 Maximiliano Rojas
Maximiliano Rojas

0%
0%
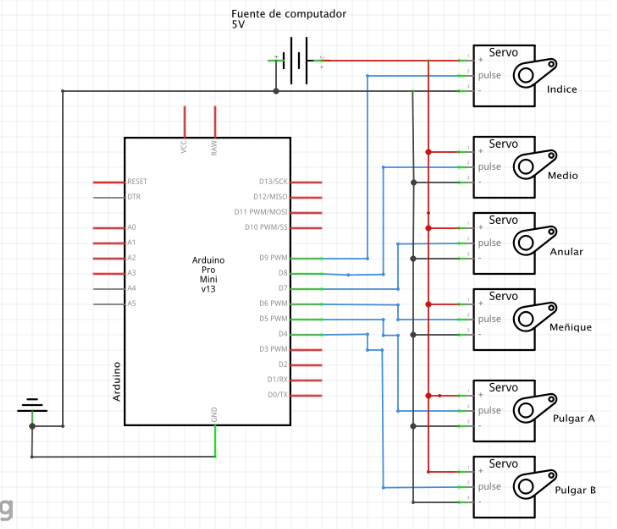
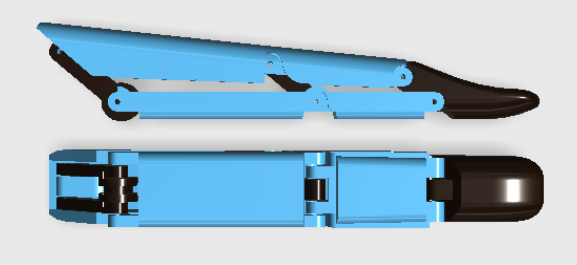
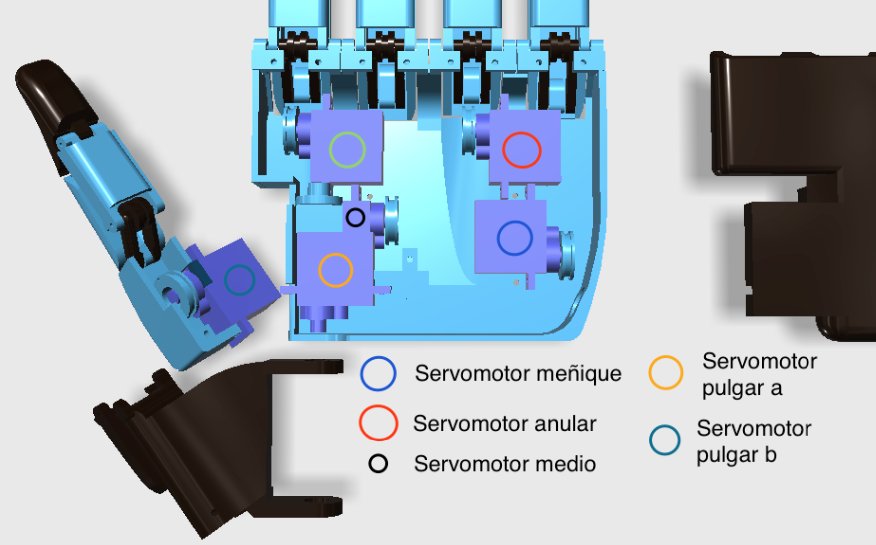
[2016] Robotic hand + Leap Motion
This is an old project of a robotic hand that I built like 4 years ago, it is controlled with a leap motion interfaced through Processing.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Les Hall
Les Hall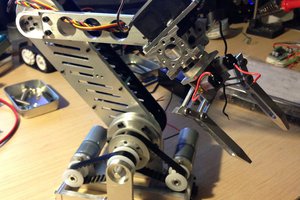
 CLo
CLo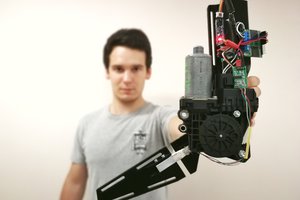
 Kristjan Berce
Kristjan Berce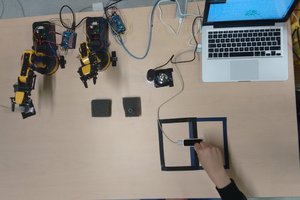
 Giovanni Leal
Giovanni Leal