 The Meiquer
The MeiquerMy initial goal was just to make It stand on It's feet and use some sensors like ultrasonic, gyro, pir, temperature and hummidity, but now I want more. I'm happy with the results until then and would be glad with opinions and tips about this project. Here is a video where I'm testing the leg motors:
0%
0%
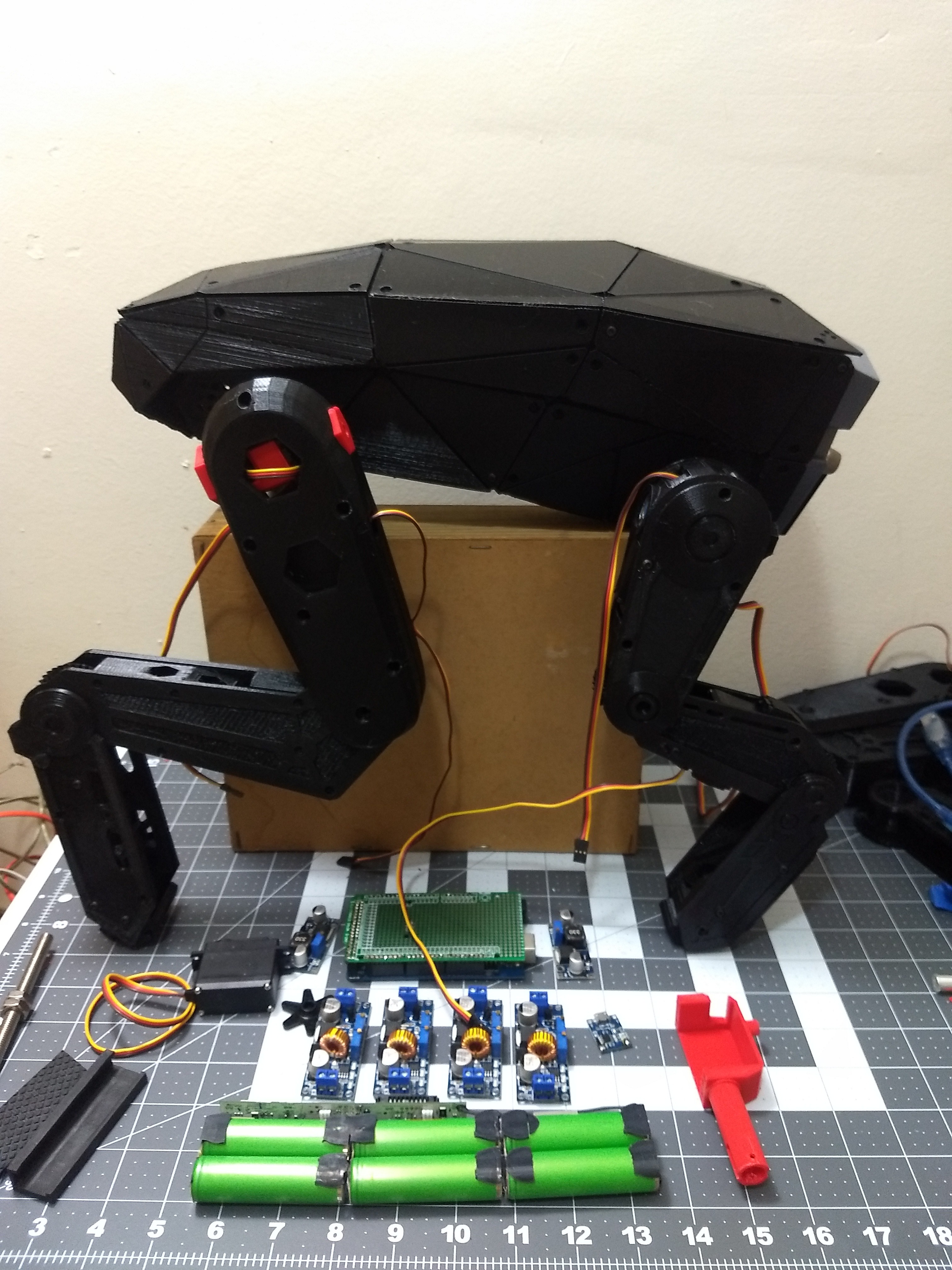
Black Mirror's Metalhead Dog
In this project I'm trying to bring to life an evil robot from Black Mirror series, the Metalhead dog
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Adam Jensen
Adam Jensen
 andrew.powell
andrew.powell
 T3rr0rByte13
T3rr0rByte13
 Victor Barahona
Victor Barahona
Can you share the list of top program files of your pet project? I want to test it for my corgi chihuahua mix page.