0%
0%
low-field MRI Continued
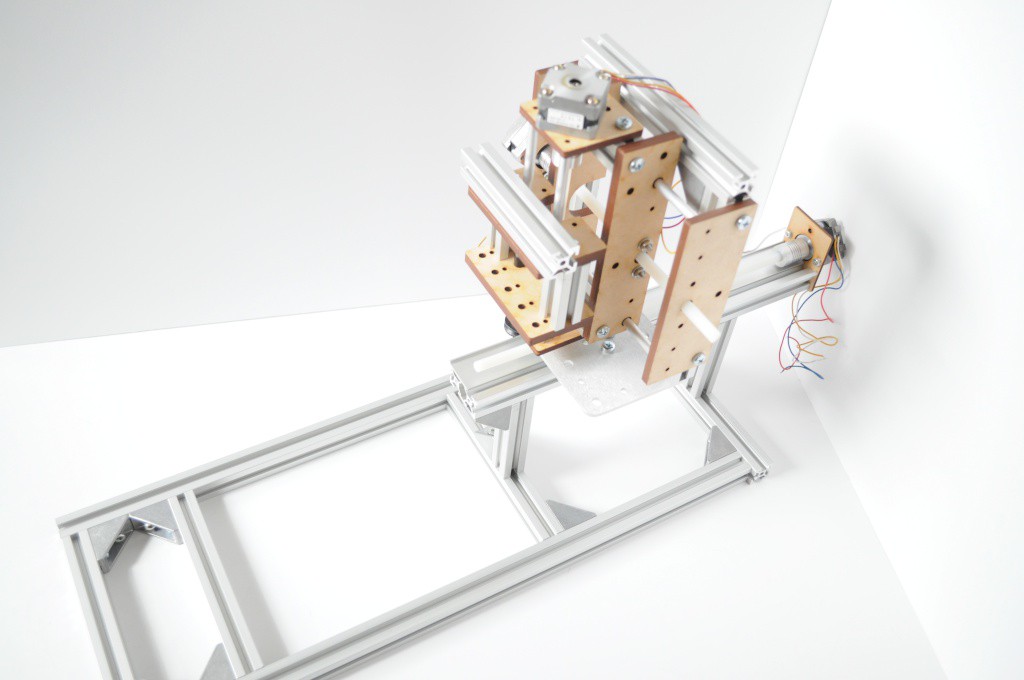
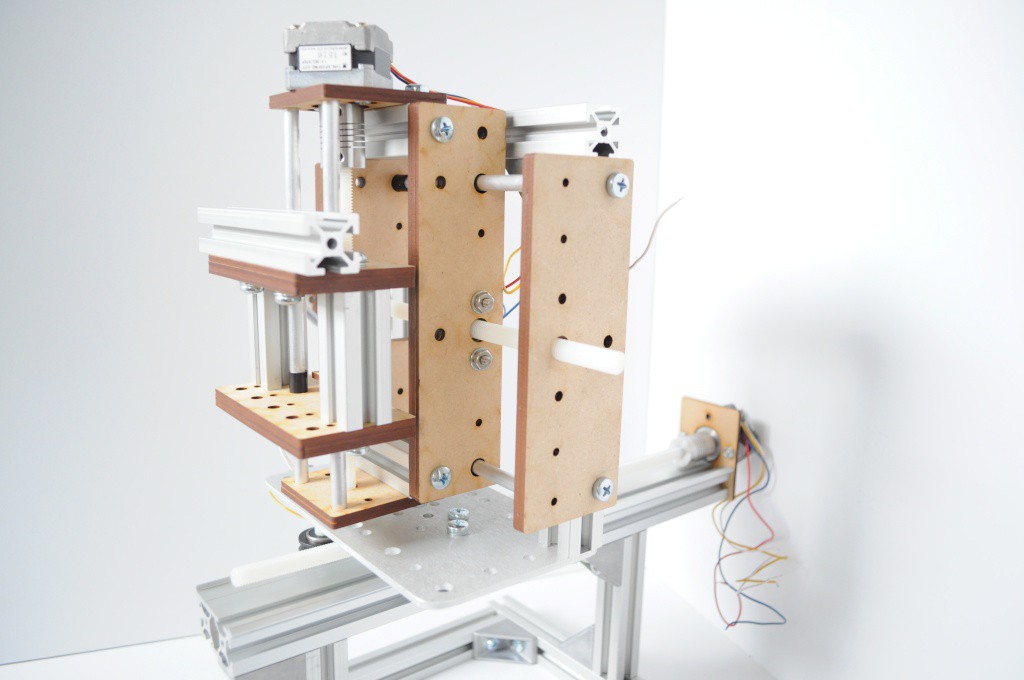
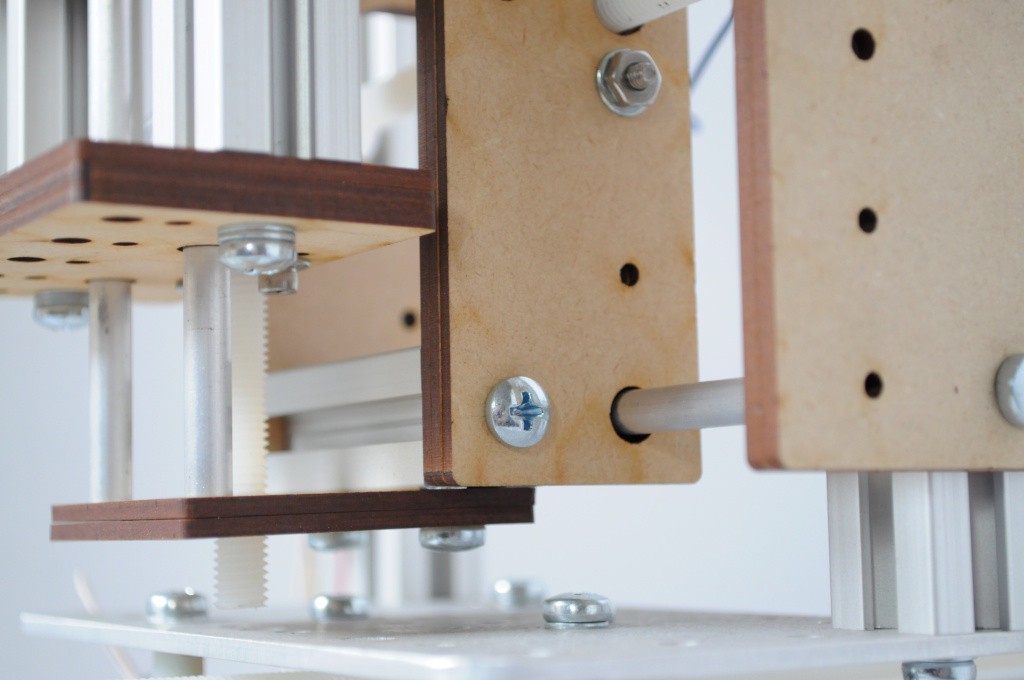
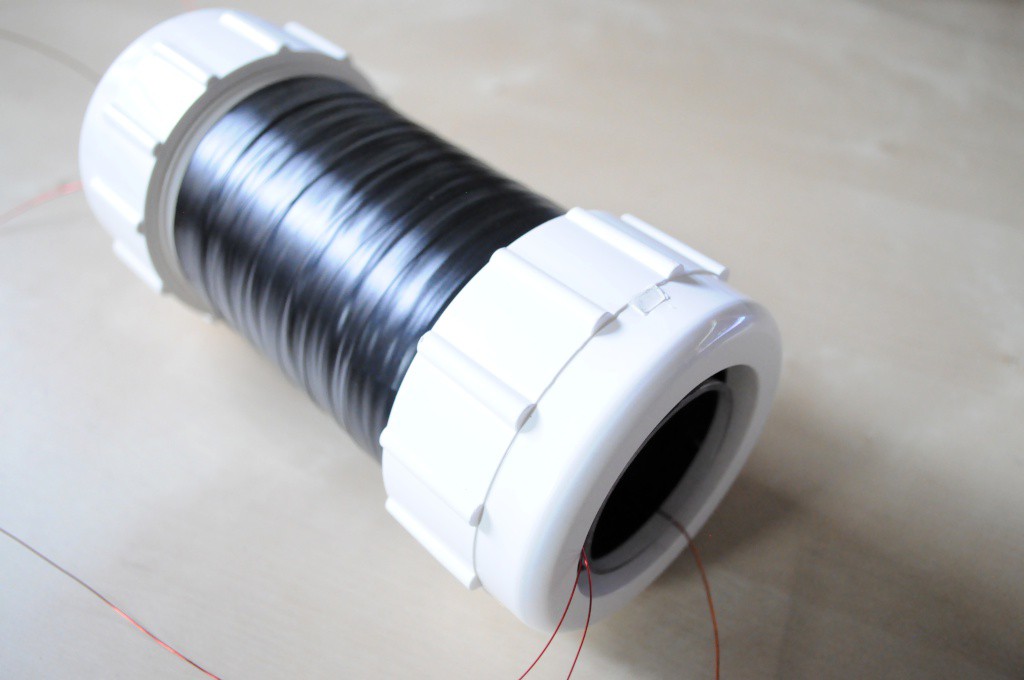
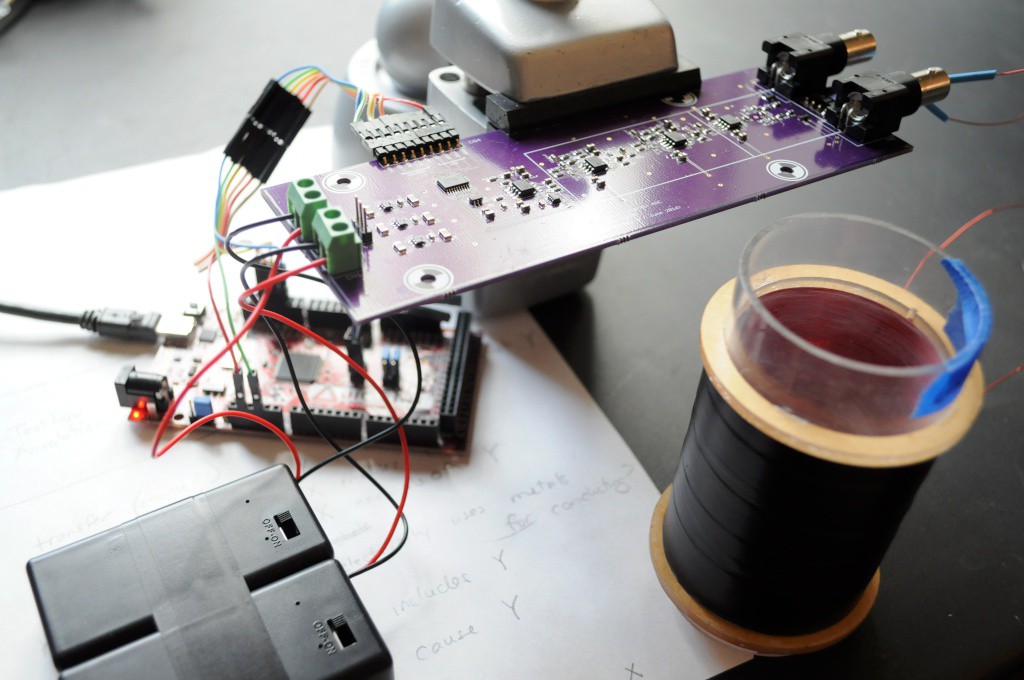
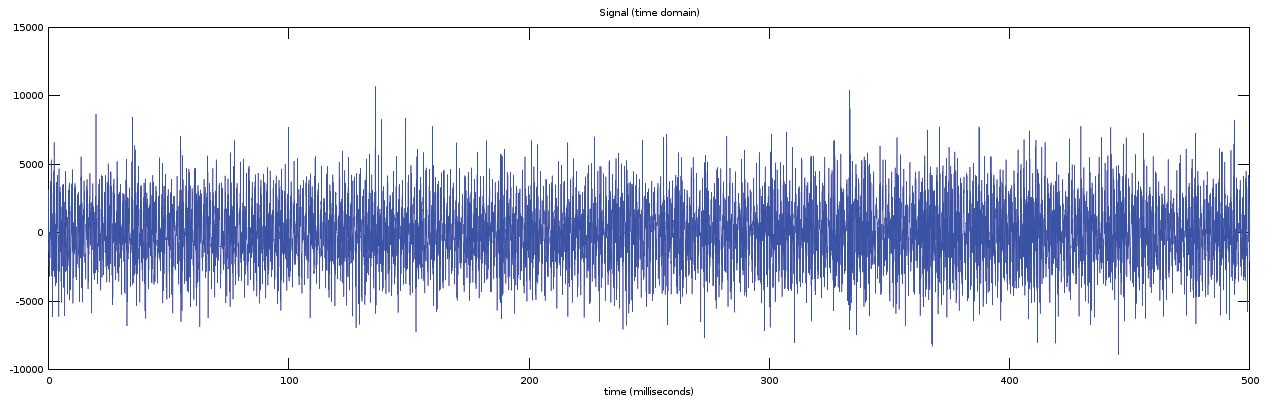
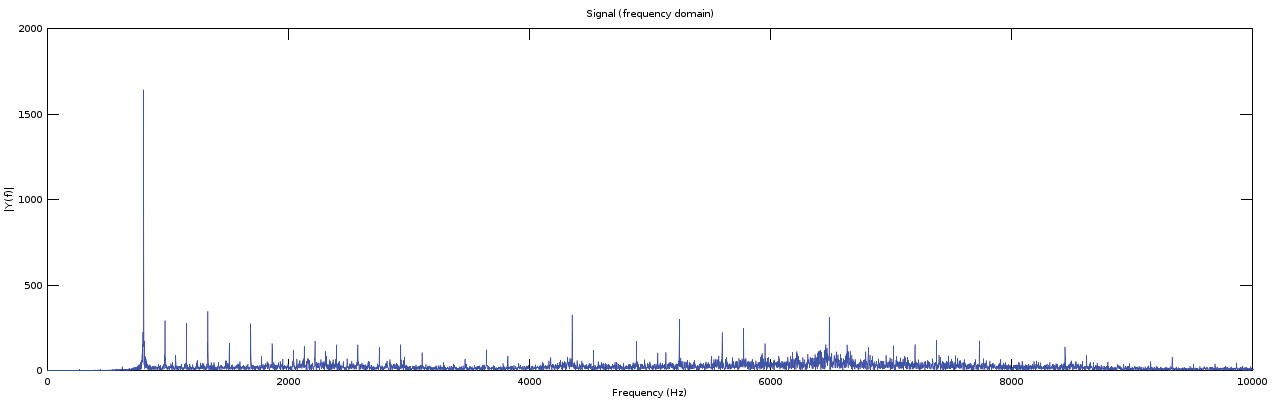
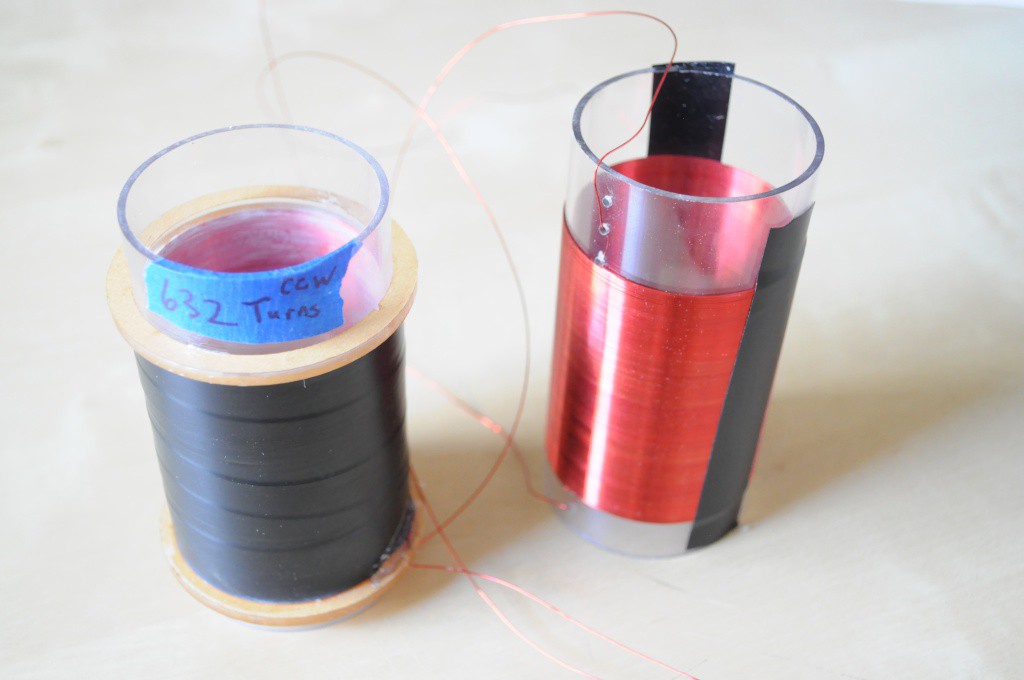
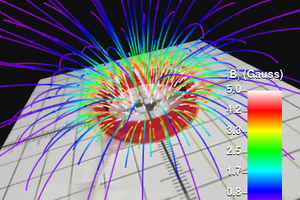
An attempt at a prepolarized Earth's-field compressive
magnetic resonance imager
 peter jansen
peter jansenBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Ted Yapo
Ted Yapo

 Bradley Worley
Bradley Worley
Fascinating!
I know Dr. Damadian, patent holder for the MRI concept and founder/owner of Fonar.
Yes, he holds the patent and every manufacturer of MRI pays Dr. Damadian a royalty.
His original prototype is in the Smithsonian museum in Washington, DC.
He's a FASCINATING man and I believe if properly approached would be delighted to assist I this project (think of the "mad scientist" who really DOES look like Boris Karloff as the "mad scientist".
I've spent many millions with his company as I purchased the first production stand up MRI machines from him.
Check out Fonar.com and my company washingtonopenmri.com for more information.
Go directly to the source and I believe Dr. Damadian would welcome your questions and be a supporter!