 Lars
LarsI try to incorporate the following aspects into the design:
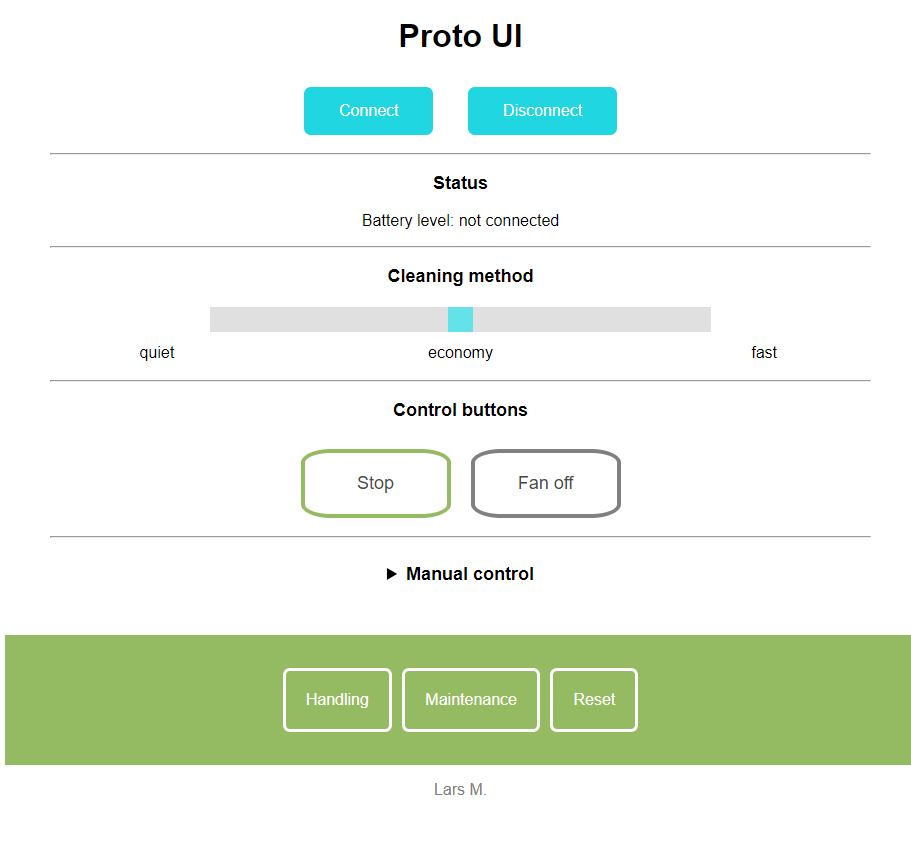
- A pretty important aspect of every design is functionality. The robot should be able to do what its name suggests, without the need to study manuals
- Intuition. Intuitive operation and high functionality lead to frequent use of the device. Therefore the robot should be as easy to control as possible, to actually use it effective in everyday life. It would also saves time to use it for something more important than floor cleaning. Maybe to create more vacuum robots.
- Safety. This aspect should not be ignored either. Safety means, that the robot should not accidentally fall downstairs or behave unpredictable.
- Fun. This is the main reason why I started this project. I am learning a lot by working on this vehicle. The special thing about building a robot vacuum cleaner is, that there are so many different areas in which you further educate yourself during construction. In addition to electronics, I learned a lot of things about mechanics and 3D printing, which I subsequently applied to other projects. You really don't find such a variety of topics in every project.





 Will Donaldson
Will Donaldson
 Ben Peters
Ben Peters
 maks.przybylski
maks.przybylski
 M. Bindhammer
M. Bindhammer