My first prototype, using a slow-cooker, wasn't working so well. So, I adapted, and, with a spark of inspiration, I went to the local pet-shop, and came back with some parts...
So, what makes a sous-vide system?
- First, of course, you need a container; just about any will do.
- Second, some water.
- Third, you need a source of heat.
- Fourth, a way to tell how hot your water is.
- Fifth, a controller for your heat source.
- ...and, optionally, sixth, a way to circulate the water.
A random bucket meets the need for the first, my sink the second, a DS18B20 the fourth, and obviously a Arduino, or a Raspberry PI, for the fifth.
What about the third and the sixth? COTS water heaters for small volumes, and high temp pumps, don't exactly fall off the shelves.
Pet-store to the rescue!
- For the third, an aquarium heater is just about perfect... you've just got to lobotomize the thermostat.
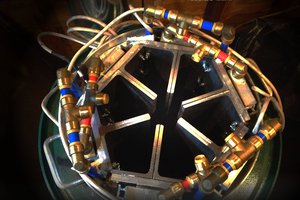
- The sixth, that's a bit more tricky. However, if we look at the Wikipedia article on Airlift Pumps, we can see that a simple pump can be made, with no moving parts, if you have an air source. Cue, the aquarium bubbler pump! A bubbler pump is designed for long run times, doesn't cost much, and satisfies the need for an air source.
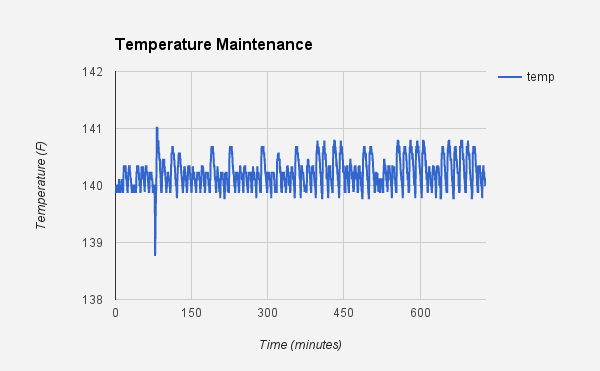
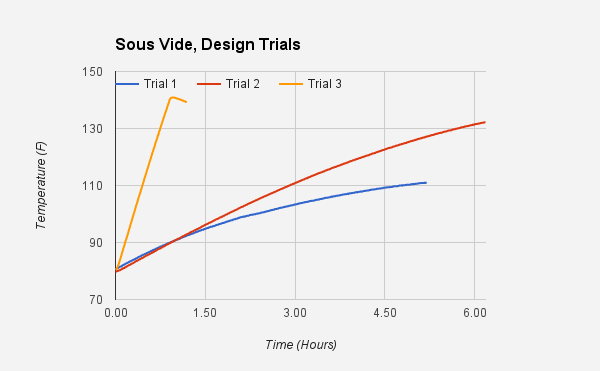
Now... to test....




 Rob Parzek
Rob Parzek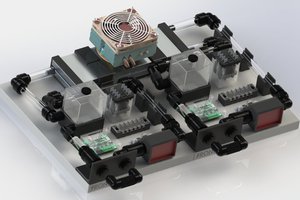
 David Scholten
David Scholten
 alexwhittemore
alexwhittemore
 JanoHak
JanoHak
this is really amazing project . i am also working on a cooking gear lab page.