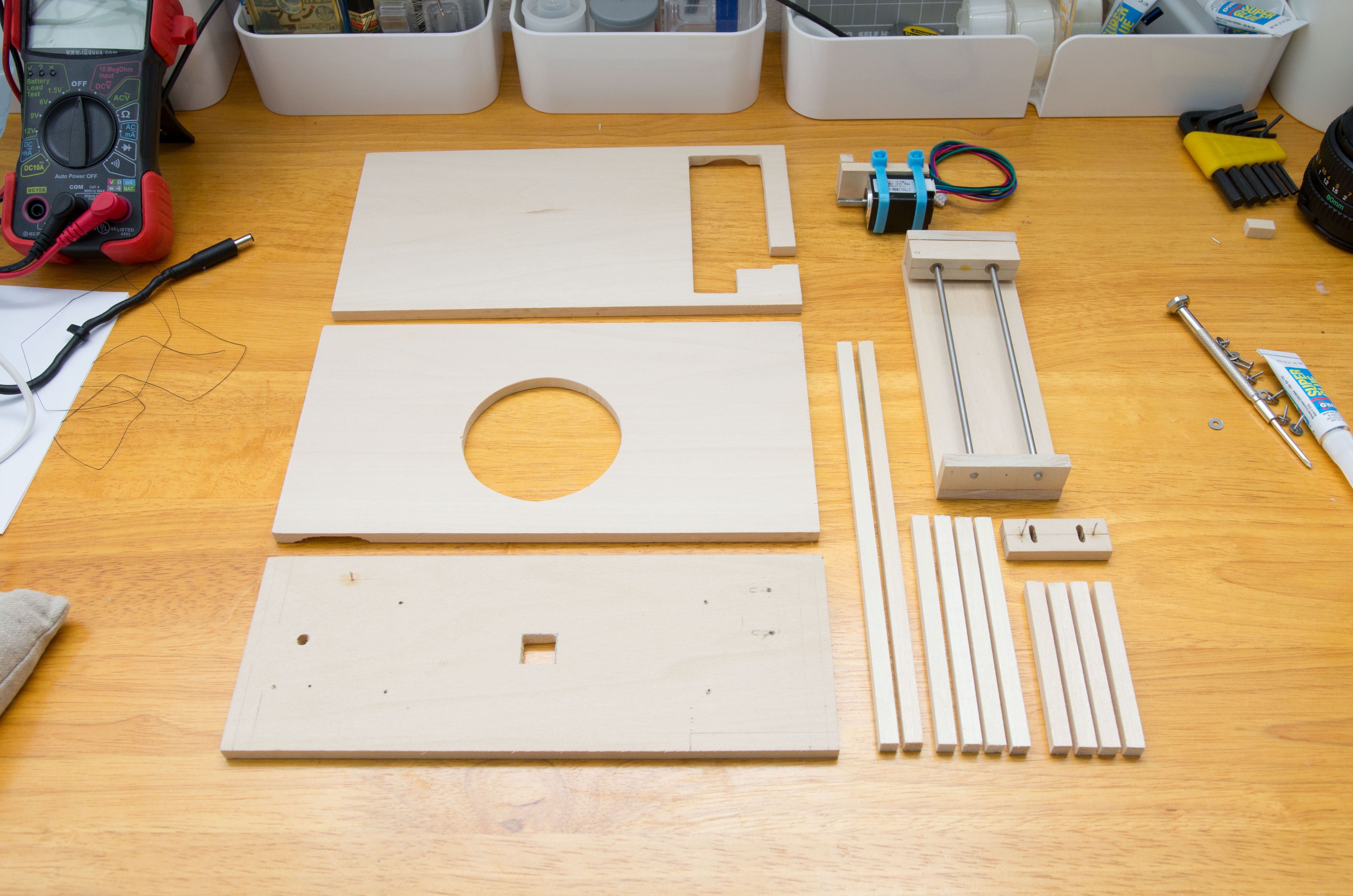
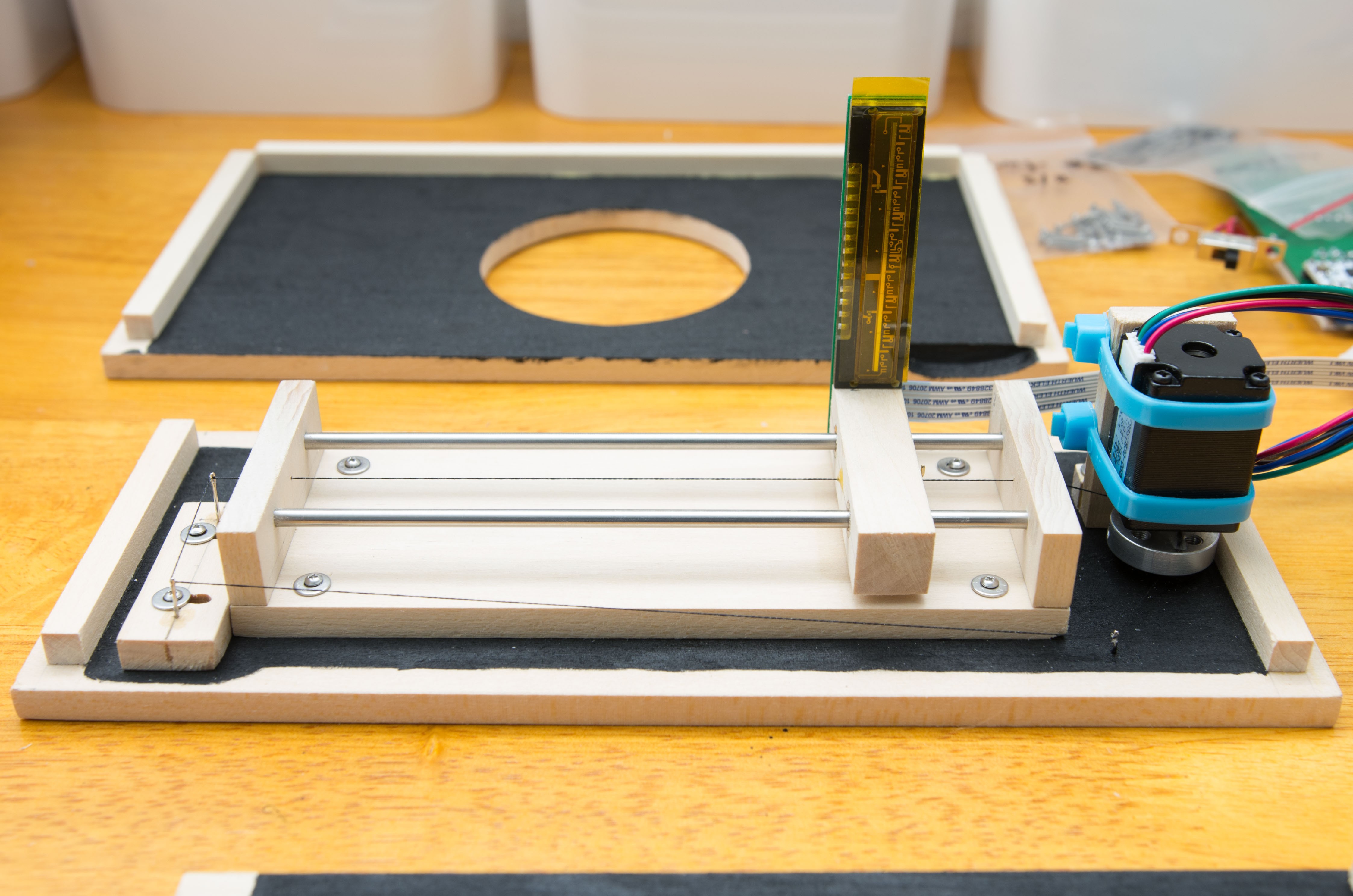


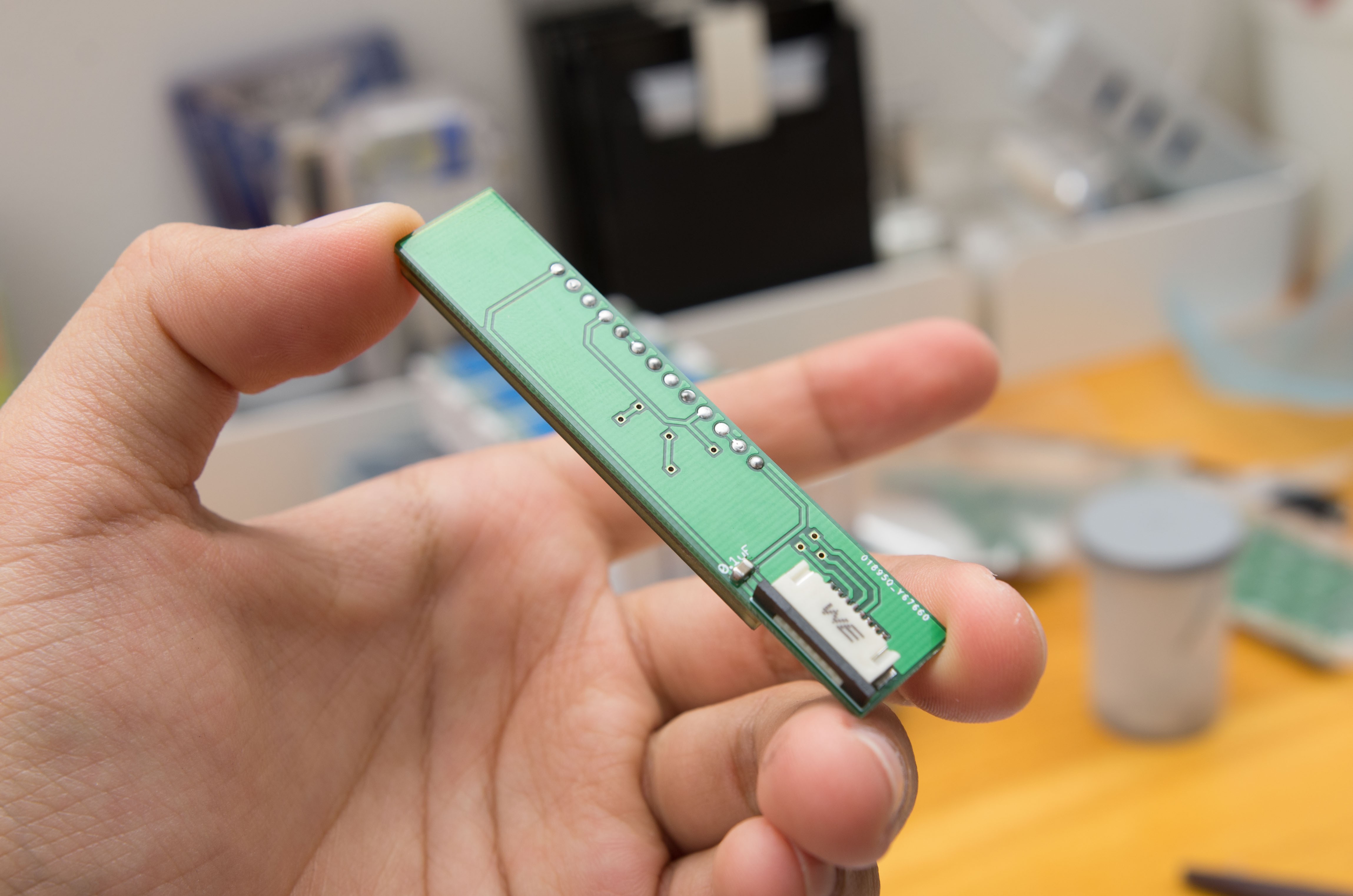
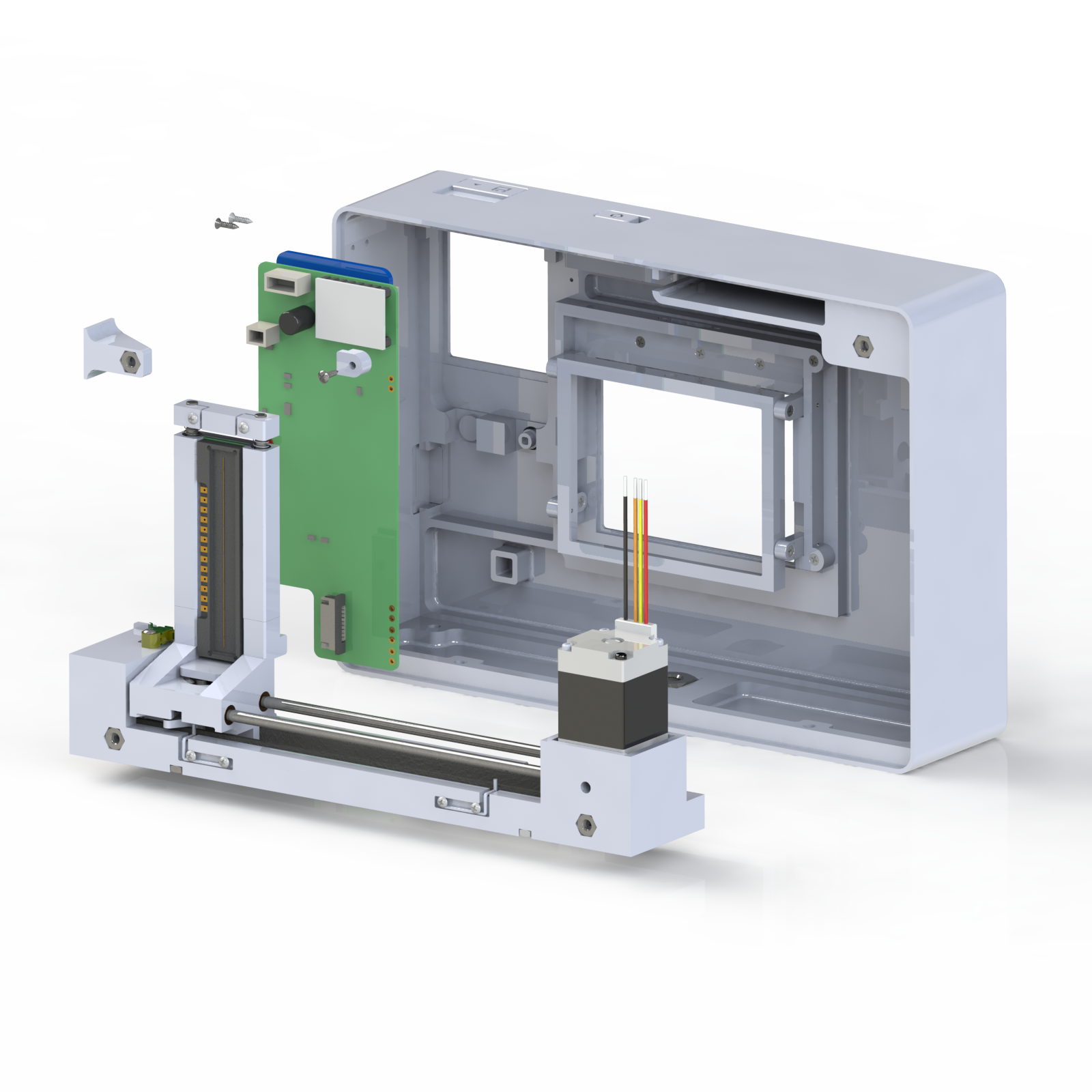
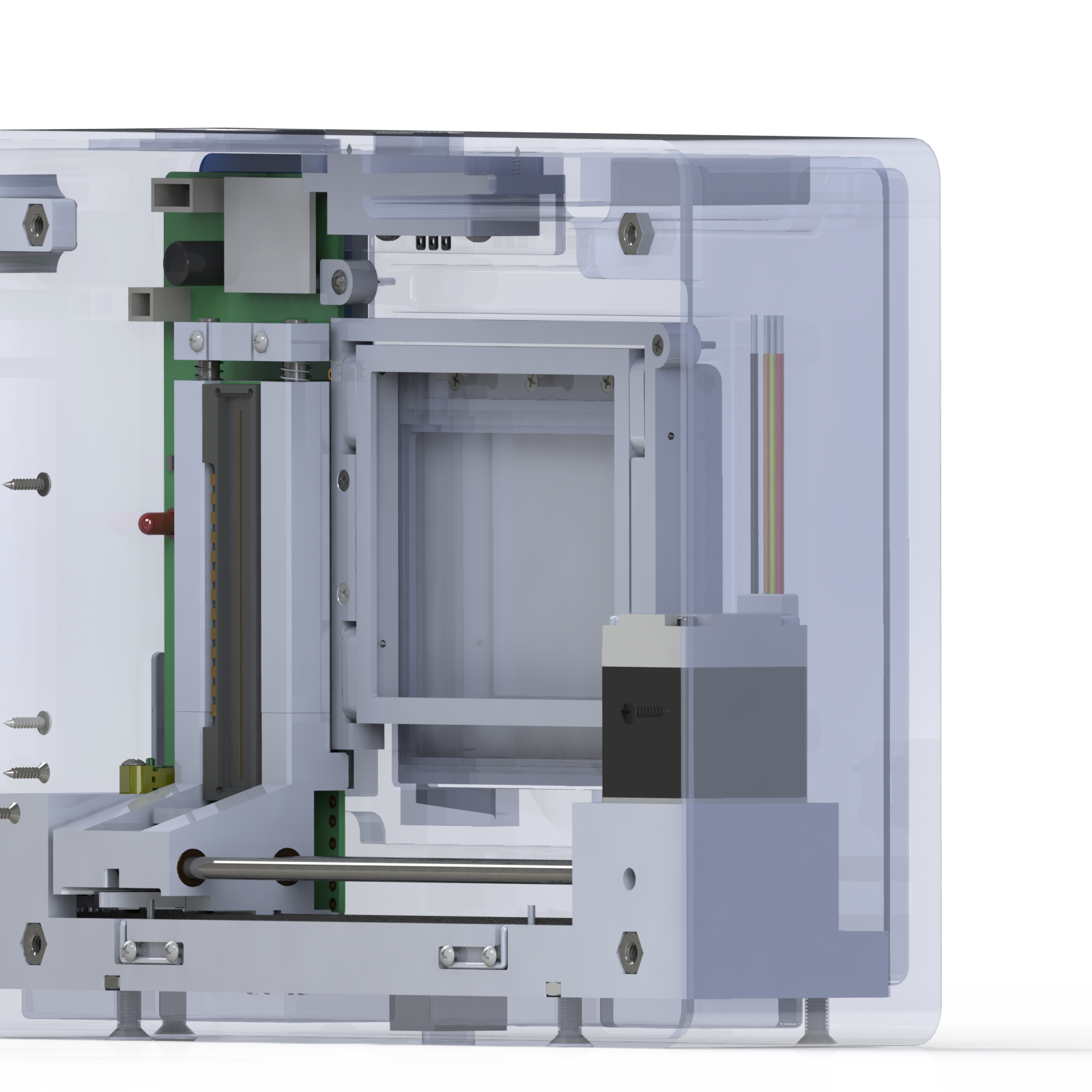
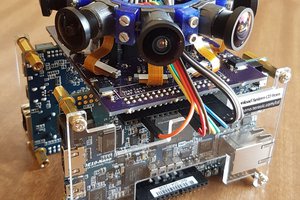
 Pop the top (just some black card stock) and you'll see that it's just a basswood skeleton with the electrical bits tacked on inside. A bit of open-cell foam is used to seal out extraneous light and improve contrast.
Pop the top (just some black card stock) and you'll see that it's just a basswood skeleton with the electrical bits tacked on inside. A bit of open-cell foam is used to seal out extraneous light and improve contrast.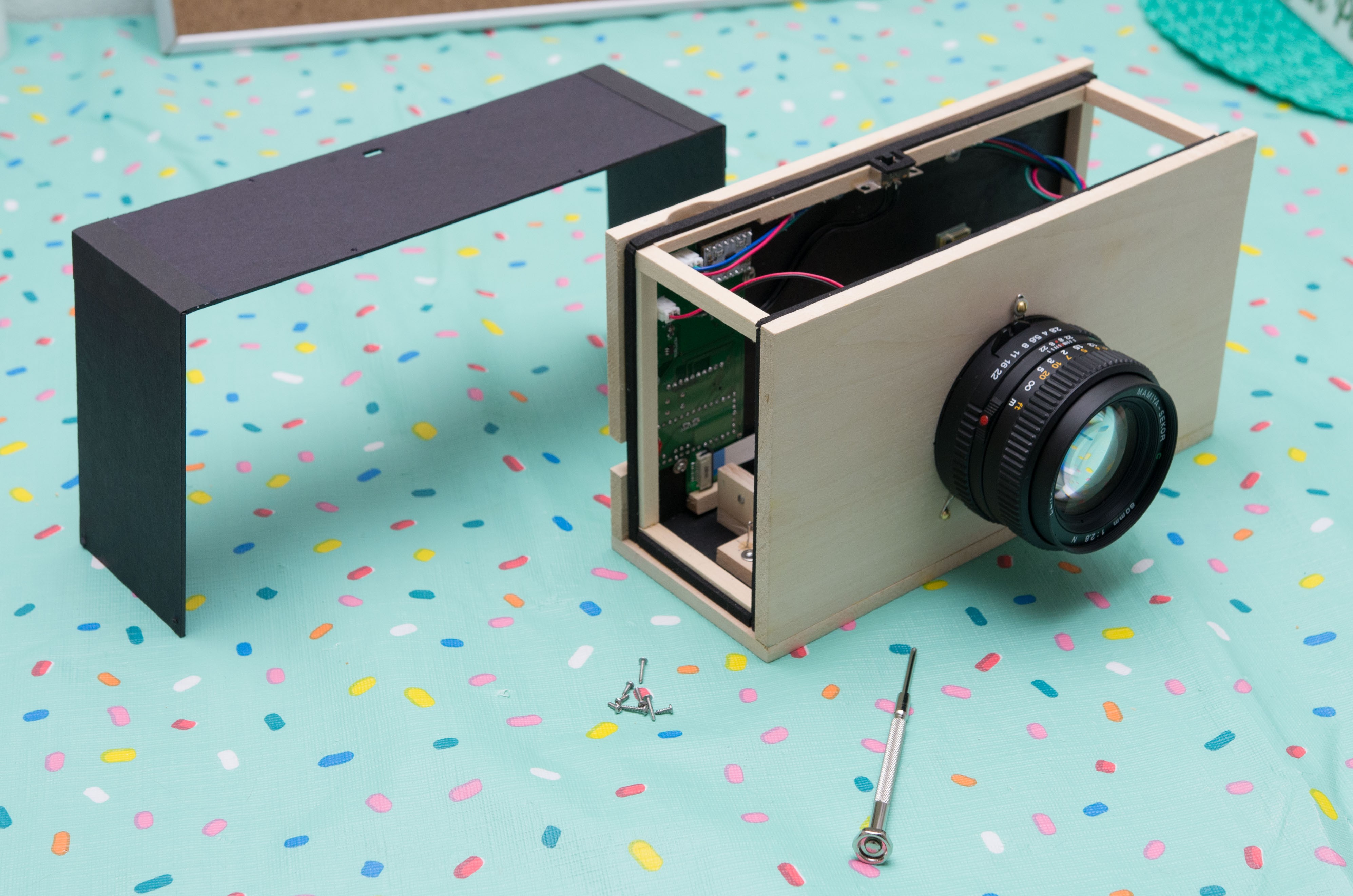





















 Stephen Holdaway
Stephen Holdaway
 Ahron Wayne
Ahron Wayne
 jimmy.c.alzen
jimmy.c.alzen
Please tell me you’re hosting the code for this somewhere, you’re blowing my mind!