0%
0%
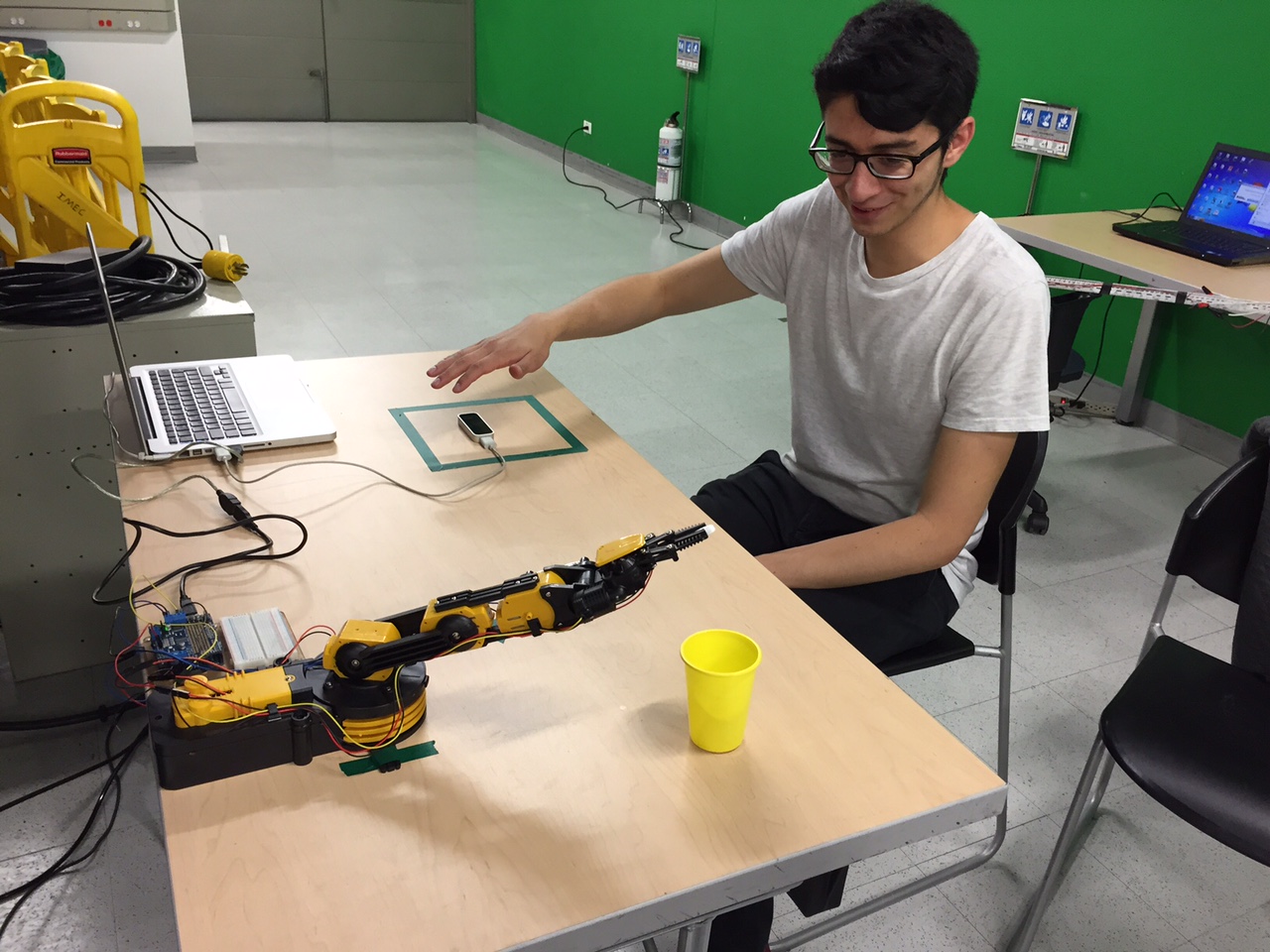
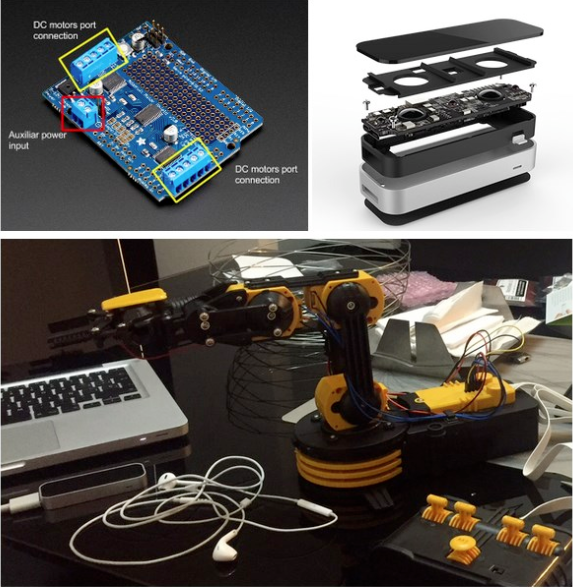
Owi arm controlled by a LEAP Motion
The idea is to create a non convencional interface to control a robotic arm
 Giovanni Leal
Giovanni LealBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 As you can see the first one we also marked the space where the sensor picks up the hand. The results are the following:
As you can see the first one we also marked the space where the sensor picks up the hand. The results are the following: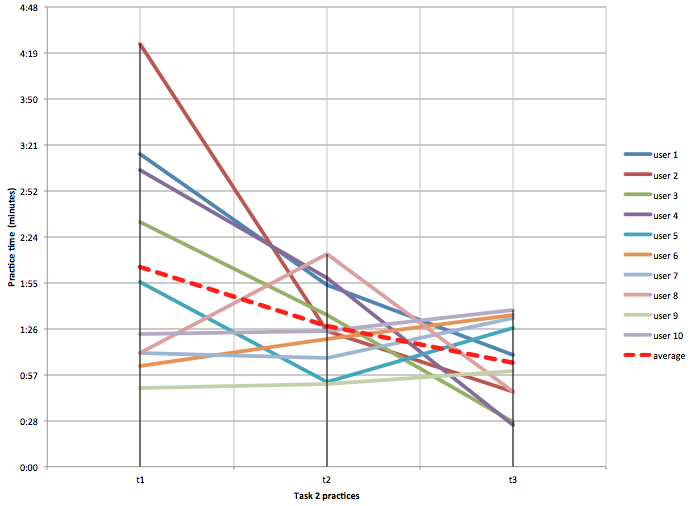 The learning curve show that the system provides a easy to use interface.
The learning curve show that the system provides a easy to use interface.
 This formula corresponds a two hand configuration setup.
This formula corresponds a two hand configuration setup.

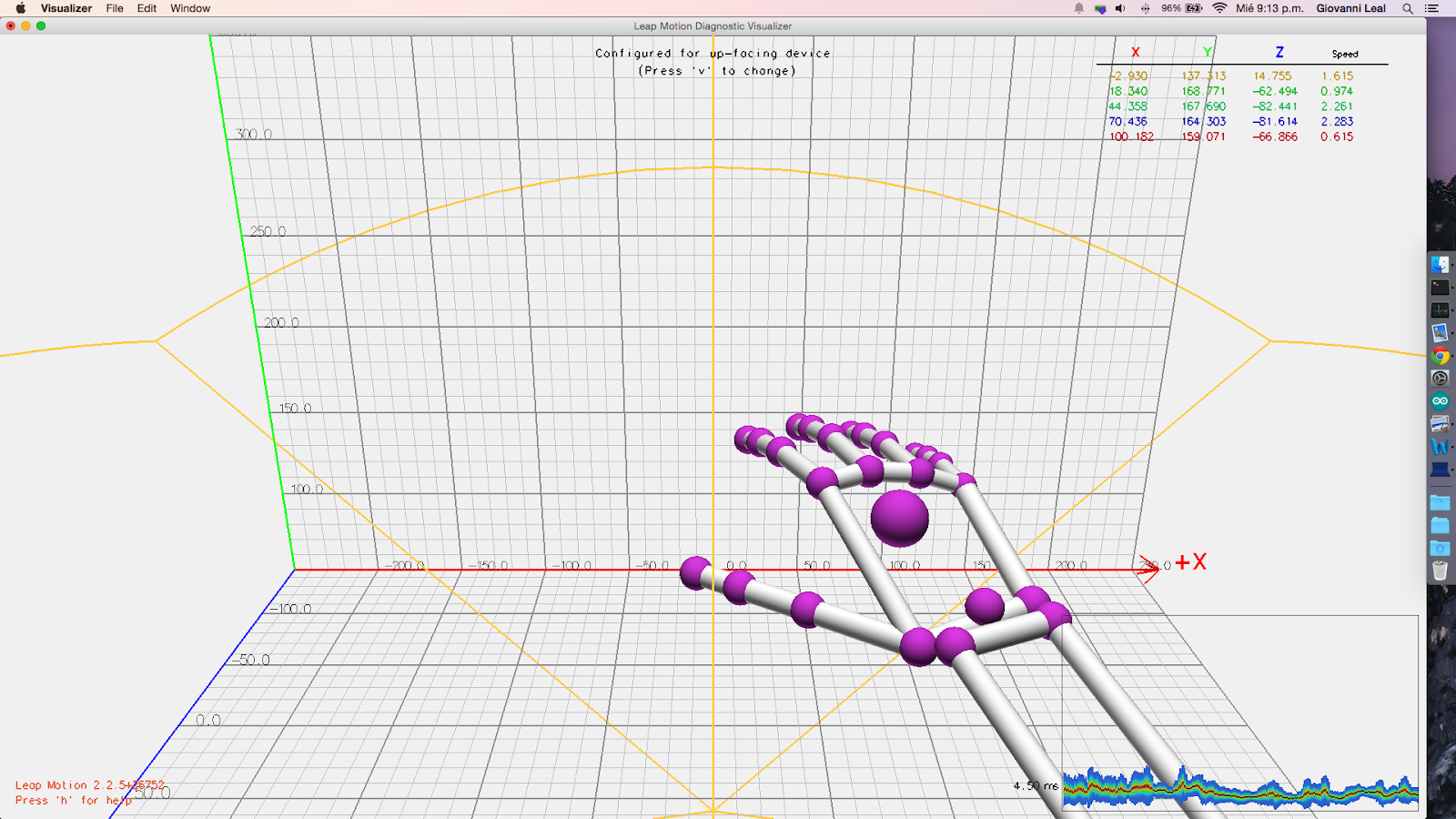 With this you will get wich is the field where it works and that superposition is a big no no on this thing.
With this you will get wich is the field where it works and that superposition is a big no no on this thing.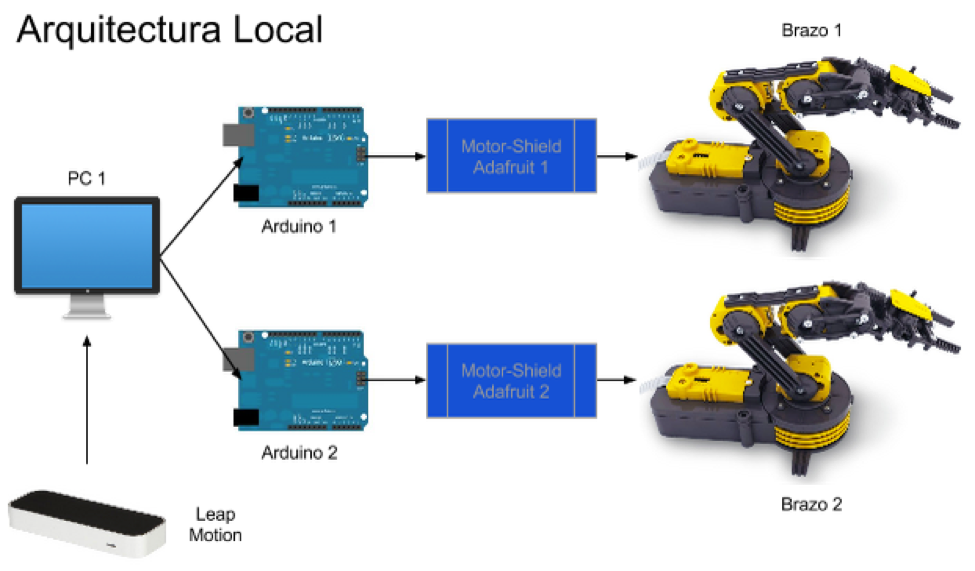
 Kumar, Abhishek
Kumar, Abhishek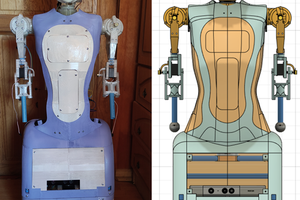
 Maximiliano Rojas
Maximiliano Rojas
 Daniel Felipe Valencia V
Daniel Felipe Valencia V
 AngelLM
AngelLM
Good day Sir, can you help me regards to this error cannot find anything named "gesture", thank you very much.