 AdaCore
AdaCoreO
0%
0%
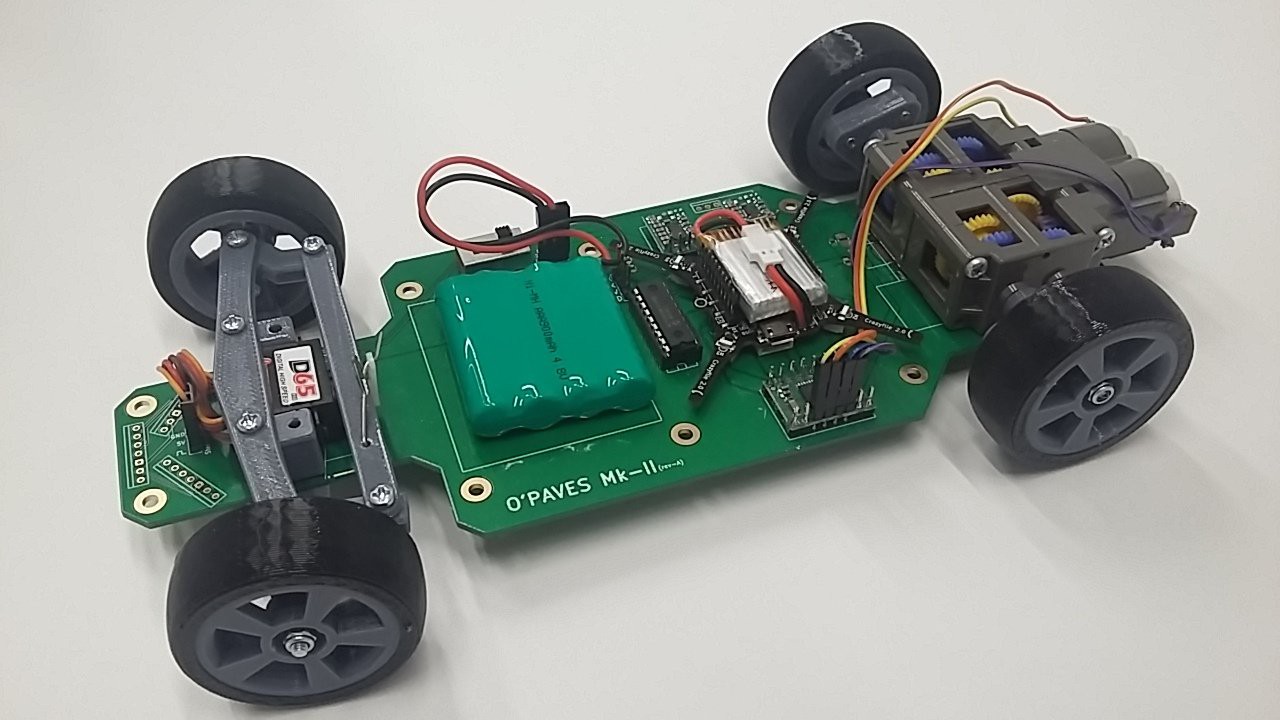
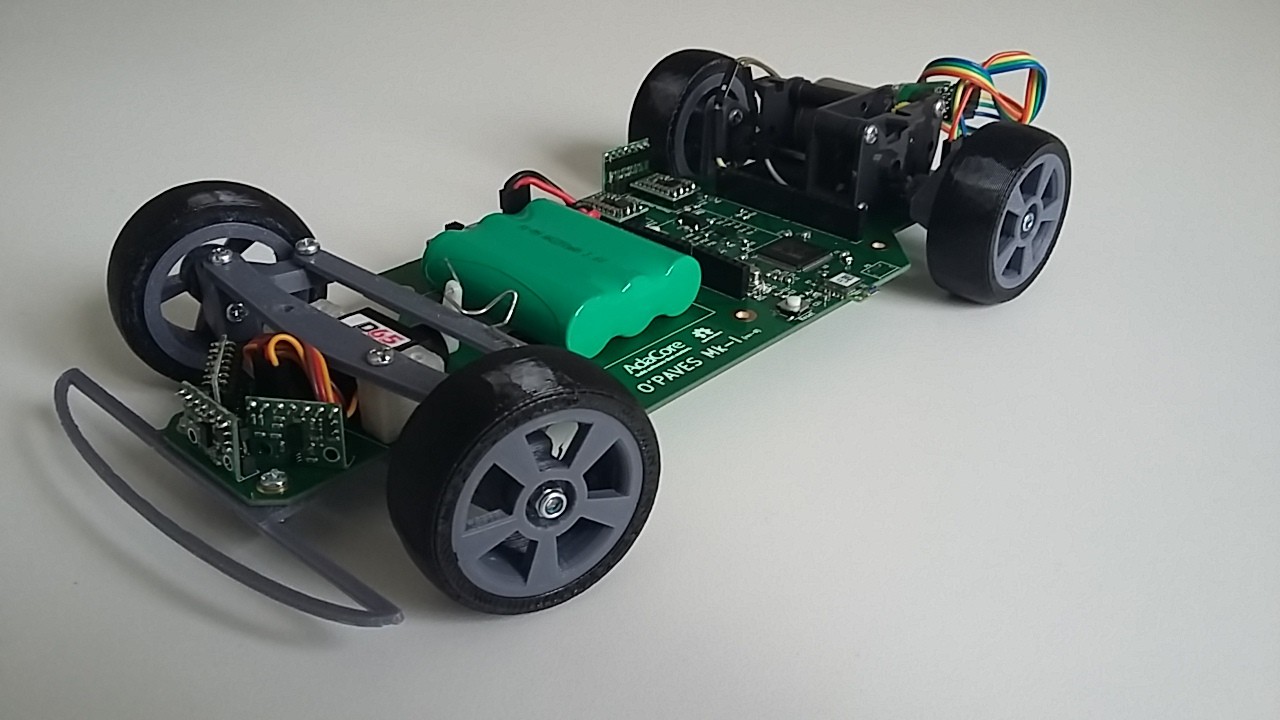
O'PAVES
Open Platform for Autonomous VEhicle Systems
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 fr293
fr293
 Zdenek Hurak
Zdenek Hurak
 Dev Joshi
Dev Joshi
 Paul Gould
Paul Gould
whoww...show me the tools your project