 Dennis
DennisGoals:
- An easy way to call different automated functions that anyone off the street could use.
- A voice response from the robot.
- Multiple useful automated functions on an expandable platform.
Accomplishments so far:
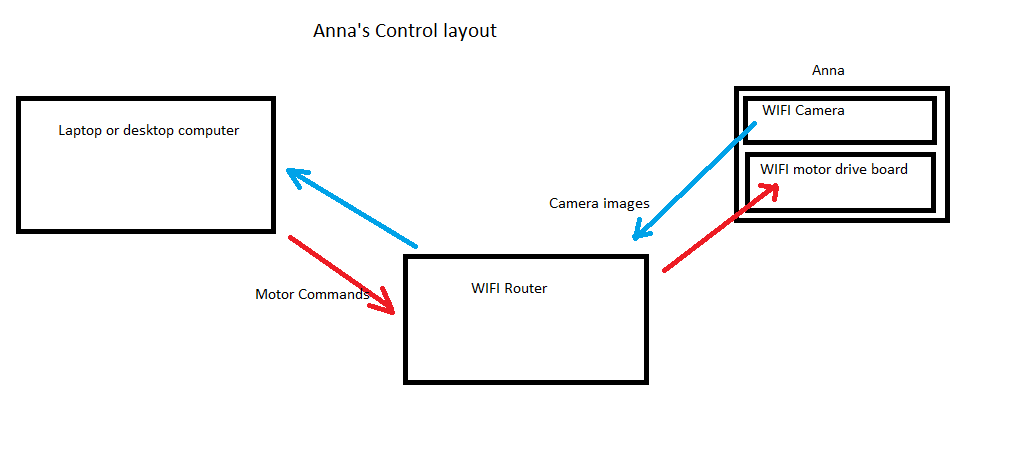
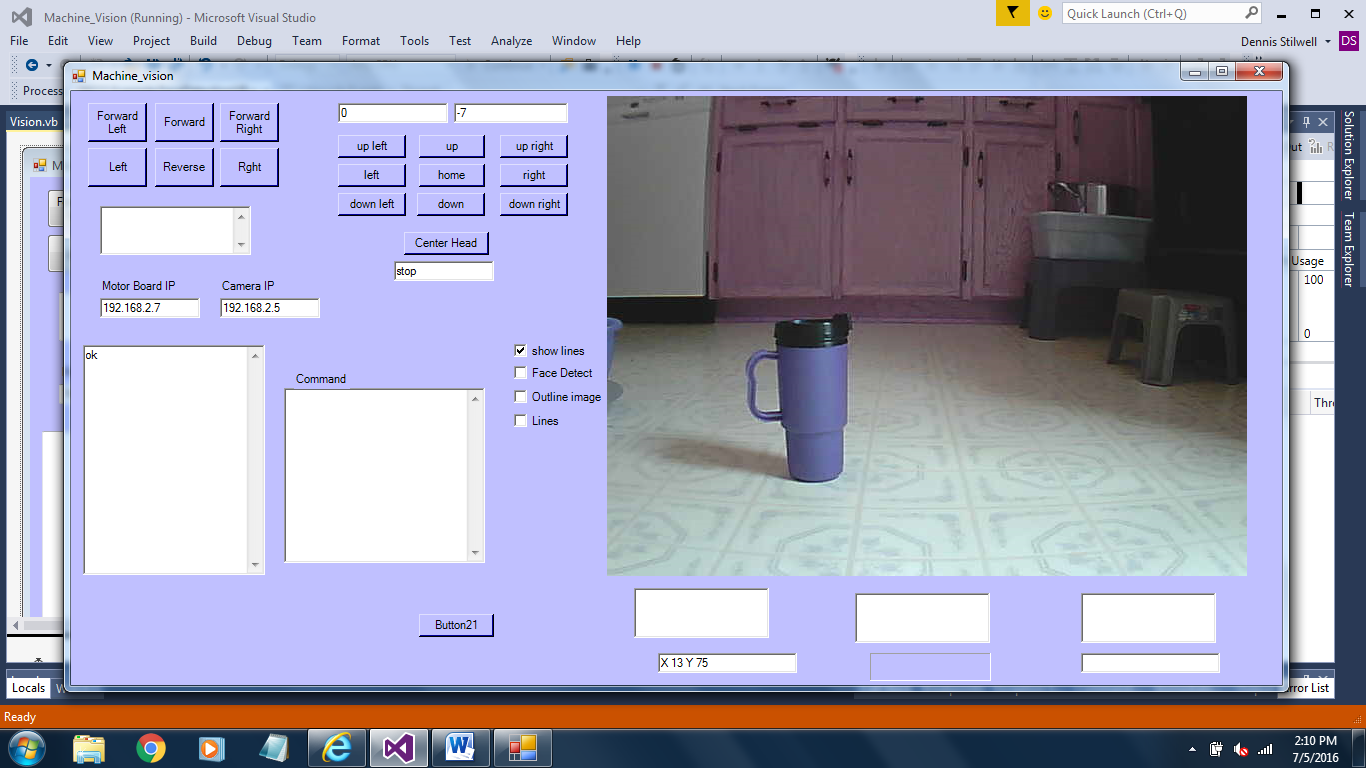
-Teleoperated through a WIFI network
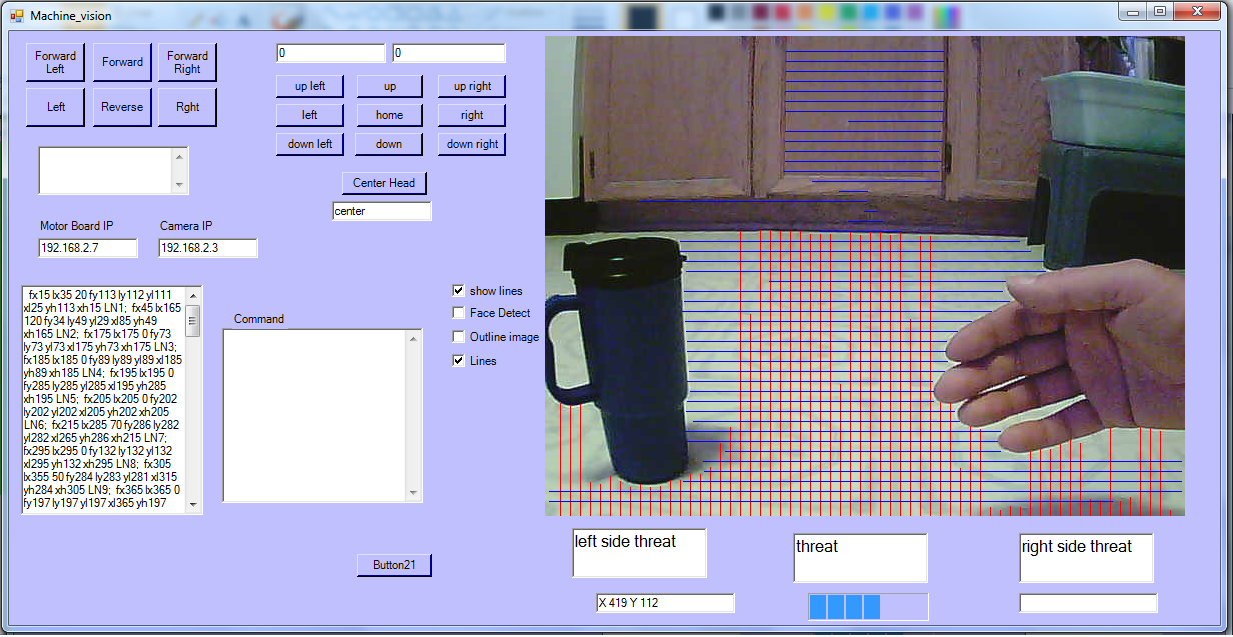
- Vision based object avoidance
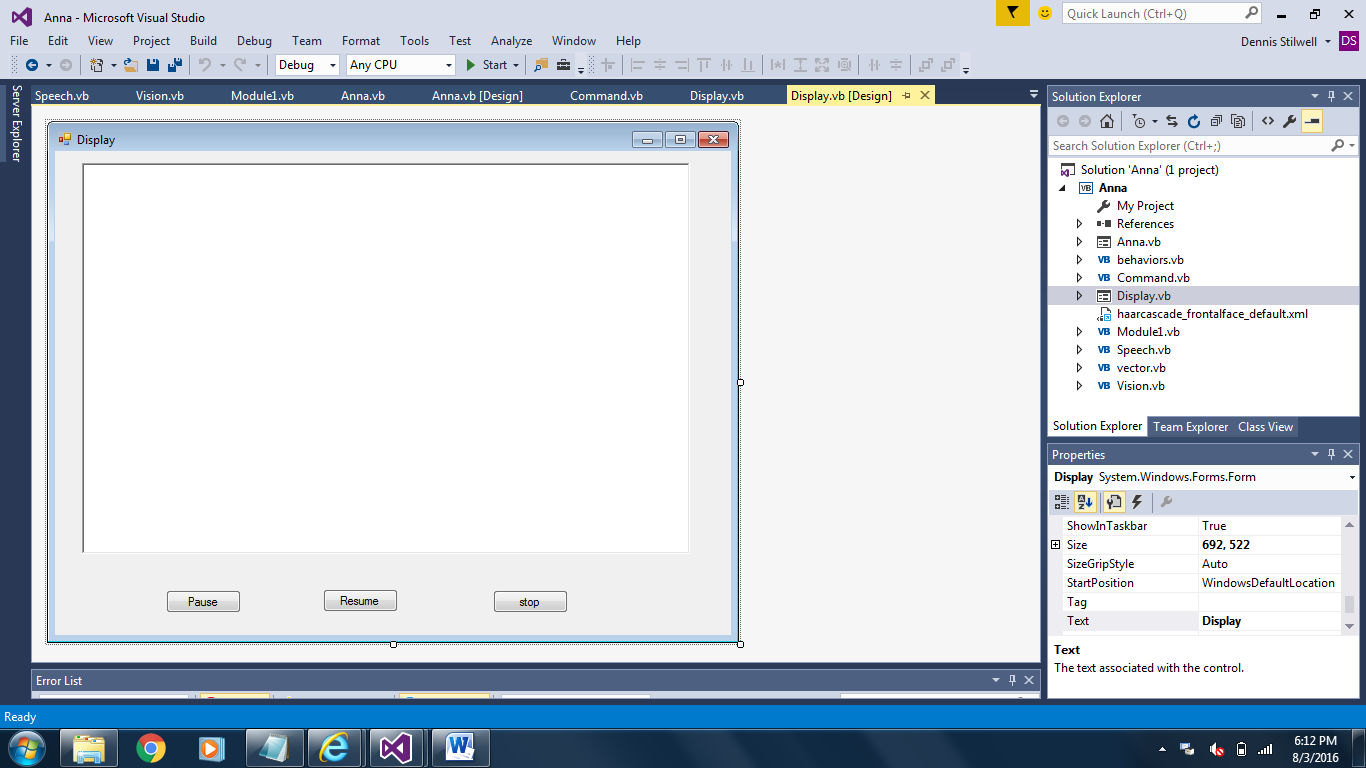
- Easy to use plain test user interface
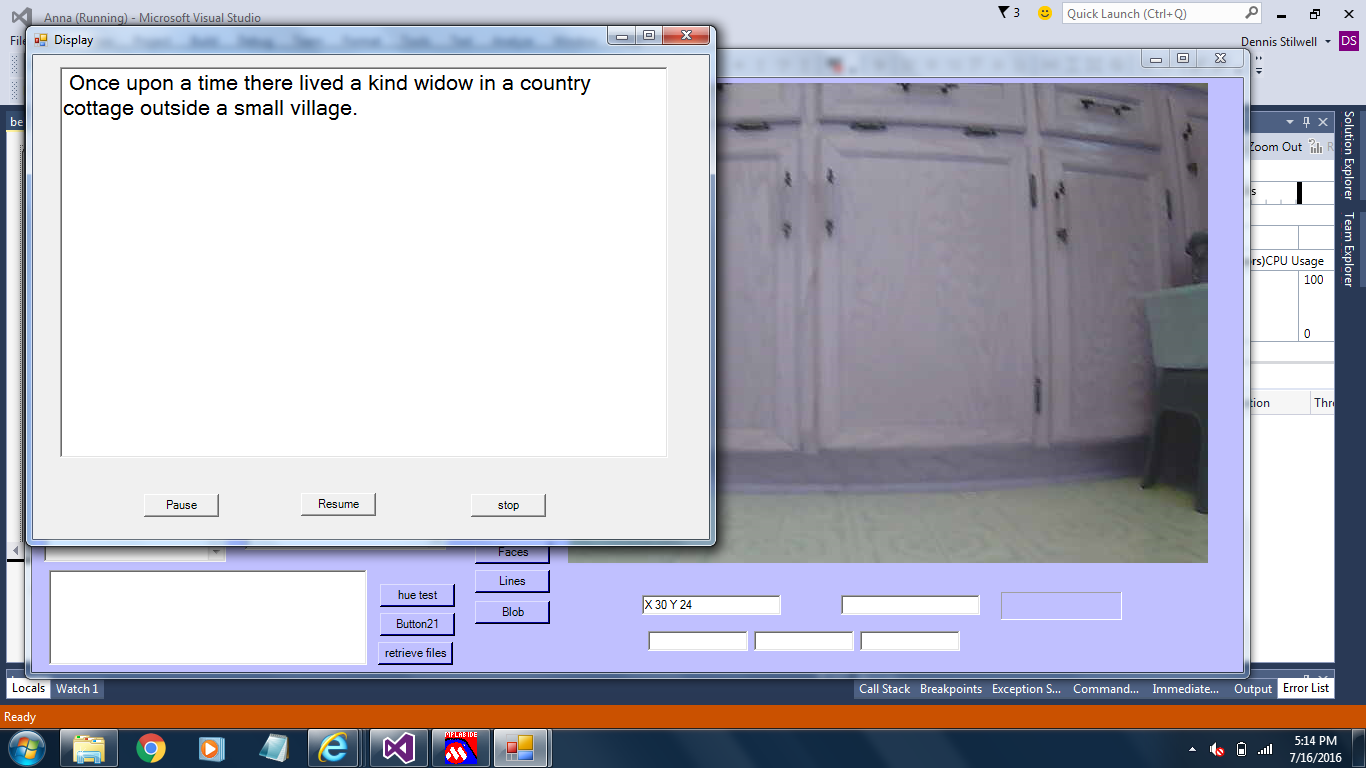
- Face detection and tracking
- Voice response from the robot
- Story telling application
Details:
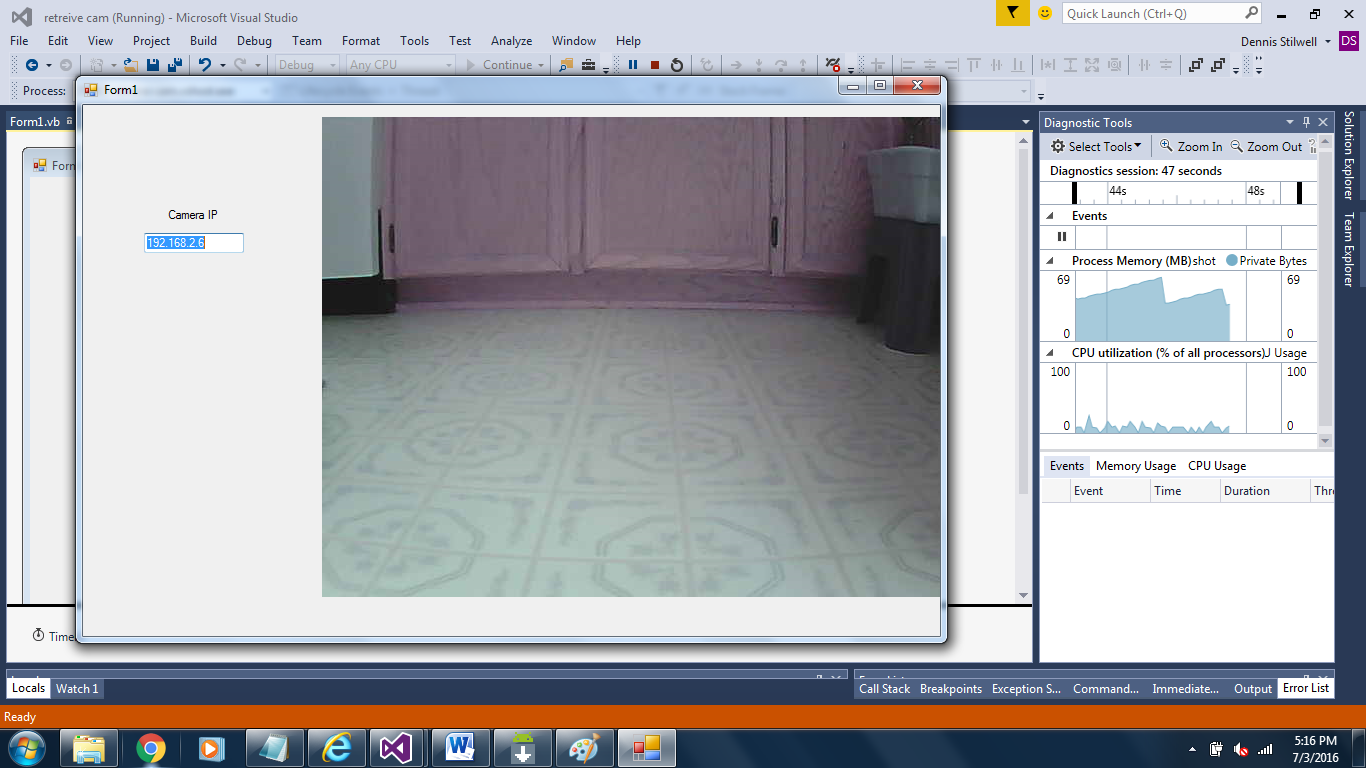
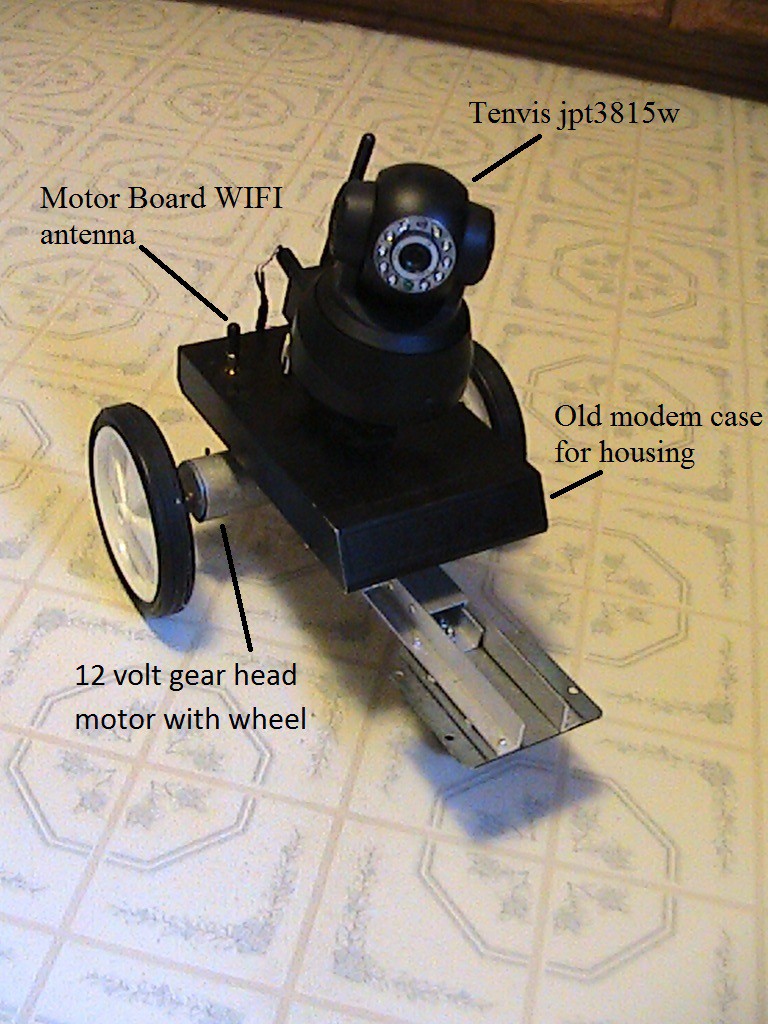
Anna is a simple robot (built mostly from stuff I found in my basement) with a Tenvis jpt3815w WIFI camera, a DIY WIFI motor-controller board powered by a PIC16F874A Micro controller from MicroChip Inc., a WIFI Module, two h-bridge motor drivers and a port to add an arm so Anna will be able to manipulate objects in her world in the future. I chose the Tenvis camera because it is low cost and has a built-in pan and tilt.
Anna is controlled by a desktop or laptop through a WIFI network. Anna's program is written with Visual Studios Community in Visual Basic. This allows for an easy way of programming and testing ideas, plus adds a lot of processing power. The vision system will be a combination of EMGU OpenCV along with some original code.
By designing an easy-to-use user interface that anyone can operate to call different functions and a voice response from the robot to make it easy to know the robot is executing your command, plus an expandable platform that can grow and perform an ever expanding list of useful tasks, we will be taking steps to realizing the dream of a personal robot that anyone can use.
EMGU License information available here:
http://www.gnu.org/licenses/gpl-3.0.txt
Microsoft Visual Studio Community License information available here:
https://msdn.microsoft.com/en-us/subscriptions/cc150618.aspx
 Here's the image after invoking the Canny Edge Detector:
Here's the image after invoking the Canny Edge Detector: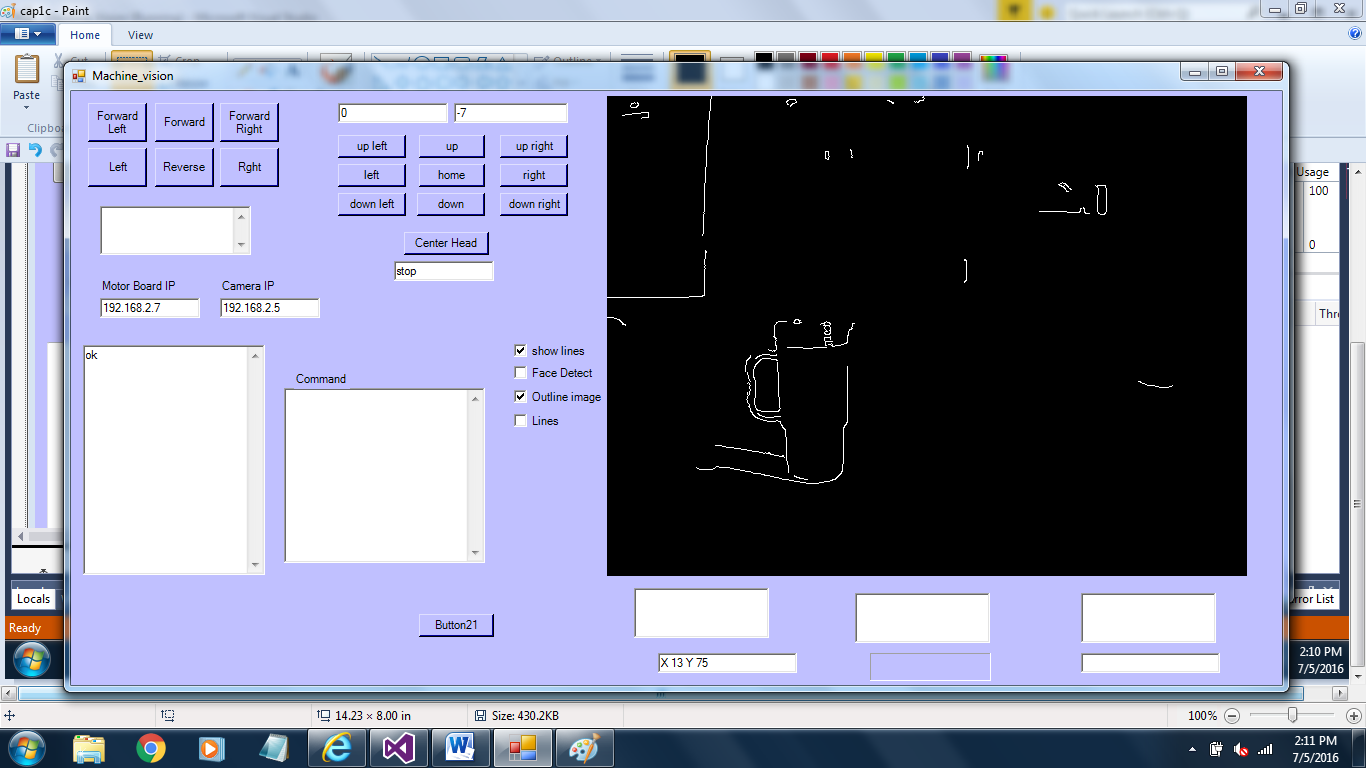
 And here's the inside.
And here's the inside.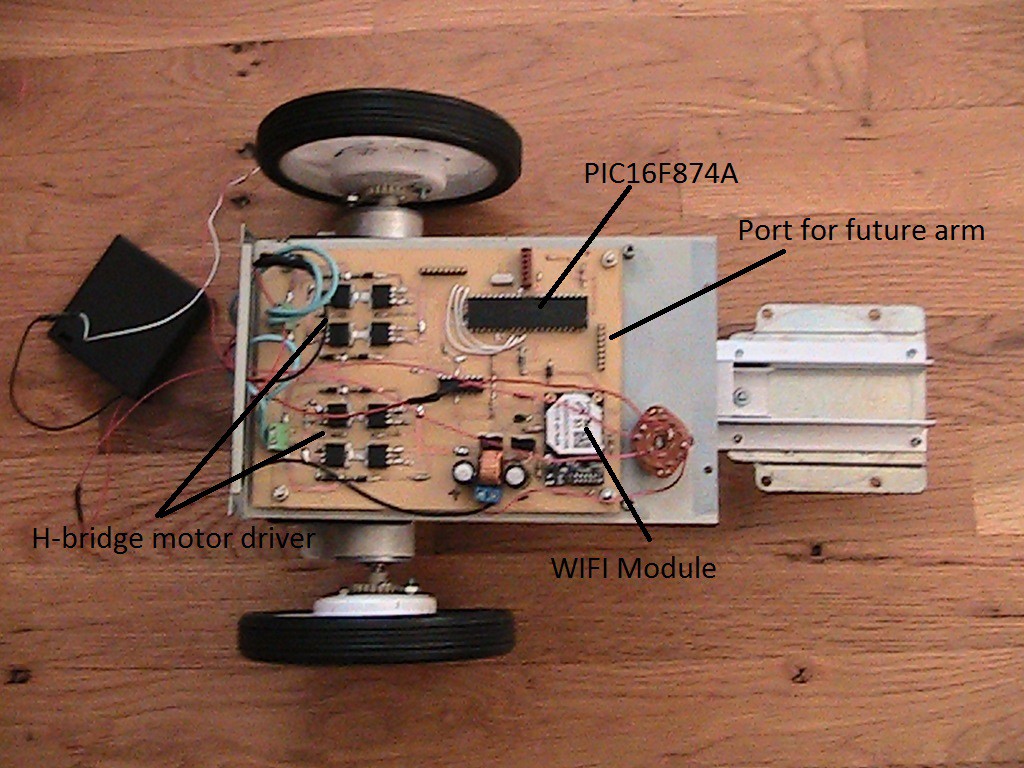 Here’s a video of Anna under remote control from a Laptop
through a WIFI network with a video feed from the robot’s camera and testing control
of the robot’s camera pan and tilt, along with control of the robot’s two drive
motors.
Here’s a video of Anna under remote control from a Laptop
through a WIFI network with a video feed from the robot’s camera and testing control
of the robot’s camera pan and tilt, along with control of the robot’s two drive
motors.
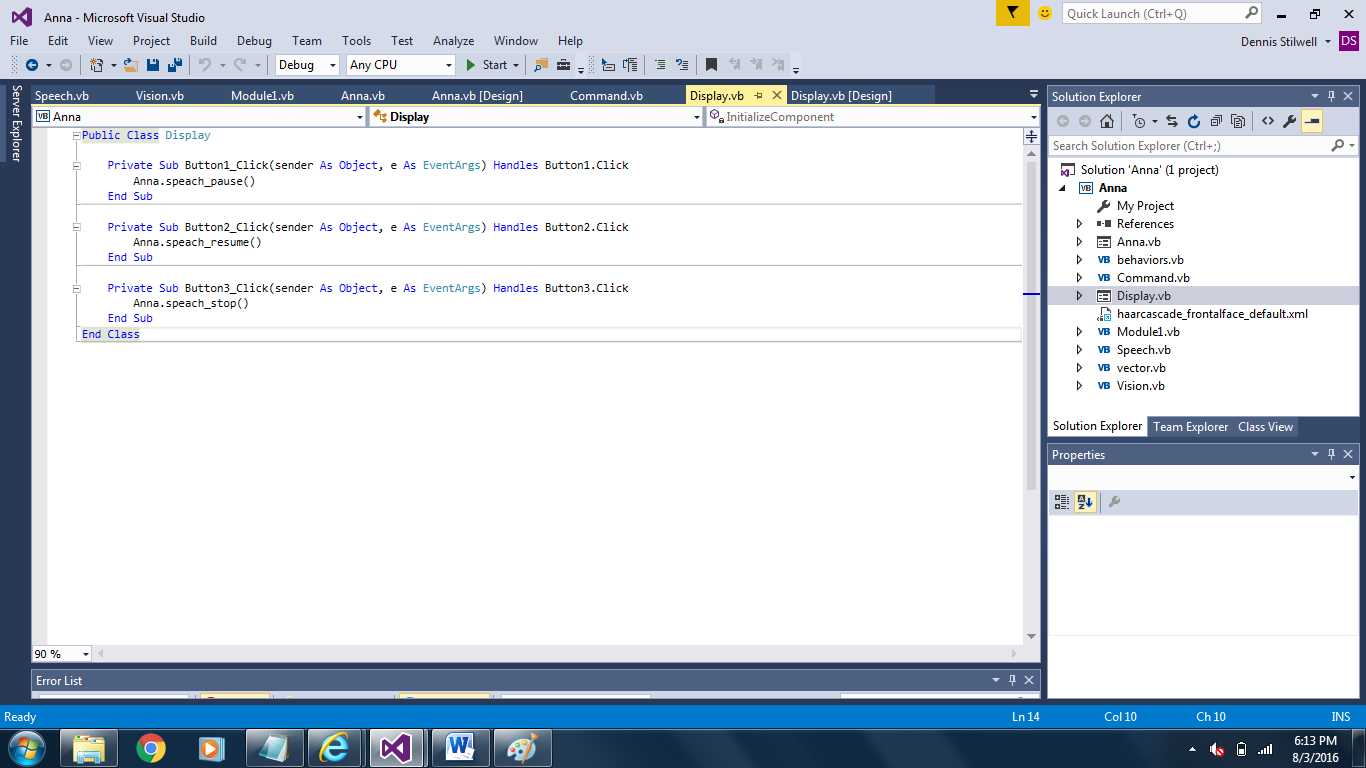
 Here's the complete code:
Here's the complete code: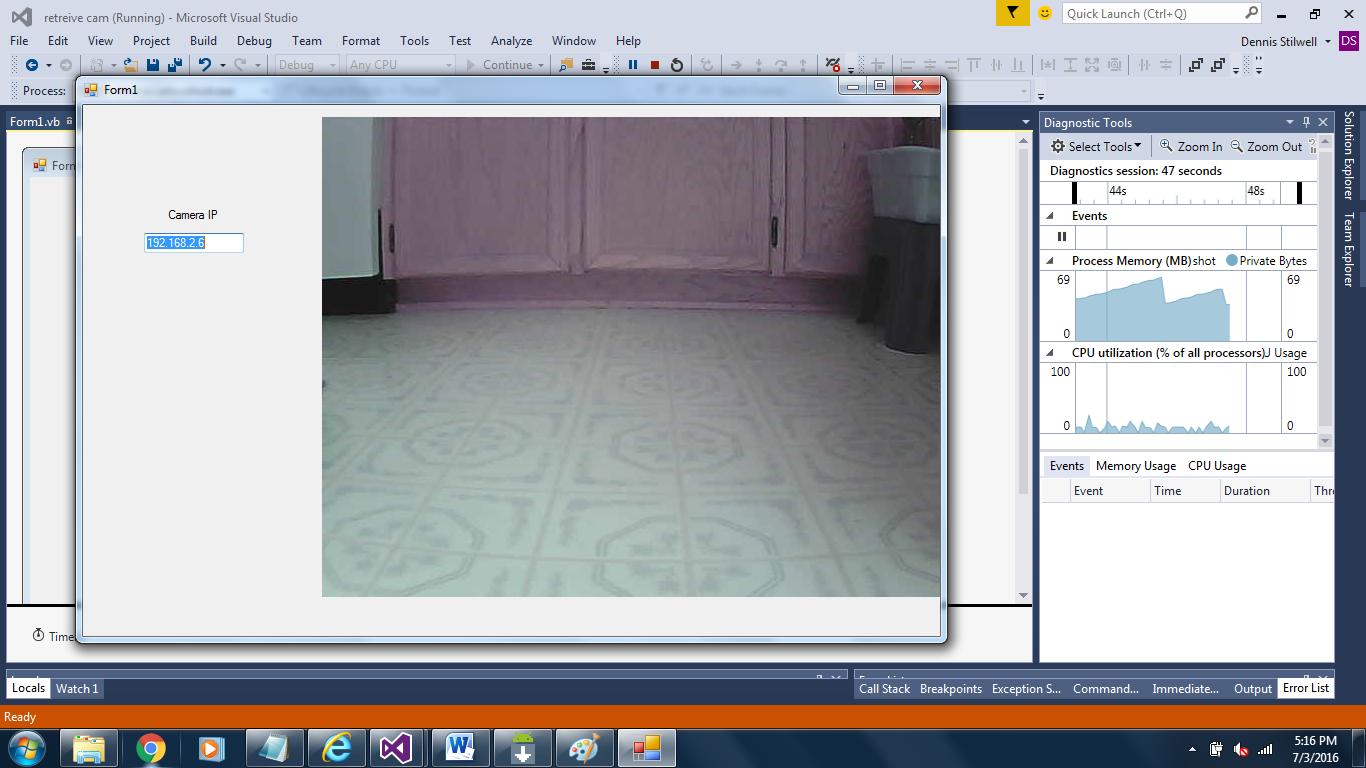



 DaxMoonJuice
DaxMoonJuice
 Bill Edds
Bill Edds
 xD
xD
Sounds like a great idea! Quick question, are any of the software used for face recognition by products like Amazon Echo even remotely open source? Or are they usually in-house algorithms?