 Jacob David C Cunningham
Jacob David C CunninghamParts list
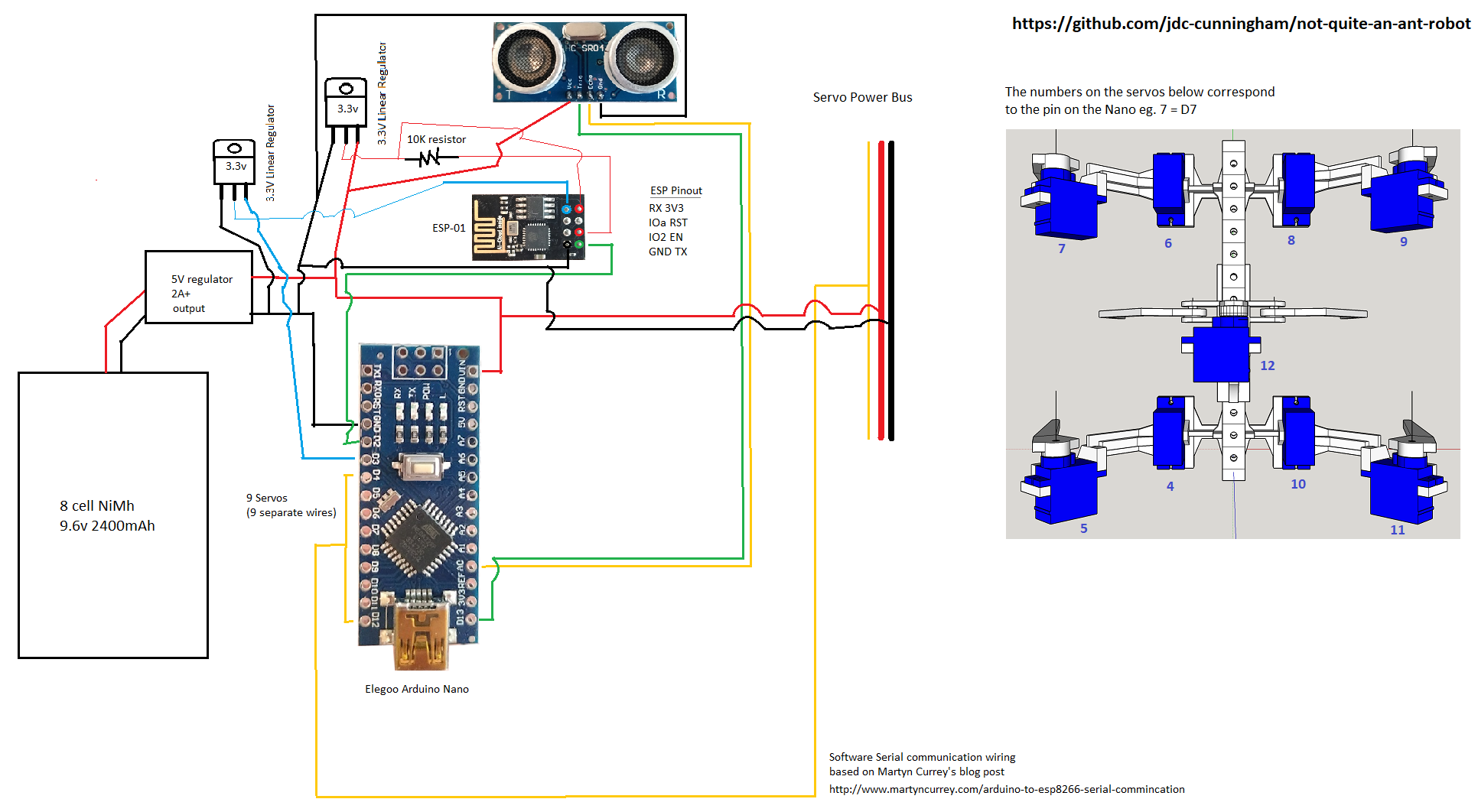
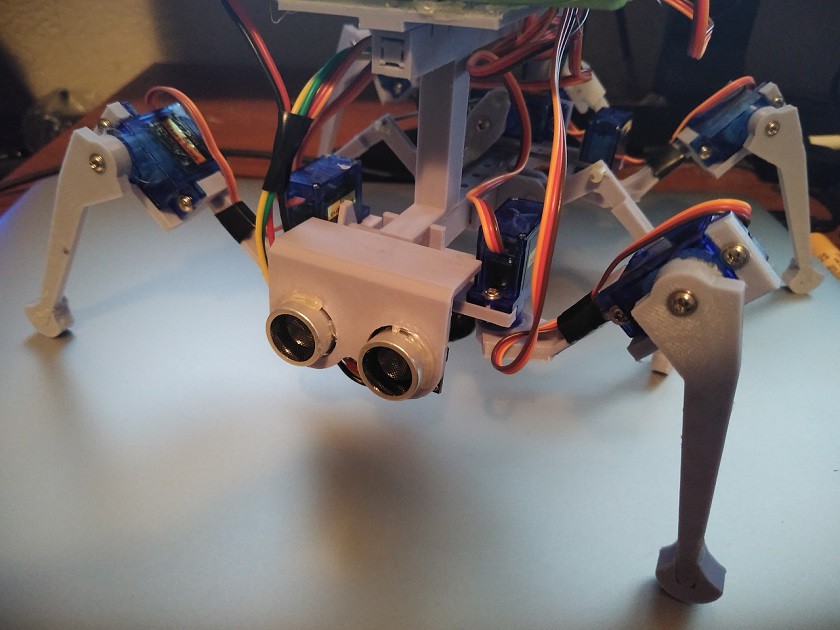
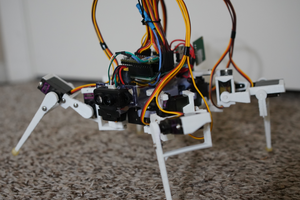
- 9g servo x9
- Arduino Nano
- ESP8266-01
- 5V linear regulator
- 3.3V linear regulator x2
- 10K resitor
- UBEC for battery pack
- 9.6v 8cell 2400mAh NiMh battery pack
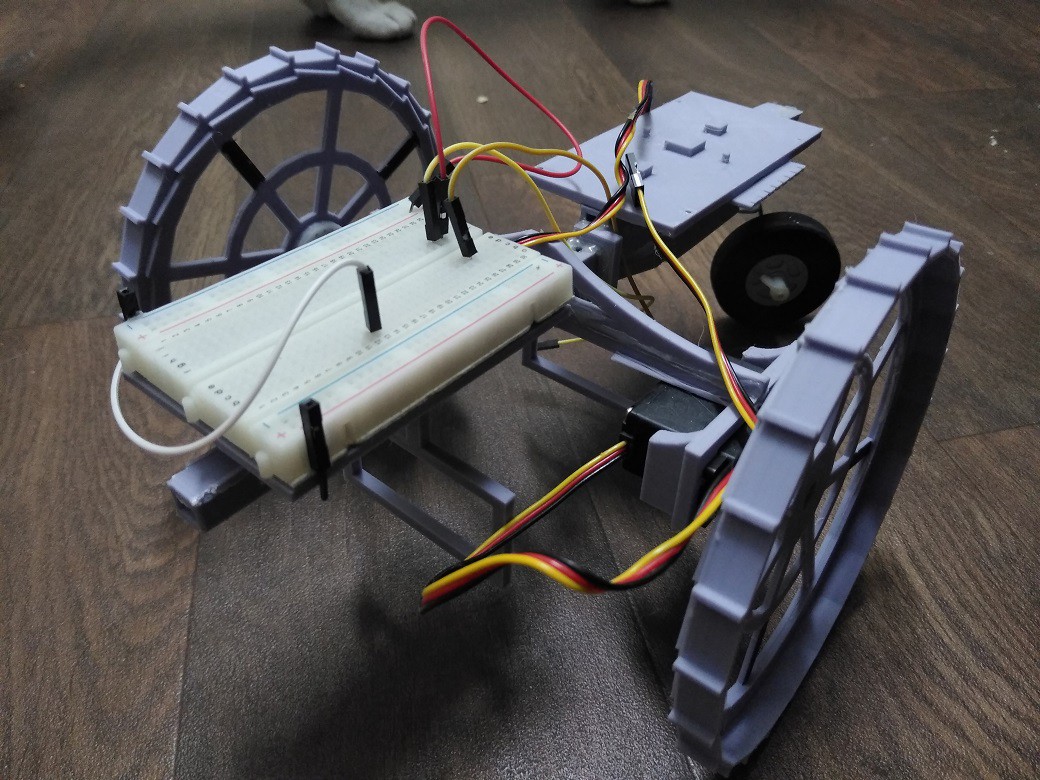
- solderable breadboards
- breadboards
- breadboard wires
- 3D printer/filament
- hot/super glue
Repo

 David Greenberg
David Greenberg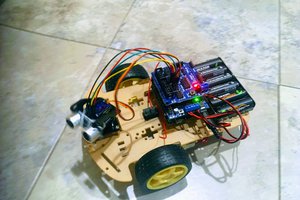
 Kyle Isom
Kyle Isom
 deʃhipu
deʃhipu