0%
0%
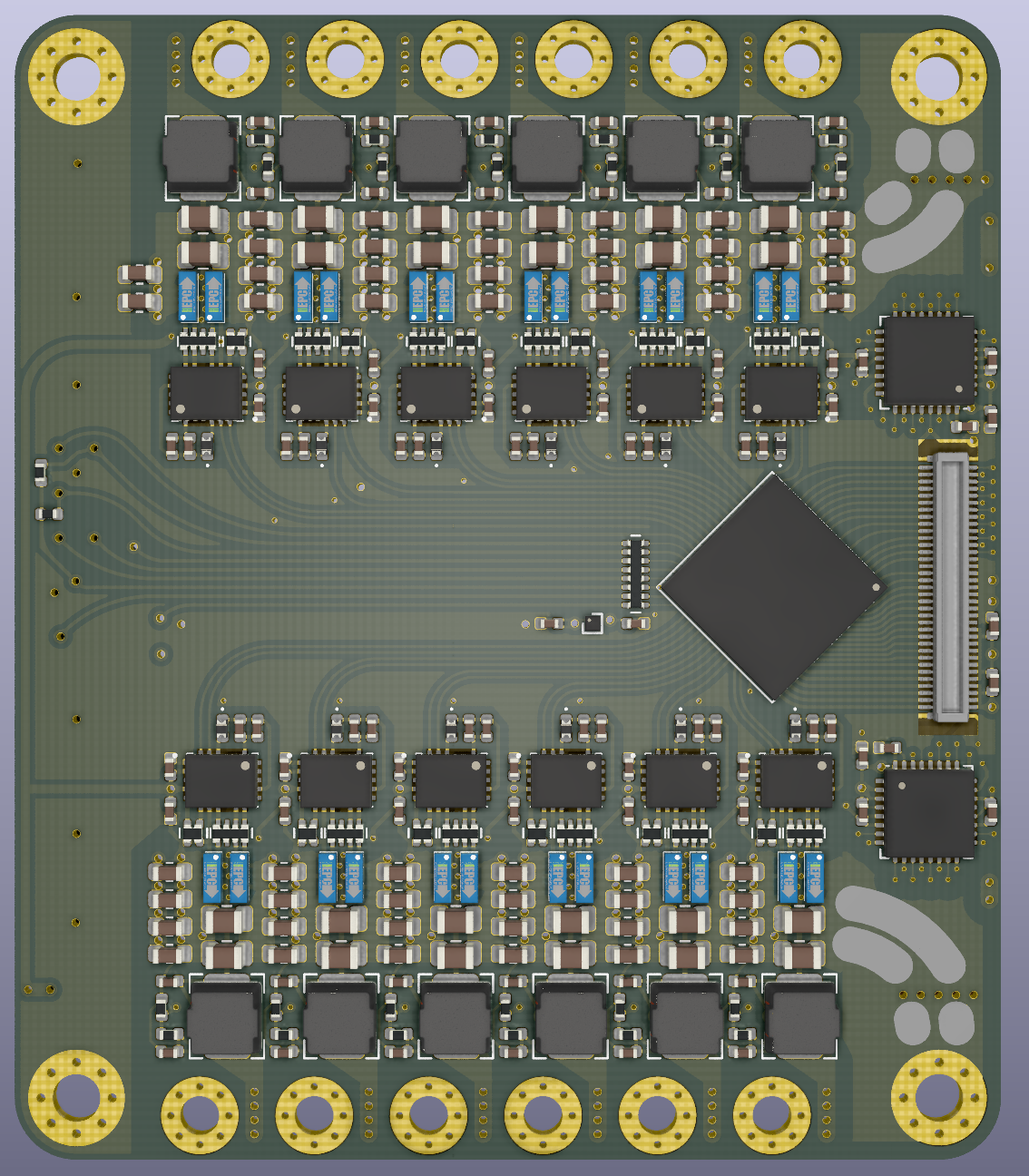
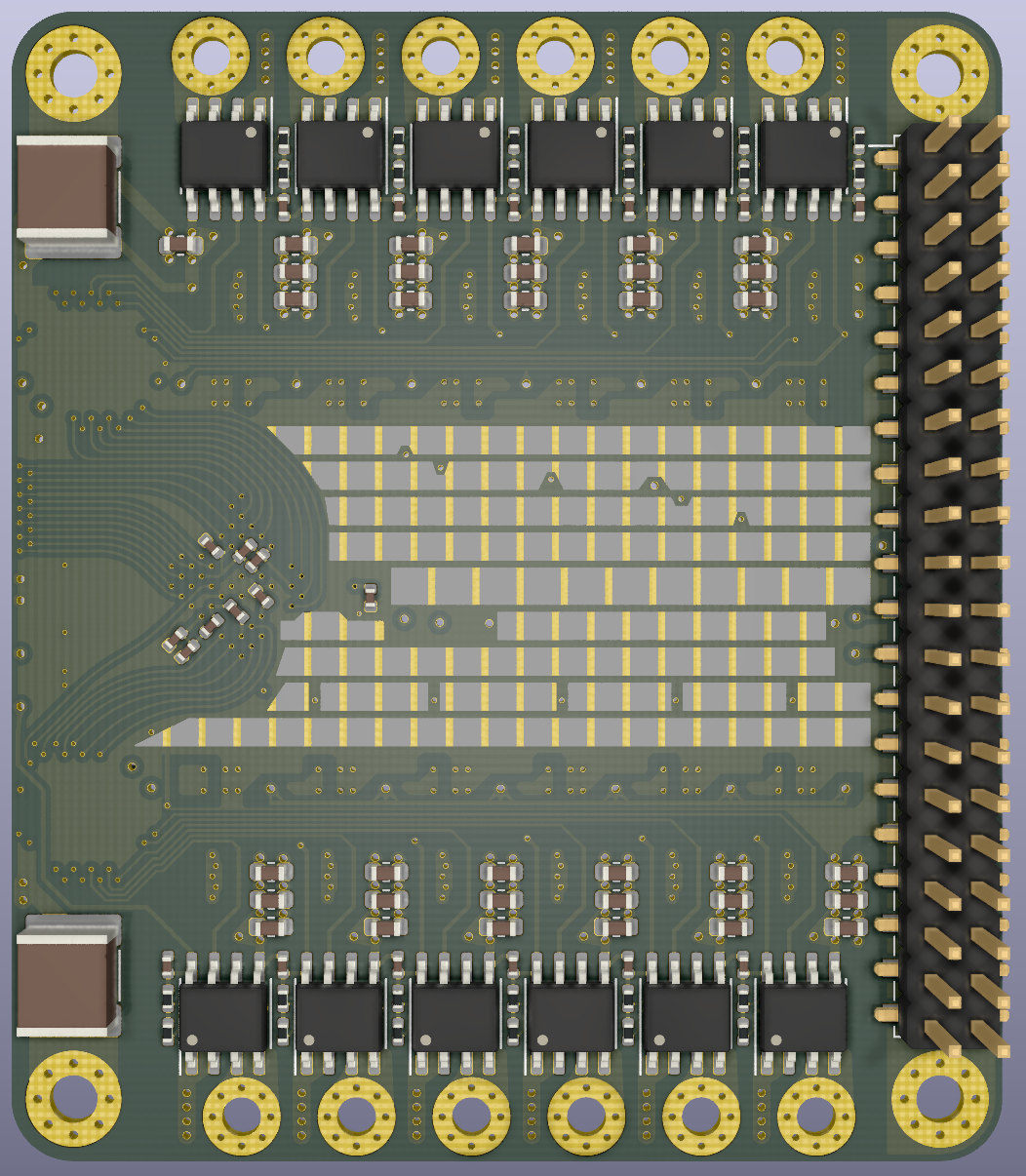
FOCESCPI
A Field Oriented Control Electronic Speed Controller for the Raspberry Pi!
 Sina Roughani
Sina RoughaniBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 julien
julien
 pkElectronics
pkElectronics
 Tobius
Tobius
 Ryan Walmsley
Ryan Walmsley
"This is a good idea, I will also use it on my website."https://en.wikipedia.org/wiki/KDKL